ИЗВЕСТИЯ РАН. ТЕОРИЯ И СИСТЕМЫ УПРАВЛЕНИЯ, 2013, № 3, с. 133-142
СИСТЕМЫ УПРАВЛЕНИЯ ^^^^^^^^
ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ
УДК 621.3.2.072.2
АВТОМАТИЗАЦИЯ ФОРМИРОВАНИЯ ХАРАКТЕРИСТИК В ЗАДАЧАХ ИМПУЛЬСНОГО УПРАВЛЕНИЯ СИСТЕМОЙ "УСИЛИТЕЛЬ МОЩНОСТИ-ИСПОЛНИТЕЛЬНЫЙ ДВИГАТЕЛЬ". II. ЭНЕРГЕТИЧЕСКИЕ ХАРАКТЕРИСТИКИ* © 2013 г. А. В. Кривилёв
Москва, МАИ (национальный исследовательский ун-т) Поступила в редакцию 10.08.12 г.; после доработки 22.10.12 г.
Разработан автоматизированный подход к получению математического описания энергетических характеристик произвольного импульсного метода управления системой электропривода "усилитель мощности—исполнительный двигатель". На основе предложенного подхода получены аналитические выражения энергетических характеристик импульсных режимов и методов коммутации и создана демонстрационная панель, позволяющая отображать контурные графики дополнительных потерь мощности в плоскости механических характеристик и их максимальное значение при соответствующем методе управления и импульсном режиме для текущих параметров двигателя, значения напряжения питания и периода широтно-им-пульсного сигнала. Автоматизация получения математических выражений и разработка демонстрационной панели выполнены с привлечением системы МаШеша11са.
БО1: 10.7868/80002338813030116
Введение. При проектировании приводов особое внимание уделяется энергетическим характеристикам, которые позволяют судить о потерях, полезной (механической) и потребляемой мощности, а также о продолжительности работы устройства в автономном режиме при заданном законе движения и выбранном способе управления.
В электроприводе основные преобразования энергии происходят в его исполнительном механизме, т.е. в системе "импульсный усилитель мощности—исполнительный двигатель" ("ИУМ—ИД"). В случае импульсного управления существуют следующие виды потерь: электрические потери в якорной обмотке;
электрические потери в щеточных контактах (отсутствуют в вентильных двигателях); механические потери, состоящие из потерь мощности в подшипниках, потерь трения ротора о воздух и потерь на вентиляцию;
потери в стали, которые формируются на основе потерь мощности на гистерезис и вихревые токи в магнитопроводе;
добавочные потери, вызванные неравномерным распределением магнитного поля в зазоре между ротором и статором;
потери в усилителе мощности, состоящие из потерь на переключение и потерь на проводимость;
дополнительные потери мощности, которые возникают из-за колебания тока около среднего значения в якорной обмотке двигателя.
Первые шесть видов потерь достаточно подробно рассмотрены в [1—8]. В дальнейшем считается, что сумма этих потерь, за исключением электрических потерь в якорной обмотке, менее 10% от общих потерь мощности в номинальном режиме и ими можно пренебречь. В [9, 10] приведены выражения для потерь мощности с учетом дополнительных потерь мощности и коэффициента использования двигателя при первом и втором импульсных режимах. В [11] представлены аналитические выражения для дополнительных потерь мощности, связанных с пульсациями тока в якорной обмотке, при первом и втором импульсных режимах, получены приближенные выражения для дополнительных потерь мощности и потребляемой мощности при пятом им-
* Работа выполнена при финансовой поддержке РФФИ (проект № 12-08-01045-а).
пульсном режиме. В [12] показано влияние методов коммутации на величину общих потерь мощности.
С учетом вышеизложенного отсутствуют единый автоматизированный подход к оценке дополнительных потерь мощности при произвольном методе коммутации и математические выражения для энергетических характеристик импульсных режимов и ряда методов коммутации. Для получения необходимых аналитических выражений и автоматизации соответствующего этапа проектирования электропривода следует разработать автоматизированный подход к получению математического описания энергетических характеристик, их построению и определению максимального значения дополнительных потерь мощности при произвольном методе коммутации и текущих значениях параметров двигателя и частоты широтно-импульсного сигнала (ШИС). В том случае если максимальное значение дополнительных потерь мощности не превышает 10% от электрических потерь в якорной обмотке, то этими потерями можно пренебречь при проектировании электропривода с импульсным управлением.
1. Описание предлагаемого подхода. Предлагаемый подход состоит из следующих шагов:
составление для каждого импульсного режима дифференциальных уравнений;
получение аналитических описаний потерь мощности с учетом дополнительных потерь для каждого импульсного режима;
получение математических описаний механической и потребляемой мощности для каждого импульсного режима;
объединение соответствующих описаний дополнительных потерь мощности, механической и потребляемой мощности импульсных режимов, которые имеют место в рассматриваемом методе коммутации;
формирование демонстрационной панели, позволяющей исследовать изменение дополнительных потерь мощности в плоскости механических характеристик и определить их максимальное значение при заданных параметрах двигателя, частоте ШИС и выбранном методе коммутации.
При получении аналитических выражений были приняты следующие допущения: активные и индуктивные сопротивления ключевых элементов (КЭ) равны нулю; сопротивления контуров протекания тока одинаковые и постоянные на периоде ШИС. Автоматизация получения математического описания и создание демонстрационной панели были реализованы при помощи системы Mathematica.
