РАДИОТЕХНИКА И ЭЛЕКТРОНИКА, 2014, том 59, № 11, с. 1118-1124
ТЕОРИЯ И МЕТОДЫ ОБРАБОТКИ СИГНАЛОВ
УДК 621.391.072
АЛГОРИТМЫ СИНХРОНИЗАЦИИ ДЛЯ ПРИЕМА МОДУЛИРОВАННЫХ СИГНАЛОВ С НЕПРЕРЫВНОЙ ФАЗОЙ И ЦИКЛИЧЕСКИ ИЗМЕНЯЮЩИМСЯ ИНДЕКСОМ МОДУЛЯЦИИ
© 2014 г. А. Ю. Унгер, Г. В. Куликов
Московский государственный технический университет радиотехники, электроники и автоматики, Российская Федерация, 119454 Москва, просп. Вернадского, 78 E-mail: kulikov@mirea.ru Поступила в редакцию 19.09.2013 г.
Рассмотрены алгоритмы совместной цикловой, тактовой и фазовой синхронизации приемников модулированных сигналов с непрерывной фазой и циклически изменяющимся индексом модуляции. Алгоритмы построены на основе теории нелинейной фильтрации и являются оптимальными в смысле минимума средней квадратичной ошибки. Построена замкнутая модель системы синхронизации и проведено ее всестороннее исследование методами компьютерного моделирования.
DOI: 10.7868/S0033849414100088
ВВЕДЕНИЕ
Модулированные сигналы с непрерывной фазой (МНФ) [1] нашли широкое применение в системах спутниковой и мобильной связи благодаря уникальным спектральным и энергетическим характеристикам. Среди множества сигнальных форматов МНФ особый интерес представляют сигналы с циклически изменяющимся индексом модуляции (ЦИИМ). Использование ЦИИМ позволяет на порядок улучшить помехоустойчивость приема по сравнению с сигналами МНФ с фиксированным индексом модуляции, сохраняя компактный спектр сигнала [1]. Однако это усложняет приемник и связанную с ним систему синхронизации. Для построения такой системы и решения вопросов относительно ее оптимальности требуется строгое математическое обоснование.
В данной работе предлагается использовать результаты теории оптимальной нелинейной фильтрации для разработки связанных алгоритмов цикловой, тактовой и фазовой синхронизации сигналов МНФ ЦИИМ.
1. ОПИСАНИЕ СИГНАЛА МНФ ЦИИМ
Пусть на вход приемника поступает аддитивная смесь полезного сигнала МНФ ЦИИМ и белого гауссовского шума со спектральной плотностью мощности N
Запишем полезный сигнал МНФ ЦИИМ в комплексной форме на интервале kT + т < t < (k + 1) T + т:
s(t) = A expOW - т, Ck, Лк))ехр(/ф).
(2)
Здесь А — амплитуда, Е — энергия сигна-
ла на длительности тактового интервала Т, т — задержка, ф — начальная фаза, у — информационная составляющая фазы
y(t, Ck, hk) = hkC„q(t - iT),
(3)
i=0
r(t) = s(t) + n(t).
(1)
в которой g(t) = dq(t)/dt — функция частотного импульса, hk — один из K циклически изменяющихся индексов модуляции, Ck — информационный символ, принимающий одно из M возможных значений ±1, ±3, ..., ±(M — 1). В зависимости от длительности функции частотного импульса различают сигналы с полным откликом и сигналы с частичным откликом. Здесь и далее в отношении сигналов МНФ используется терминология из [1]. Не умаляя общности, все дальнейшие рассуждения будем проводить на примере двоичного (M = 2) сигнала МНФ ЦИИМ с двумя индексами модуляции (K = 2) с полным откликом и прямоугольным частотным импульсом
[—, 0 < t < T g(t) = \2T .
|о, t < 0, t > T
Известно [1], что сигнал МНФ ЦИИМ, у которого индексы модуляции являются рациональными числами, приведенными к общему знаме-
нателю q, определяется фиксированным числом возможных состояний на каждом тактовом интервале. Определим состояние сигнала вектором дискретных параметров 9 = (Фк, Нк, Ск), где Фк — одно из 2q фазовых состояний. Число возможных значений дискретного параметра равно п = 4^.
