ПРОБЛЕМЫ МАШИНОСТРОЕНИЯ И НАДЕЖНОСТИ МАШИН
№ 6, 2014
УДК 621.01.531.8
© 2014 г. Сергеев В.И.
ДИНАМИКА ЛОБОВЫХ ФРИКЦИОННЫХ МЕХАНИЗМОВ (ВАРИАТОРОВ СКОРОСТИ)
Институт машиноведения им. А.А. Благонравова РАН, г. Москва
Рассмотрен ряд особенностей лобовых фрикционных механизмов с цилиндрическими центройдными схемами и внешнем соприкасании колес, что обеспечивает плавное непрерывное изменение передаточного отношения механизма. Решение общих вопросов динамики, связанных с выбором величин параметров механизма, основано на постановке "задачи Вышнеградского".
В теории механизмов и машин вариаторы выделяются в особый класс механизмов вследствие наличия в их структуре высшей кинематической пары качения, связь между элементами которой обеспечивается силами трения [1, 2]. К группе этого класса механизмов относятся лобовые цилиндрические центройдные их схемы с внешним соприкосновением колес, что обеспечивает плавное и непрерывное изменение передаточного отношения механизма. Классификация механических вариаторов с жестким промежуточным звеном, включающая лобовые, шариковые, торцевые, многодисковые механизмы, приведена в работах [3, 4]. Входящая в структуру механизма кинематическая пара качения в общем случае определяет неголономную связь между обобщенными координатами, вид которой позволяет рассматривать ряд специфических функциональных возможностей механизма.
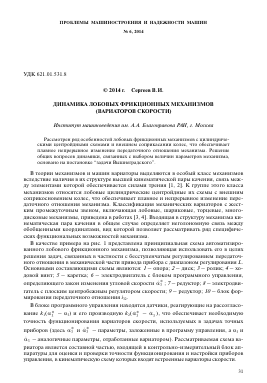
В качестве примера на рис. 1 представлена принципиальная схема автоматизированного лобового фрикционного механизма, позволяющая использовать его в целях решения задач, связанных в частности с бесступенчатым регулированием передаточного отношения в механической части привода прибора с диапазоном регулирования L. Основными составляющими схемы являются: 1 — опора; 2 — диск; 3 — ролик; 4 — ходовой винт; 5 — каретка; 6 — электродвигатель с блоком программного управления,
определяющего закон изменения угловой скорости а* ; 7 — редуктор; 8 — электродвигатель с плоским центробежным регулятором скорости; 9 — редуктор; 10 — блок формирования передаточного отношения i32.
В блоке программного управления находятся датчики, реагирующие на рассогласование k:( а* — а3) и его производную k2( а* — а3), что обеспечивает необходимую точность функционирования вариаторов скорости, используемых в задачах точных приборов (здесь а* и а* — параметры, заложенные в программу управления, а а3 и а3 — аналогичные параметры, отработанные вариатором). Рассматриваемая схема вариатора является составной частью, входящей в контрольно-измерительный блок аппаратуры для оценки и проверки точности функционирования и настройки приборов управления, в кинематическую схему которых входят встроенные вариаторы скорости.
1 4
-L
lo
F [1]
1
г
1 2 3 т
1 P/R
Рис. 1
Рис. 2
К особенности конструкции фрикционных механизмов (рис. 1) отнесем наличие в их структуре кинематической пары (2—3), для элементов которой характерно относительное скольжение, определяемое коэффициентами ^ = 0,01^0,04 и ^ = 0,001^0,003, что учитывается при решении задач в областях машиностроения [1, 2] и точного приборостроения [5] соответственно. Поскольку величина ^ в последнем случае становится соизмеримой с полями допусков на изготовление звеньев кинематических цепей, то ее влияние на функционирование механизма рассматривается в иной постановке задачи [6].
В условиях кинематической постановки задачи [1, 2] в процессе ее решения предполагается соблюдение равенств а* = а3 и а* = а3, вследствие чего отрабатываемое механизмом передаточное отношение определяется так
32
= а3/а2 = ка4,
(1)
где а4 — угол поворота ходового винта 4, к = h/R — постоянная фрикционного механизма, h — шаг ходового винта, R — радиус ролика 3.
Задавая а4, вид аналитической функции F(a4) представим (1) следующим образом
i32 = а3/а2 = кДа4).
(2)
При динамической постановке задачи учтем ее особенность — движение кинематической цепи механизма включает в свою структуру идеальные голономные и неголо-номные связи, вследствие чего воспользуемся обобщенными уравнениями Лагранжа 2-го рода с множителем [7]
dtdqj
?! = q + Х( & + &
dqj ydqj dq}
(3)
где Т — кинетическая энергия системы; Ql — обобщенные силы; qj и — координаты и скорости; X — лагранжев множитель; 5 — уравнение неголономной связи.
Примем во внимание следующее: при идентичности исходных компоновок схем автоматизированных фрикционных механизмов между рассмотренной в [8] и решаемой задачами имеются существенные различия — наличие блока 10, что накладывает ряд специфических требований, основанных на технических условиях, определяющих
0
постановку решаемого круга задач. Согласно [8] система дифференциальных уравнений (3) после исключения из них множителя X приводится к виду
/2 а2 + /Зк а4а3 + к с3а 4а3 = а м ^ ^), (4)
/4 <з34 + с2 (Х4 — /2 { т02[ к1 (а7
— аз) + к2((Х7 — (Х3)]},
где т01 и т02 — удельные пусковые моменты электродвигателей 8 и 6 соответственно.
Уравнение неголономной связи в кинематической паре (2—3) механизма запишем так
5 — аз — ка4а2 . (5)
Система дифференциальных уравнений (4) и (5) является общей в том числе и для рассмотренных возможностей постановок ряда прикладных задач.
