ИЗВЕСТИЯ РАН. ТЕОРИЯ И СИСТЕМЫ УПРАВЛЕНИЯ, 2013, № 5, с. 126-131
СЛОЖНЫЕ ТЕХНИЧЕСКИЕ СИСТЕМЫ УПРАВЛЕНИЯ И ИНФОРМАЦИОННО-УПРАВЛЯЮЩИЕ КОМПЛЕКСЫ
УДК 621.313
АЛГОРИТМ УПРАВЛЕНИЯ ГИБРИДНЫМИ МАГНИТНЫМИ ПОДШИПНИКАМИ ПО ВНЕШНЕМУ МАГНИТНОМУ ПОЛЮ © 2013 г. В. Е. Вавилов, А. А. Герасин, Ф. Р. Исмагилов, И. Х. Хайруллин
Уфа, ФГБОУВПО Уфимский государственный авиационный технический ун-т Поступила в редакцию 22.01.13 г., после доработки 26.03.13 г.
Представлены оригинальный алгоритм и способ управления положением ротора на гибридных магнитных подшипниках по картине внешнего магнитного поля. Разработан математический аппарат, обеспечивающий реализацию данного способа управления и алгоритма на практике, проведено компьютерное моделирование в программных комплексах Ansys и Maxwell. Приведены результаты экспериментальной верификации полученных теоретических выводов.
DOI: 10.7868/S0002338813050132
Введение. Наряду с централизованным электроснабжением потребителей электроэнергии перспективным является и децентрализованное, автономное электроснабжение. При автономном электроснабжении потребитель не зависит от линии электропередачи значительной протяженности, а следовательно, и от аварий, которые могут возникнуть на этой линии. Особенный интерес представляет применение автономного электроснабжения в отдаленных малонаселенных районах, например в районах крайнего севера РФ, в связи с большой протяженностью кабельных линий, сложностью ландшафта и малым числом потребителей. Также автономное электроснабжение применяется в качестве резервного на различных объектах, согласно требованиям правил устройства электроустановок.
Основным в системе автономного электроснабжения (САЭ) является генератор. Для обеспечения экономической рентабельности применения САЭ ее генератор должен обладать максимальными энергетическими показателями, необходимой надежностью при эксплуатации в экстремальных условиях и простотой конструкции. Наиболее полно сегодня представленным требованиям отвечают бесконтактные магнитоэлектрические машины (БММ) [1].
Для достижения максимальных энергетических показателей и минимизации массогабарит-ных показателей БММ приходится увеличивать частоту вращения их ротора, что в свою очередь вызывает значительное трение в подшипниковых узлах, при этом не только увеличиваются потери полезной мощности БММ, но и может произойти разрушение подшипников. Решением проблемы трения в БММ является применение в качестве подшипниковых опор гибридных магнитных подшипников (ГМП), которые состоят из магнитных подшипников на постоянных магнитах, управляемых магнитных подшипников и датчиков положения ротора (ДПР), рис. 1 [2].
Традиционно в качестве ДПР в ГМП применяются вихретоковые или индуктивные датчики, которые устанавливаются на внутренней поверхности корпуса БММ, что приводит к усложнению конструкции, технического обслуживания и ремонта БММ, так как при неисправности одного из ДПР необходимы полный останов и разборка БММ.
1. Постановка и решение задачи. Для устранения указанных выше недостатков предлагается оригинальное техническое решение для электромагнитной системы управления ГМП. Суть данного решения состоит в следующем: в качестве ДПР применяются датчики Холла, установленные непосредственно на внешней поверхности корпуса БММ, над постоянными магнитами ГМП. При возникновении смещения колец ГМП друг относительно друга происходит изменение напряженности внешнего магнитного поля (ВМП) постоянных магнитов ГМП, которое фиксируется датчиками Холла, и по ее изменению формируется управляющий сигнал, поступающий на электромагниты.
Для практической реализации предлагаемого метода важно разработать математический аппарат, подтверждаемый экспериментальными данными и компьютерным моделированием, который описывает изменение ВМП от величины смещения колец ГМП, и на основе полученного математического аппарата создать алгоритм управления ГМП.