2. АЛГОРИТМЫ ОЦЕНКИ ЗАДЕРЖКИ, ФАЗЫ И ИНДЕКСА МОДУЛЯЦИИ
Для получения алгоритмов синхронизации воспользуемся положениями марковской теории нелинейной фильтрации дискретно-непрерывных процессов [2]. В данном случае процесс характеризуется одним дискретным 9 и двумя непрерывными параметрами т и ф. Смена значений дискретного параметра происходит на границах тактовых интервалов tk(т), которые зависят от случайной задержки. При известной задержке эти границы можно определить из соотношения
1к = кТ + т.
На разных тактовых интервалах значения дискретного параметра образуют однородную цепь Маркова с матрицей вероятностей перехода из /-го состояния в у-е Пу и вектором начальных вероятностей р/ = 1/п, /,у = 1...п.
В общем случае теория оптимальной нелинейной фильтрации для дискретно-непрерывных процессов, развитая в [2], приводит к дифференциальному уравнению в частных производных для смешанной апостериорной плотности вероятностей непрерывных параметров т и ф. Решение этого уравнения в реальном времени не представляется возможным, поэтому воспользуемся известной гауссовской аппроксимацией апостериорной плотности вероятностей [3]. При этом структура системы синхронизации определяется из системы дифференциальных уравнений для оценок задержки и фазы, а точность ее работы — из системы алгебраических уравнений для ошибок оценок.
Разберем простейшую ситуацию связи между двумя неподвижными объектами. В этом случае фазовый угол ф и временной сдвиг т сигнала можно промоделировать априорными стохастическими уравнениями [4]
й т/ йг = пт(г), й ф/йг = пф(г).
(4)
(5)
Здесь
пЛк)пМ 2) = 0.5И_8(/1 - (2),
Уравнения для оценок задержки и фазы [4], конкретизированные для условий (4) и (5), имеют вид
й т*
йг
=к
дг (г, т*, ф*) + к д г (г, т*,ф*)
дт* дф*
дг (г, т*, ф*)
й ф* = к дг (г, т*, ф*) + к йг к " дф* ^
дт*
(6)
(7)
Функция F(t, т, ф) для дискретных сигналов определяется следующим образом [5]:
Г (г, т, ф) = £ Г(г, т, ф) р(г, 0 = /| т, ф).
(8)
1=\
Здесь
р(г, 0 = /| т, ф) = р(гк + 0,0 = /| т, ф) ехр I | т, ф№ '
ЦсТ+т
(9)
£р(гк + 0,0 = ¡\ т, ф)ехр <| | г(гъ т, ф№
I=1
ЦсТ+т
— условная апостериорная вероятность 1-го значения дискретного параметра сигнала при фиксированной задержке и фазе. Выражение (9) справедливо при условии, что задержка и фаза сигнала мало меняются на длительности тактового интервала или, более формально, времена корреляции задержки и фазы много больше Т:
тх, тф > Т. (10)
Для границ тактовых интервалов определены следующие предельные соотношения:
п
р(гк + 0,0 = /| т, ф) = £ плр(гк - 0, е = Л т, ф). (11)
1=1
Уравнения (9) и (11) позволяют рекуррентно вычислять апостериорную вероятность дискретного параметра сигнала. При этом апостериорная вероятность, рассчитанная к концу текущего тактового интервала, становится априорной для следующего тактового интервала.
2
В выражении (8) определим Г (г, т, ф) =
N
хг(г^((г, т, ф), где s¡(t, т, ф) — опорный сигнал МНФ ЦИИМ, соответствующий ¡-му значению дискретного параметра.
Кроме того, необходимо найти производные от функции F(t, т, ф) по задержке Fт и фазе Fф. Для этого приведем выражение (8) к виду
ПтЙК^) = 0.5ВД1 - г2).
Г (г, Т, ф) = — ^ 1п
дг
£ р1 ехр ! | г(г1, т, ф)йг^
1кТ+т
>. (12)
Здесь Р1 обозначает априорную вероятность дискретного параметра сигнала в начале к-го тактового интервала. Меняя порядок дифференцирования, получим
Г = ^
т 31
п '
у г а^^ й
^ дт 1
' =1 кТ+т
Р1 ехр ^ |
1кТ+т
У Р1 ехр! | т,ф№[
1=1
Г
* 31
1кТ+т
(13)
п 1
У Г ^
^ J 5ф 1
1=1
кТ+т
р( ехр \ | х,ф)<^?]
