МЕХАНИКА ТВЕРДОГО ТЕЛА № 2 • 2014
УДК 531.383
© 2014 г. Д. А. СУХОРУЧКИН
ДИНАМИКА СТРУННОГО МАЯТНИКА.
УПРАВЛЕНИЕ В РЕЖИМЕ ОДНООСНОГО ГИРОСКОПА, СВОБОДНОГО В АЗИМУТЕ
Рассмотрена реализация обобщенного маятника Фуко, в которой основными механическими элементами являются массивный твёрдый шар и две невесомые струны. Построена двумерная электромеханическая модель гироскопа. Сформированы каналы съема инерциальной информации и каналы управления колебаниями. Показана устойчивость отсчетного многообразия при выбранном режиме управления.
Ключевые слова: струнный гироскоп, обобщенный маятник Фуко, датчик угла поворота
1. Введение. В течение нескольких последних десятилетий появился ряд теоретических, экспериментальных и практических разработок гироскопических приборов, которые можно объединить в группу под названием "обобщенный маятник Фуко". К ним относятся волновой твердотельный гироскоп (полусферический кварцевый резонатор) [1—3], кольцевой гироскоп [4], квапазон [5], струнный гироскоп [6—7] и некоторые другие. Во всех указанных приборах в рабочем режиме поддерживается одна из форм собственных колебаний упругой среды, обладающей осевой симметрией. Математическое описание колебаний по выбранной форме приводит в конфигурационном пространстве к уравнениям двумерного управляемого осциллятора [8].
В данной работе исследуется одна из реализаций струнного гироскопа, в которой основными механическими элементами являются массивный твердый шар и две невесомые струны. В идеальном случае прямолинейные колебания, совершаемые центром шара, не изменяют своей ориентации относительно инерциального пространства, несмотря на вращение основания вокруг оси прибора. Другая возможная реализация предполагает в качестве чувствительного элемента однородную массивную струну, в которой поддерживается плоская стоячая волна. В идеальном случае стоячая волна не вовлекается вслед за основанием во вращение вокруг оси прибора и остается неподвижной в инерциальном пространстве.
Струнный гироскоп обладает рядом отличий от остальных приборов указанного класса: его коэффициент Брайана [8] равен единице; конфигурационное пространство системы совпадает с геометрической плоскостью, в которой происходят колебания центра шара или средней точки струны; центр масс системы принципиально не может быть неподвижным относительно основания прибора.
В то же время струнный гироскоп в "шаровой" реализации может быть рассмотрен как первая форма колебаний волнового твердотельного гироскопа (ВТГ), при которой совершаются не изгибные колебания оболочки резонатора, а смещения оболочки как твердого тела. Это позволяет применить к струнному гироскопу некоторые результаты, полученные при разработке алгоритмов управления ВТГ. Преимущество струнно-
го гироскопа по сравнению с ВТГ в том, что требования к точности изготовления твердого шара менее жесткие, чем аналогичные требования для упругого полусферического резонатора. Недостатком же струнного гироскопа является большая подверженность линейным вибрациям основания из-за подвижности центра масс.
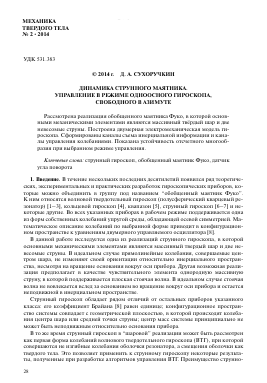
2. Линейные уравнения относительного движения шара, прикрепленного двумя струнами к подвижному основанию. Рассмотрим однородный шар радиуса Я и массы т, к которому в диаметрально противоположных точках N и & прикреплены две одинаковые невесомые струны (фиг. 1). Другие концы струн N и & жестко заделаны в основание, произвольным образом движущееся относительно инерциальной осей системы координат С}Х}У^\. С основанием связана декартова прямоугольная система координат Оху£. ее начало О совпадает с положением равновесия центра С шара при неподвижном основании, ось О1 проходит через точки N и &". Движение основания характеризуется скоростью иО и ускорением wO точки О, угловой скоростью ю и угловым ускорением (О. Положение шара относительно основания задается координатами х, у, 7 центра С и углами Крылова-Булгакова а, Р, у [9]. Если основание неподвижно, то положение равновесия шара соответствует нулевым значениям обобщенных координат х, у, 7, а, Р, у; при этом струны не закручены, имеют одинаковую длину I и силу натяжения Т0. Действием силы тяжести и других активных сил пренебрегаем. Полагаем, что при движении шара деформация струн сводится к их растяжению и кручению.
Составим уравнения относительного движения шара методом Лагранжа. Кинетическая энергия абсолютного движения находится по теореме Кёнига:
Т = 1 /2ши2с + 1/2/&а (2.1)
Здесь I — момент инерции шара относительно произвольной центральной оси; uC и юа — скорость центра C и угловая скорость шара в его абсолютном движении, выражающиеся через соответствующие характеристики uCr, юг относительного движения:
uc = uo + W х OC + vCr, wa = w + wr (2.2)
Векторы в правых частях формул (2.2) имеют следующие проекции на оси, связанные с основанием:
и о = (uox ,Uoy ,Voz ), ra = (ю *, ю y, ю z), OC = (x, y, z), и cr = (x, y, z), (23)
rar = (tí + y sin в, в cos a - y sin a cos в, в sin a + y cos a cos в)
Записав равенства (2.2) через проекции (2.3) и подставив uC и ю^ в (2.1), получим выражение для кинетической энергии шара:
T = m [(Uox + ®yi - «z. + x) + (Uoy + «i* - ®xi + y)2 + (Uoz + «x. - ®yX + if] +
2 (2.4)
I 2 2 2
+ ~ [(«* + <á + YsinP) + («y +pcosa - ysinacosP) + («z + psina + ycosacosP) ]
Равенство (2.4) можно переписать в виде T = T(2) + T(1) + T(0), выделив формы второй, первой и нулевой степени по обобщенным скоростям X, y, z, a, (3, у. Отметим, что форма T(2) обусловлена относительным движением шара, форма T(0) — движением основания относительно инерциального пространства, а форма T(1) — обоими указанными движениями.