A-A
O у
Рис. 2. Основные геометрические параметры, используемые для расчета ВМП ГМП
Изменение ВМП ГМП в зависимости от величины смещения определяется методом эквивалентного соленоида [3, 4]. Для этого ГМП условно рассекается на два сечения, каждое из которых соответствует точке измерения ВМП (рис. 2), и рассматривается как два коаксиально расположенных двухслойных соленоида конечной длины. На рис. 2 обозначены: N, S — полюса постоянных магнитов; M1, M2 — точки измерения ВМП ГМП; R1, ... R4 — геометрические радиусы постоянных магнитов; l, l1 — осевые длины постоянных магнитов; d — толщина магнитного кольца; 8 — воздушный зазор ГМП; Oxz — координатная плоскость системы координат Oxyz; Yi, Yз, Y5, Y7 — геометрические углы между нормалью, опущенной из точки (x, z) на ось Oz, и отрезком от точки измерения М1 до точек с координатами (x, z), где x = l, z e {0; d + 8; 2R1 + 2d + 8; 2R3 + d}; у2, y4, Y6, Y8 — геометрические углы между прямыми, параллельными оси Ox и проходящими через точку с координатами (x, z), и отрезком от точки измерения М1 до точки с координатами (x, z), где x = 0, z e {d, 2d + 8, 2R2 + d + 8, 2R4}; p2,p4 — геометрические углы между нормалью, опущенной из точки (x, z) на ось Oz, и отрезком от точки измерения М2 до точек с координатами (x, z), где x = 0, z e {0; d + 8} (для минимального загромождения рисунка обозначены только два угла из восьми, остальные углы определяются аналогичным образом).
Для упрощения математического анализа вводятся следующие допущения и граничные условия: величина немагнитного зазора ГМП намного меньше радиуса его кривизны; магнитная проницаемость немагнитного зазора ГМП и корпуса БММ равна проницаемости вакуума у0, магнитная проницаемость постоянных магнитов постоянна; в качестве системы координат принята декартова; используются граничные условия Дирихле [5].
2. Решение задачи. Магнитная индукция ВМП в точке измерения M1 с учетом принципа суперпозиций
Bz = ^J (cos y1 - cos y 2 - cos у 3 + cos у 4 + cos у 5 - cos у 6 - cos y 7 + cos у 8), (2.1)
128
ВАВИЛОВ и др.
где J — намагниченность постоянных магнитов ГМП. С учетом геометрических соотношений (рис. 2) составляющие выражения (2.1) определяются как
2d + 8 + h R2 + d + 5 + h + R
cosYi = ■ ; cosy2 = 1 2 1 ;
V(2d + 8)2 + li V(R2 + d + 5 + h + Ri)2 + (l - li )2
d + 5 + h 2R2 + d + 5 + h
cos Y 3 = . , ,; cos Y 4- 2 •
4(d + S + h)2 + lf V(2R2 + d + 5 + h)2 + (l - l1)
d + h R2 + d + 5 + h + R3
cos Y5 = I , , ; cos Y6~ 2 3
2
V(d + h)2 +12' V(R2 + d + 5 + h + R3)2 + (l - li )
h 2R2 + 2d + 2S + h cos Y7 = "Л;-- ; cos Y8 =-2-
2
i-, wwo Y 8 — t--
Vh2 + li2 V(2R2 + 2d + 2S + h)2 + (l - li )2
Для точки измерения M2 при отсутствии смещения в ГМП магнитная индукция ВМП определяется аналогичным образом, причем cos р1 = cos y2; cos р2 = cos у1; cos р3 = cos y4, cos р4 = cos y3, cosр5 =cos y6, cosp6 = cosy5, cosp7 = cosy8, cosp8 = cos y7. Тогда
B* = (cos y1 - cos y2 - cos y3 + cos y4 + cos y5 - cos y6 - cos y7 + cos y8). (2.2)
Таким образом
B = |B*|. (2.3)
Аналогично производился анализ для другого сечения ГМП при отсутствии смещения, в результате
B = |B*| = \BX\ = |B*|. (2.4)
При появлении смещения внутреннего магнитного кольца относительно внешнего магнитного кольца воздушный зазор представляется как функция координат г и х [6]:
8 = 80 - z cos а- х sin а, (2.5)
где а — угол между элементарными плоскостями внутреннего магнитного кольца ГМП.