1кТ+т
У Р1 ехр < | ЪфЩ
=1
(.кТ+т
(14)
—ф 2
^' ф , к ^ г + 2 К К Г + К ^ Г — 0
+ к ффг фф + 2К ффК фтг фт + к фтг тт о,
(15)
К ффК фт Гфф + К ффК тт Гфт +
+ К ^ Г + К К г — 0
+ ^ фт^фт + ^ фт^тт^тт —2х + К т2т Гтт + 2КфтКтт Гфт + К ФтГфф — 0.
Для ее решения требуется найти средние по времени значения вторых производных
Г _ дг (?, т, ф) _ дГ (?, т, ф)
дт дф
_ дГ (?, т, ф) фт дфдт
Учитывая малость апостериорных дисперсий задержки и фазы при большом отношении сиг-
нал/шум, после несложных, но громоздких вычислений, получим
Г =
-((ПА) Е \hlGl
—0Т I к к
{пС} 2(0^, (16)
— А 2
г = -—
ГТ = о.
(17)
(18)
Здесь Е{-} — оператор временного усреднения. Подставляя (16)—(18) в (15), запишем решение
№
2 Г К =
** М- тти «тип
рф/2|Гфф|, (19)
К = 0 К = _
ЛфТ ^ лтт ^т/^КттЬ "фф 'ф/^Ч^ффЬ
из которого следует, что оценки задержки и фазы некоррелированы.
Подставляя (19) в (6) и (7) и интегрируя, получим в окончательном виде алгоритмы оценки задержки и фазы сигнала в конце каждого тактового интервала
п (к+1)Т+т*
*(к) = КтУ р(к) |
кТ+т* (к+1)Т+т*
дГ(?, т*, ф*) дт*
йи (20)
дГ$, т*, ф*)
дф*
сН.
(21)
ф*(к) = К ф У р(к) |
'=1 кТ+т*
Здесь р(к) обозначает апостериорную вероят ность (9) в конце к-го тактового интервала,
Значения Ктт, Кфф, Кфт в уравнениях (6) и (7) определяются из системы алгебраических уравнений для ошибок оценок — вторых центральных моментов гауссовского распределения, аппроксимирующего апостериорную плотность вероятностей [4]
К —
4пАК т
N о
г _ 2акфф
к ф —-
Ф —о
'о о
— коэффициенты усиления в цепях слежения за задержкой и фазой соответственно.
Приемнику сигнала МНФ ЦИИМ помимо контуров тактовой и фазовой синхронизации необходим правильный индекс модуляции на каждом тактовом интервале, т.е. необходим контур цикловой синхронизации. Правило пересчета вероятностей, содержащееся в формулах (9) и (11), как раз и является таким "контуром", так как позволяет определить наиболее вероятный индекс
I *
модуляции пк.
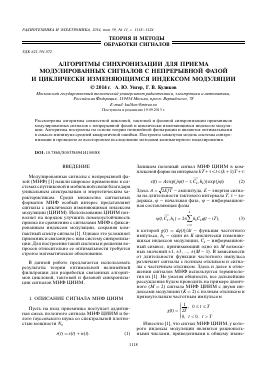
Структурная схема приемника сигнала МНФ ЦИИМ представлена на рис. 1. В схеме можно выделить отдельные контуры слежения за задержкой и фазой принимаемого сигнала, взаимодействующие между собой посредством блока вычисления апостериорных вероятностей.
3. МОДЕЛИРОВАНИЕ
Для исследования полученных алгоритмов оценки задержки, фазы и индекса модуляции воспользуемся компьютерным моделированием.
о
X
п
X
Рис. 1. Схема приемника сигнала МНФ ЦИИМ.
Модель представляет собой программу, написанную на языке высокого уровня C++. Исходными данными для программы является массив комплексных чисел, представляющих собой отсчеты зашумленного сигнала МНФ ЦИИМ, взятые с некоторой частотой дискретизации 1/Ts = N/T
rj] = sj] + nj], (22)
гдеj — последовательный номер отсчета. Здесь n j] — комплексное число, действительная и мнимая компоненты которого являются независимыми псевдослучайными нормально распределенными величинами с нулевым математическим ожиданием и дисперсией а2 = N0/Ts (Ts — интервал дискретизации). Дисперсия а2 легко определятся,
Для дальнейшего прочтения статьи необходимо приобрести полный текст. Статьи высылаются в формате PDF на указанную при оплате почту. Время доставки составляет менее 10 минут. Стоимость одной статьи — 150 рублей.