Малистов А. С., кандидат технических наук, зам. руководителя отдела ЗАО «ЭЛВИС-НеоТек» Злобин Д. О.
(Национальный исследовательский университет (МИЭТ))
АЛГОРИТМ И АНАЛИЗ ПОГРЕШНОСТИ ОПРЕДЕЛЕНИЯ СРЕДНЕЙ СКОРОСТИ АВТОМОБИЛЯ ДВУХКАМЕРНОЙ КОМПЬЮТЕРНОЙ ВИДЕОСИСТЕМОЙ
В статье рассматривается система видеонаблюдения, которая состоит из двух камер, установленных на расстоянии друг от друга вдоль дороги, и предназначается для измерения средней скорости автомобиля. Производится оценка погрешностей определения скорости транспортного средства.
This paper describes the principles of the surveillance system, which consists of two chambers arranged spaced from one another along the road. We estimate errors occurring in vehicle speed detection algorithm.
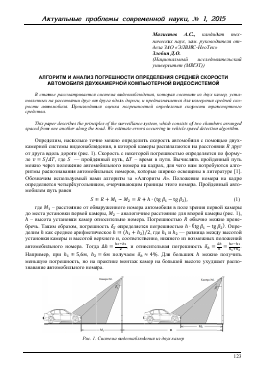
Определим, насколько точно можно определить скорость автомобиля с помощью двухкамерной системы видеонаблюдения, в которой камеры располагаются на расстоянии R друг от друга вдоль дороги (рис. 1). Скорость с некоторой погрешностью определяется по формуле V = S/AT, где S — пройденный путь, AT - время в пути. Вычислять пройденный путь можно через положение автомобильного номера на кадрах, для чего нам потребуются алгоритмы распознавания автомобильных номеров, которые широко освещены в литературе [1]. Обозначим используемый нами алгоритм за «Алгоритм А». Положение номера на кадре определяется четырёхугольником, очерчивающим границы этого номера. Пройденный автомобилем путь равен
S = R+M1-M2=R + h^tgP1-tgP2), (1)
где Мг - расстояние от обнаруженного номера автомобиля в поле зрения первой камеры до места установки первой камеры, М2 - аналогичное расстояние для второй камеры (рис. 1), h - высота установки камер относительно номера. Погрешностью R обычно можно пренебречь. Таким образом, погрешность Ss определяется погрешностью h • (tg p1 — tg /?2). Определим h как среднее арифметическое h = (h± +h2)/2, где h± и h2 — разница между высотой установки камеры и высотой верхнего и, соответственно, нижнего из возможных положений
/i Ah /1
автомобильного номера. Тогда Ah = ——-, и относительная погрешность Sh = — = ——-.
2 h ft-i + ft.2
Например, при = 5,6м, h2 = 6м получаем Sh ~ 4%. Для больших h можно получить меньшую погрешность, но на практике монтаж камер на большой высоте ухудшает распознавание автомобильного номера.
Рис. 1. Система видеонаблюдения из двух камер
Из-за дискретного представления изображения алгоритм А не может точно очертить автомобильный номер и вместо верного угла Р мы получаем его неточную оценку р' (рис. 2). Пусть dHUИкс и dH — погрешность алгоритма А [пиксели и метры], Нпикс и Н — высота номера [пиксели и метры], К — расстояние вдоль дороги от места установки камеры до точки,
• н
где обнаружен номер. Тогда dH = ——. Рассмотрим ААВС (рис. 2). В нём СВ = йН - это
^пикс
погрешность, которую допускает алгоритм А, а АВ - это погрешность в определении К из-за ошибки алгоритма: АК = АВ = СВ tg р = йН tg р. Заметим, что АК ^ тИх ^ р * Ртах, а Ртах * где Ктах - расстояние до дальней точки обзора. Относительная погреш-
ность расстояния, которая возникает из-за неопределённости углов и р2, равна 8Д =
2 К = 2 Япикс Я. В эксперименте, в котором ^Япикс * 3пкс, Япикс * 10пкс, Н = 112 мм,
Ктах ^пикс'^
Л * 6м, Ктах * 40 м, мы получаем 8А * 0.6%. Общая погрешность вычисления К складывается из погрешности определения Л и неточности, вносимой алгоритмом распознавания. В нашем эксперименте она ограничена 5%. Возвращаясь к относительной погрешности всего пройденного пути, для Я * 500 м получаем:
А5 АД + А(Л • {19р1 - 1дР2)) 2-8к- Ктах 2-0.05-40 *=Т =-5-=-5-* 500 * °-8%
На определение средней скорости будет также влиять погрешность синхронизации камер £еггог: ^Аг = ^АТ * ' р. Например, если средняя скорость равна 60 км/ч, то автомобиль пройдёт расстояние 500 метров за 30 секунд. Тогда 8ат * 4% при точности синхронизации в 1 секунду,. Для скорости 150км/ч погрешность увеличится до 10%. Добиться погрешности 8ат ^ 1% можно, если время синхронизации не будет превышать 100 мс.
В этой статье были оценены погрешности, возникающие при определении скорости движущегося транспортного средства с помощью двухкамерной распределенной системы видеонаблюдения. Используя такую видеосистему, можно оценить скорость транспортного средства с хорошей точностью, но при этом необходимо поддерживать синхронизацию между камерами. Можно достичь погрешности определения средней скорости не выше 2%, если погрешность синхронизации видеокамер не будет превышать 100 мс, а расстояние между камерами будет не менее 500 метров.
Литература
Anagnostopoulos I.E., Loumos V., Kayafas E, A License Plate-Recognition Algorithm for Intelligent Transportation System Application, Intelligent Transportation Systems, Vol. 7, Issue 3, 2006.
Для дальнейшего прочтения статьи необходимо приобрести полный текст. Статьи высылаются в формате PDF на указанную при оплате почту. Время доставки составляет менее 10 минут. Стоимость одной статьи — 150 рублей.