Таким образом, при не нулевом смещении колец ГМП для магнитной индукции ВМП в рассматриваемых сечениях справедливо
|Bz| Ф |B*| Ф Щ Ф |B*|. (2.6)
Для визуализации полученных математических выражений были произведены расчеты в программном комплексе MathCAD ГМП со следующими геометрическими и магнитными параметрами: R4 = 21.5 мм, R3 = 14 мм, R2 = 12.5 мм, R1 = 5 мм, d = 7.5 мм, 5 = 1.5 мм, l = 5 мм, Br = 1.13 Т. При расчетах принималось, что смещение присутствует только в направлении оси г. Анализ результатов показывает, что при отсутствии смещения в точках измерения магнитной индукции ВМП ГМП при нанесении на принятую систему координат имеет вид окружности, при появлении смещения окружность трансформируется в эллиптическую фигуру.
Таким образом, на основе аналитических расчетов можно сделать вывод, что при управлении ГМП по ВМП посредством электромагнитной системы управления должно обеспечиваться такое положение ротора БММ, при котором значения магнитной индукции с датчиков Холла (их минимальное число — 4) равны. Другими словами, при нанесении значений магнитной индукции ВМП ГМП на принятую систему координат данные значения должны формировать окружность.
С целью качественной и численной проверки полученного вывода и точности разработанной математической модели было проведено компьютерное моделирование распределения электромагнитного поля ГМП при смещении и без него, а также экспериментальные исследования. При компьютерном моделировании ВМП ГМП решались двух- и трехмерные задачи. Двухмерная задача рассматривалась в программном комплексе Maxwell 14.0, трехмерная — в программном комплексе Ansys WB 13.0 на основе исходных данных, принятых при численных расчетах, с использованием граничных условий Дирихле и при следующих допущениях: электромагнитная система управления ГМП не рассматривается; окружающая среда — воздух.
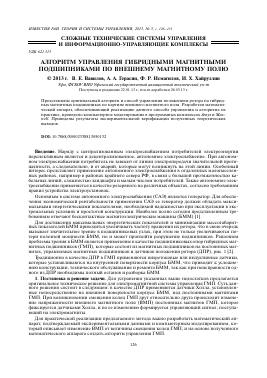
В результате моделирования были получены спектры распределения магнитной индукции ВМП ГМП (рис. 3) со смещением (слева сверху) и без смещения (справа сверху) и произведено
В[гея1а]
И2.4105е-002
2.3032е-002
2.1959е-002
2.0886е-002
1.9813е-002
1.8740е-002
1.7667е-00:
1.6594е-00:
1.5521е-00:
1.4448е-00
1.3375е-00
1.2302е-00
|1.1229е-00: 1.0155е-00 9.0824е-00 8.0093е-00 6.9363е-00
В[гея1а]
В 4.1992е-002 3.9459е-002 3.6925е-002 3.4392е-002 3.1858е-002 2.9324е-002 2.6791е-002 2.4257е-002 2.1724е-002 1.9190е-002 1.6656е-002 1.4123е-002
|1.1589е-002 9.0557е-002 6.5221е-003 3.9885е-003 1.4549е-003
Рис. 3. Результаты компьютерного моделирования ГМП
разложение индукции ВМП ГМП по осям координат без смещения (слева снизу) и со смещением (справа снизу). Анализ полученных спектров показал, что качественно они подтверждают теоретические выводы.
3. Экс
Для дальнейшего прочтения статьи необходимо приобрести полный текст. Статьи высылаются в формате PDF на указанную при оплате почту. Время доставки составляет менее 10 минут. Стоимость одной статьи — 150 рублей.