В [8] показано, что при подключении к электродвигателю 8 плоского центробежного регулятора в совокупности с применением соответствующих приемов регулировок можно добиться точности стабилизации угловой скорости а2 порядка 0,1%. Это поз-
• .0 о о
воляет при решении прикладных задач полагать а2 = а2 = ю2 , где ю2 — номинальная угловая скорость электродвигателя 8. Кроме того, в кинематической цепи (6—7—4—5—3) находится редуктор 7 с передаточным отношением ;2 = 0,01, позволяющим считать наличие условий, удовлетворяющих свойствам фильтра [8].
Обратим внимание на обстоятельство, связанное с решением рассматриваемой задачи. В соответствии с заданными техническими условиями передаточное отношение проектируемого механизма (2) с бесступенчатым регулированием скорости аз должно осуществляться в диапазоне Ь = 1—6. Это приводит к существенному повышению инерционности кинематической цепи (8—9—2) и как следствие к неравенству /3//2 1. Отмеченное обстоятельство (например, радиальное перемещение ролика 3 относительно диска 2) снижает влияние неголономной связи на решение системы уравнений (4) и (5). Кроме того примем во внимание нестабильность величины коэффициента ^ при малых значениях р < 1 и одновременно форму задания Ь, согласно которой начальная величина р0/В = 1 (р0 = В).
В соответствии с изложенным система дифференциальных уравнений (4) и (5) приводится к виду [8]
яоа4 + а, а4 + а2 а4 + а3а4 — В( г), (6)
Т 0 . , 0 . ,
где а0 = J4, а: = с2, а2 = ки2 12т02к2, а3 = кю212т02к1.
Основываясь на соображениях, изложенных в [8], были осуществлены решения системы уравнений (4), (5) и уравнения (6) для ряда вариантов задачи, сопоставление которых оказалось лежащим в пределах 0,2^1,3%, что позволяет судить о качественных возможностях расчета параметров рассматриваемой кинематической цепи механизма.
Соответствующее (6) характеристическое уравнение представим так
32
а0г + а,г + а2г + а3 — 0. (7)
Вопросы исследования динамической системы, описываемой уравнением (6), рассмотрим в рамках "задачи Вышнеградского" [9], где (7) преобразовано к виду
Г + Лг2 + Вг + 1 — 0, (8)
где
Л — —1—, В — —(9)
а0а
03
коэффициенты Вышнеградского (обобщенные параметры).
2 ПМ и нм, № 6
33
Устойчивость системы третьего порядка (8) характеризуется следующими неравенствами A > 0, B > 0, ЛБ > 1, на основе которых построена гипербола с координатами A и B (ЛБ = 1), определяющая границу области устойчивости [9].
Независимая переменная в задаче Вышнеградского т связана с независимой переменной ? следующим образом
з.
т = 3 -1. (10)
К
Характеристическое уравнение (8) в области устойчивости определяет следующие варианты: а) три корня вещественные отрицательные r1 = —у1; r2 = —у2, r3 = —у3.
Решение для переходного процесса представим так
а4 = С1 eYlT + C1ell% + Сге1ъ %, (11)
где С1; С2, C3 — произвольные постоянные; т — независимая переменная (10).
б) Один корень вещественный отрицательный rl = —у: и два комплексные с отрицательной вещественной частью r2 3 = —у2 ±_/ф. Решение для переходного процесса имеет вид
—у^т —'У2Т
а4 = С1 e + C2e sin (фт + С3). (12)
Диаграмма Вышнеградского, представленная в частности в [9, 10], в системе координат A и B (9) разделена на три зоны: монотонного процесса (11); периодического сходящегося процесса (12); апериодического процесса при наложении ряда ограничений [9] на C и C2.
В соответствии с (9) обобщенные параметры A и B для рассматриваемой задачи представим следующим образом:
0. ,
A = _--2_ B = К Ю 21 2 m 02k2 (13)
3J24 кю2^2 m02k1 3//4 (K®0¿2mo2k1)2
При проведении расчетов использованы паспортные данные электродвигателей СЛ-121 и СЛ-321, установленных соответственно в кинематических цепях (6—7—4—5—3) и (8—9—2), а также ряд параметров автоматизированного механизма, определяющих его конструкцию с блоком управления. В соответствии с этим были определены обобщенные параметры (13) A¡ = 1,5 и B¡ = 2,0.
Согласно диаграмме Вышнеградского [9, 10] полученные величины A: и B¡ определяют переходный процесс вида (12).
Отметим фактор, связанный с процессом проектирования механизма, основанный на использовании диаграммы Вышнеградского. Например, переходный сходящийся колебательный процесс (12) не удовлетворяет по тем или иным обстоятельствам постановку задачи. Тогда в соответствии с (13) можно рассмотреть возможность изменения коэффициента усиления к2 в блоке управления 6в целях увеличения обобщенного параметра B, например, до величины Bl = 2,7. Вследствие чего значения A2 = 1,5 и B2 = 2,7 согласно диаграмме Вышнеградского приведут к монотонно изменяющемуся переходному процессу вида (11). Одновременно произойдет изменение в части формирования показателя точности отработки аз в блоке управления 6 и соответственно i32 (2), что является существенным фактором в ряде прикладных задач.
Оценку качества переходного процесса, описываемого уравнением (6) при /[1],
Г 2 2 .2
(а4 + е а4)йт (е = 0,2), кот
Для дальнейшего прочтения статьи необходимо приобрести полный текст. Статьи высылаются в формате PDF на указанную при оплате почту. Время доставки составляет менее 10 минут. Стоимость одной статьи — 150 рублей.