№ 4
ИЗВЕСТИЯ АКАДЕМИИ НАУК ЭНЕРГЕТИКА
2008
УДК 621
© 2008 г. ДЖАГАРОВ Н.Ф., ГРОЗДЕВ Ж.Г.
АДАПТИВНОЕ УПРАВЛЕНИЕ ПОПЕРЕЧНОГО УПРАВЛЯЕМОГО КОМПЕНСАТОРА ДЛЯ УЛУЧШЕНИЯ УСТОЙЧИВОСТИ ЭЛЕКТРОЭНЕРГЕТИЧЕСКИХ СИСТЕМ
В статье предложено быстрое адаптивное управление статического поперечного управляемого компенсатора, состоящего из группы тиристорно переключаемых конденсаторов и тиристорно управляемого реактора. Управляемая система идентифицируется в реальном времени и с помощью оцененных параметров и переменных идентификационной модели формируется управляющий сигнал для компенсатора. Использование этого метода управления позволило значительно увеличить демпфирование системы, в частности, в критических режимах, близких к границе устойчивости, используются только измеренные переменные режима в месте включения компенсатора. Это управление увеличивает также и пропускную способность линии. Полученные в результате моделирования экспериментальные результаты показывают эффективность работы компенсатора, в результате этого улучшаются все характеристики переходных процессов.
Введение. Развитие и прогресс в разработке мощных силовых полупроводниковых приборов и цифровой техники управления в последние годы способствовали разработке управляемых статических компенсаторов, называемых управляемыми источниками (генераторами). Появление в шестидесятых годах прошлого века статических поперечных компенсаторов (СПК) обеспечило быстрое, непрерывное или дискретное регулирование напряжения при мощных пульсирующих нагрузках, например электродуговые печи [1]. Сначала они использовались для управления напряжением в узких частях линий передач и в мощных сетях электроснабжения. Известны и используются два типа управляемых поперечных компенсаторов: статический управляемый компенсатор (СУК) и шунтовый (параллельный) статический синхронный компенсатор (ШССК).
Параллельная компенсация используется для улучшения естественных электрических характеристик линии передачи, для повышения пропускной способности в статических режимах и для управления формой напряжения линии.
Демпфирование колебаний в электроэнергетических системах (ЭЭС) является одной из основных целей использования СУК. Демпфирование системных колебаний играет важную роль не только в улучшении пропускной способности, но и в обеспечении устойчивой работы системы в критических аварийных режимах, например в слабо связанных системах.
Дополнительный стабилизационный сигнал и дополнительное управление, включаемое в контур управления СУК, обеспечивает демпфирование колебаний системы. Обычно СУК рассматривается как переменное реактивное сопротивление с ограничениями максимальных индуктивностей и емкостей для управления напряжением на шинах СУК с дополнительным управляющим блоком и стабилизирующим сигналом.
Способность регулятора формировать быстро управляющий сигнал дает возможность улучшения работы ЭЭС. Одним из важнейших преимуществ является улучшение устойчивости системы [2].
Основная схема СУК представляет нерегулируемый конденсатор, включенный параллельно с тиристорно управляемым реактором (НК-ТУР). Ток реактора управляется с помощью угла управления тиристоров, регулируя, таким образом, реактивную энергию системы. При больших возмущающих воздействиях в первый период времени нельзя управлять поведением системы. Во время переходного процесса напряжение существенно ограничивается постоянной емкостью и импедансом ЭЭС. Все это может привести к перенапряжениям и к резонансным явлениям в ЭЭС.