Для вывода линейных уравнений движения шара достаточно удержать в выражении для кинетической энергии члены до второго порядка включительно по обобщенным координатам и обобщенным скоростям:
m 222
T = -[(Uo* +«yi-«zy + X) + (Uoy +«iX-«xi + y) + (Uoz +«*y-«yX + z) ] +
J (2.5)
+ 2 [(«x + OX)2 + («y + в)2 + («z + y)2]
Получим выражение для потенциальной энергии системы, определяемой растяжением и кручением струн. При смещении шара из положения равновесия струны NN и SS' испытывают, вообще говоря, различные удлинения и имеют различные углы закручивания. Помимо этого при полном исследовании необходимо учитывать зависимость крутильной жесткости c¡ струны от ее натяжения. Однако основной интерес, с точки зрения построения гироскопического прибора, представляют малые колебания шара в окрестности положения равновесия. Поэтому сделаем допущение, что углы закручивания струн одинаковы и равны обобщенной координате у, а крутильная жесткость ct постоянна и определяется силой T0 натяжения струн в положении равновесия. Для потенциальной энергии имеем равенство:
П = 2 (NN - lo)2 + 2 (SS - lo)2 + с,у2 (2.6)
Здесь l0 — длина недеформированной струны, c — ее коэффициент жесткости на растяжение.
Переменные длины струн NN и SS зависят от координат x, y, z центра C шара и углов a, Р, у, через которые выражаются матрицы поворотов
А™ —
1 0 0 0 cos а - sin а 0 sin а cos а
А р —
cos в 0 sin в 0 1 0 - sin в 0 cos в
А у —
cos у - sin у 0 sin y cos y 0 0 0 1
(2.7)
Использована пассивная точка зрения на ортогональное преобразование, когда каждая матрица рассматривается в поворачиваемом ею базисе, а матрицы последовательных поворотов перемножаются в прямом порядке [9].
Записав матрицу результирующего поворота А = А а Ар А у, выразим векторы CN = = ДО, О, Я)Т, CS = А(0, 0, —Я)Т, и получим координаты векторов NN = ON' - OC - CN, SS' = OS' — OC — CS, определяющие длины струн при произвольном положении шара:
NN'+ R sin в) + (y - R sin a cos в) + (l + R - z - R cos а cos в) SS' = (x - R sin в) + (y + R sin а cos в) + (-l - R - z + R cos а cos в)
(2.8)
Потенциальная энергия (2.6) с учетом формул (2.8) представляется выражением, которое следует разложить в ряд по степеням обобщенных координат. В разложении удержим члены до второго порядка включительно, отбросим постоянные члены и используем величину Т0 = с (I -10) — силу натяжения струны в положении равновесия при неподвижном основании. Потенциальная энергия примет вид
П = ^(x2 + y2) + cz2 + T° R (R + l )(а2 +Р2) + ct y 2
(2.9)
Далее воспользуемся выражениями для ускорения точки О и углового ускорения основания через относительные производные по времени от скорости точки О и от угловой скорости основания:
Wo =
du dt
+ w x и
O'
■ d w d w (O = — + w x w = -
dt dt
(2.10)
Составим дифференциальные уравнения движения в форме Лагранжа, используя выражения (2.5), (2.9), а также формулы (2.10), записанные в проекциях на оси системы Oxyz. Получим шесть линейных уравнений, из которых первые три составляют систему, определяющую движение центра масс шара, а каждое из трех последних уравнений описывает изменение соответствующего угла:
Í2T 2 2 ^
x + 1 —0 -юУ -®2 I x + (юхюу -юz )y + (o]xaz + юy )z + 2 (®yZ -&zy) + wOx = 0 V ml )
y + (юхюу + юz )x + -ю2 -ЮХ j У + (®y®z - юx )z + 2 (®ZX - ®x¿) + wOy = 0
Z + (®x®z - юу)x + (®y®z + юХ)y + (— - юХ - ю2
m
)y + (-®X )Z + 2(y-®yX) + woz = 0 (2.11) m
a +
2TnR I R \ „ n 2T 0
+ — )а + юХ = 0, p + —0
I
2T0RL R\a .
i (1 + R Г+® у = 0
•• 2ct . r, Y + -j- y + ю z = 0
Подчеркнем, что уравнения (2.11) отвечают идеальной системе, в которой учитывается только движение основания и действие струн. Вопросы, связанные с наличием
диссипации энергии, анизотропией упругих свойств и так далее, относятся к анализу погрешностей и в данной работе не рассматриваются.
3. Двумерная электромеханическая модель гироскопа. Систему уравнений (2.11) следует применять в том случае, когда на движение основания и на относительное движение шара не накладываются никакие ограничения, кроме тех, которые позволяют использовать линейное приближение. Однако для разработки данного гироскопического прибора не все движения шара и основания имеют одинаковое значение. Вращение основания вокруг оси Oz и движение центра шара в плоскости Oxy (фиг. 1) следует отнести к основным движениям, другие движения — к второстепенным. Поэтому далее полагаем:
1) ио = 0, юх = юу = 0, юг = юг(?), т.е. основание участвует лишь в
Для дальнейшего прочтения статьи необходимо приобрести полный текст. Статьи высылаются в формате PDF на указанную при оплате почту. Время доставки составляет менее 10 минут. Стоимость одной статьи — 150 рублей.