2. Первый импульсный режим. Система дифференциальных уравнений для цепи якоря на периоде ШИС
Г±^ПИт = Rii(t) + Li'i(t) + ceQcp при 0 < t<
10 = RiII(t) + Li'II(t) + ceQCP при ta < t < T,
где QCP — среднее значение скорости вращения в установившемся режиме; ?и — время импульса ШИС; iI, iII — соответственно мгновенные значения тока якоря при единичном и нулевом значении ШИС; R, L — активное и индуктивное сопротивление якоря соответственно; ce — коэффициент противо-ЭДС. Таким образом, при единичном значении ШИС на обмотку якоря подается напряжение источника питания ипит, полярность которого соответствует желаемому направлению вращения, а при нулевом значении — обмотка якоря закорочена.
Потери мощности в случае импульсного управления состоят из основных и дополнительных потерь и вычисляются согласно следующей формуле: Рпот* = Мнн, + АР^, где Mm и АР^ — соответственно момент нагрузки и дополнительные потери в относительных единицах. Дополнительные потери мощности с учетом (2.1) определяются как
AP* = у - у2 - — = Y - Y2 - 2 csch-*sh^sh(1 - Y) Тя, (2.2)
Тя тя 2 2 2
где тя = Т/Тя — относительная длительность периода ШИС; Тя — электромагнитная постоянная времени якоря; у — скважность ШИС; А= А1/1п — амплитуда пульсации тока в относительных
единицах; 1п — пусковой ток; csch х = 1/sh х — гиперболический косеканс.
2.0
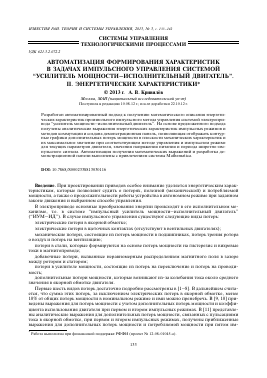
Рис. 1. Максимальные дополнительные потери мощности
Дополнительные потери мощности, согласно (2.2), зависят от скважности и периода ШИС. При у = 1 и 0 дополнительные потери АР^ = 0, а при у = 1/2 они достигают своего максимального
значения, которое определяется как
А Ртах* = 1 - ^ = 1 - 1Ш Iя, (2.3)
где А/тах* = А/тах//п — максимальное значение амплитуды пульсации тока в относительных величинах.
На рис. 1 показан график изменения максимального значения дополнительных потерь мощности в зависимости от относительной длительности периода ШИС (2.3), согласно которому при импульсном режиме I дополнительные потери мощности составят 10% от потерь мощности в двигателе в номинальном режиме (Мн = 0.1Мп) в случае тя » 0.43.
Зависимости отношения АР^/АРтах^ от скважности и среднего значения электродвижущего момента Мср^, а также от Мср* и средней угловой скорости Пср* (в плоскости механических характеристик) показаны в виде поверхности и контурного графика на рис. 2, а и б соответственно.
Механическая (полезная) мощность на валу двигателя в относительных величинах определяется посредством выражения
Рмех* = Мер*ПСР* = Мер*(иср* - Мер*), (2.4)
Рис. 3. Дополнительные потери мощности (АР^/АРтах^) при импульсном режиме II
где = ±у — среднее значение напряжения на якорной обмотке в относительных единицах. В установившемся режиме работы MCP^ = Мн^. Для вычисления потребляемой мощности используется следующее выражение:
Pcp* = ± YМн* + y - y2 - - cschl*shlE-sh^i-Iíl-.
T я 2 2 2
3. Второй импульсный режим. При импульсном режиме II на якорную обмотку поступают раз-нополярные импульсы напряжения питания
1±ипит = Rh(t) + LiI(t) + с,QCP при 0 < t < tи, (3 1)
1-ипит = Rill(t) + Lili(t) + с,QCP при tи < t < T.
Система (3.1) учитывает два возможных варианта подачи импульсов.
Дополнительные потери мощности определяются согласно выражению
Ap* = 4(у - Y2 - 2 csch^shYT-sh —. (3.2)
С учетом выражения (2.2) дополнительные потери мощности при импульсном режиме II в 4 раза превосходят дополнительные потери мощности при импульсном режиме I. Следовательно,
APmax* = 1 - 4 thIя. (3.3)
Тя 4
Отношение ДР*/ДРтах* в плоскости механических характеристик в виде контурного графика представлено на рис. 3.
Механическая мощность рассчитывается согласно (2.4), где иСР* = ±(2у — 1). Для вычисления потребляемой мощности следует пользоваться выражением
РСР* = ±(2т - 1 )Мн* + 4Гу - у2 - 2 С8СЬ(1" У)т
тя 2 2 2
^CP*
-1.0 -0.5 0 0.5 1.0 MCSJW*
Рис. 4. Дополнительные потери мощности (ЛР#/ЛРтах#) при импульсном режиме III
4. Третий импульсный режим. Система уравнений импульсного режима III ± ипит = Щ (г) + Д (г) + ^ □ СР при 0 < г < г и,
- ипит = Я'п(г) + Х/П(0 + ^СР при ги < г < го,
о = л/ш (г) + х/щ (г) + се^СР при г0 < г < г,
(4.1)
где /0 — промежуток времени с начала периода ШИС до момента, когда ток в якоре меняет свой знак при нулевом значении ШИС (имеется в виду передний фронтальный ШИС). Интервал времени /0 определяется как
t о = Ta ln-
2 е
УТя
1
1 ±Qcp*(1 - е" я) На базе (4.1) вычисляются дополнительные потери мощности
АP* = 4у( 1 - у) + то(1 - то - 4у) - I csch IяГ3 chЬ +
т я 2 V 2
+ ch т я ( 22 т о - 1 ) - 2 Г ch т я ( 1 - 2 Y ) + ch
Для дальнейшего прочтения статьи необходимо приобрести полный текст. Статьи высылаются в формате PDF на указанную при оплате почту. Время доставки составляет менее 10 минут. Стоимость одной статьи — 150 рублей.