Исследуемая система
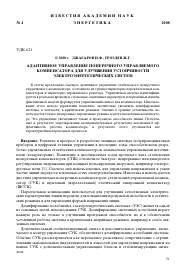
Рассматривается поперечный статический компенсатор, состоящий из группы тиристорно переключаемых конденсаторов (ТПК) и тиристорно управляемого реактора (ТУР) (рис. 1). Эта гибридная схема разработана специально для устранения недостатков схемы НК-ТУР при наличии больших возмущающих воздействий [3-5]. Управляемый реактор непрерывно регулирует реактивную энергию, регулируя амплитуду тока реактора, что выполняется с помощью угла управления тиристоров тиристорного ключа ТК1 (рис. 1). Таким образом, регулируется индуктивность реактора. Угол управления может изменяться от 90 до 180° по отношению к напряжению компенсатора, при этом он может измениться в пределах одного периода основной частоты, позволяя, таким образом, быстро и плавно регулировать отдаваемую или потребляемую реактивную энергию системы. Эффективный емкостной импеданс схемы изменяется в зависимости от числа включенных емкостных цепей. Общая емкость разделена на четыре группы, которые включаются/выключаются тиристорным ключом (ТК). При первом рабочем интервале включения компенсатора к ЭЭС одна емкостная цепь включена вместе с ТУР, при этом его ток устанавливается на необходимом уровне компенсации. В г-м интервале выход контроллера регулируется в границах [(г - 1)СУКтах/4] до [гСУКтах/4], с помощью включения г-го конденсатора и использования ТУР для всасывания лишней емкостной энергии. Эту схему можно рассматривать как обычную схему НК-ТУР, в которой относительный вес реактора мал (на 1/4 меньше, чем выход СУК), и количество конденсаторов изменяется дискретно для обеспечения работы реактора в нормальных границах управления. Обычно при выключенном тиристоре конденсатор начинает разряжаться и его напряжение уменьшается. Для устранения сложностей переходных процессов конденсаторы ТПК должны включаться при нулевом напряжении включающих тиристоров. Несмотря на это, опять будут иметь место переходные процессы из-за ненулевой величины (dU^^/dt) в момент включения, что при отсутствии ограничивающего реактора вызовет мгновенный ток конденсатора (IC = CdU^Jdt). Переключение конденсаторов должно быть в определенном моменте каждого периода, удовлетворяющем условиям минимальной переходной неустойчивости, поэтому тиристорно переключаемая емкостная цепь создает только ступенчатое изменение реактивного тока (максимум или нулевое).
На рис. 1 показана исследуемая схема ЭЭС, включающая: синхронный генератор СГ с регуляторами возбуждения и скорости; линия передачи с сопротивлением Zn, связывающая генератор с шинами бесконечной мощности В; эквивалентная статическая RL-на-грузка (Zp), эквивалентная асинхронная нагрузка АД; статический управляемый компенсатор СУК с адаптивным управлением. На вход адаптивного контроллера подается сигнал для идентификации состояния системы - напряжение на шинах Bv Адаптивный контроллер вычисляет оценки переменных и параметров идентификационной модели системы, с помощью которых вычисляется дополнительный управляющий сигнал ВСУК. Используя полученный сигнал, регулятор синтезирует два сигнала: управляющий угол ОрУР для тиристоров тиристорного ключа ТК: управляемого реактора; сигнал aon/og для
АД
2,
11 г
¡ээс
Вг
иа
ив
Адаптивный регулятор
Управление тиристоров
/в2 ® ТКг] ТК2
ТПК
а
'ап/а//
ЬЬ ёг~— ё^—— С3 — —
Тр
аур
аТУР
БР
СУК
Рис. 1. Схема исследуемой системы
исУК А
Емкостной Индуктивный Диапазон управления
4 3 2 1 4тах
Конденсаторные группы
Рис. 2. Вольт-амперная характеристика СУК
включения/выключения конденсаторных групп к ключам (ТК-ТК5), которые распределяются блоком БР.
На рис. 2 вольт-амперная характеристика СУК, на которой в емкостном диапазоне управления показаны четыре степени переключения конденсаторных групп.
Математическая модель системы
Уравнения синхронного генератора. Уравнения генератора записаны в системе относительных единиц МБ, в собственной координатной системе й, д, 0, жестко связанной с его ротором. Уравнения всех остальных элементов системы - статическая нагрузка, линия, АД и СУК записываются в синхронно вращающихся осях й, д, 05уп. При объединении уравнений всех элементов ЭЭС в общую модель системы статорные токи СГ преобразуются к синхронной системе координат, а напряжение на шинах Вг записывается в осях генератора.
В
2
В
СУК
Модель генератора записана в форме Коши [6]
Ш
йг
СГ«
'СГг
АСГ«« АСГ«г АСГг« АСГгг
СГ«
' СГг
ВСГ«« ВСГ«г ВСГг« ВСГгг
и
В1
СГ«
СГг
ВСГ«« ВСГ«г ВСГг« ВСГгг
й
и
В1
- СГ.М
-(Мпд + мсг).
где индекс « относится к статорным переменным и параметрам, г - к роторным; элементы матриц А и В являются функциями статорных и роторных индуктивных и активных сопротивлений и угловой скорости вращения координатной системы й, ц, 0 - юк; ТСГ М -механическая постоянная времени генерирующего агрегата; МСГ = хай(1а + ¡р + ¡^¡ц - хад(1д + + 1})1Л - электромагнитный момент генератора; МПд - момент первичного двигателя;
[I,
СГО
иВ1 = [ий1, ид1]' - вектор напряжения шин В1; ир - напряжение возбуждения; 1СГ« ■■ ¡СГс], 1СГг = [¡СГр ^СГg, ¡СГл]г - соответственно, векторы токов статора и ротора.
Так как уравнения ЭЭС записаны в осях й, ц, 0«уп, вращающихся синхронно, то ста-торные матрицы и векторы модели СГ, входящие в общую модель энергосистемы, преобразуются в эту координатную систему с помощью следующих выражений:
г Ь
ВСГ«« _ ТгЬВ СГ««.
г Ь
НСГ« _ ТгЬН СГ«.
тг _ Т тЬ .
1 СГ« _ 1 гЬ1 СГ«.
ТгЬ _
ео8 5гЬ; вт 5
гЬ
-вт 5гЬ; ео8 5^
_ ®кг - ®кЬ _ - Ю«уп)йг.
(2)
где верхний индекс г означает, что матрицы и векторы записаны в координатной системе СГ; верхний индекс Ь - в синхронной координатной системе.
Напряжение на зажимах СГ иВ1 в правой части (1) получается с помощью следующего преобразования:
г Ь
иВ1 _ ТЬгиВ1.
(3)
где ТЬг =
ео8 5гЬ; -вт 5
гЬ
вт 5гЬ; ео8 5^
Уравнения асинхронного двигателя. Уравнения АД записаны в синхронной координатной системе й, ц, 05уп [6]:
й тад« ААд«« ААд«г тад« + вад««
йг 1Адг А Ад г« ААдгг 1Адг в ад г«
и
В1>
(4)
Ш Ю _ Т
АД.М
-(Мд - МС),
(5)
где индекс « относится к статорным переменным и параметрам, г - к роторным; элементы матриц А и В являются функциями статорных и роторных индуктивных и активных сопротивлений и угловой скорости ротора Юг; Мд = хай(гАдгй, гАд? - гАдг?гАдй) - электро-
+
и
+
и
о
магнитный момент АД; /АД5 = [гАД^, гАД/; /АДг = [гАДпг, ^д^Г; Мс = юг - момент сопротивления на валу двигателя; ТМ - механическая постоянная времени механизма и АД. Уравнения статической ЯЬ нагрузки.
/¿на - -ан11 /на + asyn^Hq + Ън 11иа 1 - ^на + Ън 11 и/1;
а (6)
d[/нq - -аН 11 iHq - ®$у
Для дальнейшего прочтения статьи необходимо приобрести полный текст. Статьи высылаются в формате PDF на указанную при оплате почту. Время доставки составляет менее 10 минут. Стоимость одной статьи — 150 рублей.