Б01: 10.12731/^^-2015-10.1-20 УДК 631.3.023
ДВИЖЕНИЕ
по криволинейной поверхности ведущего колеса c упругодемпфирующим
приводом
Поливаев О.И., Шацкий В.П., Бабанин Н.В.
Повышение скоростей движения тракторных агрегатов приводит к увеличению вертикальных ускорений корпуса трактора, что повышает утомляемость тракториста, а также отрицательно сказывается на прочности деталей трактора, ухудшая при этом тяговые качества и агротехнические показатели.
В настоящей работе определяется величина вертикального ускорения ведущего колеса, оборудованного газогидравлическим приводом, при движении через криволинейное препятствие, позволяющая сравнить упругодемпфирующий и заводской приводы тракторов класса 1.4. При их сравнении выявлено снижение вертикальной скорости колеса трактора, что приводит к снижению интенсивности колебаний на рабочем месте оператора. Снижение амплитуды воздействия неровностей уменьшает динамические нагрузки на ходовую часть.
Новизной работы является разработка математической модели процесса движения заднего ведущего колеса по криволинейной поверхности, позволяющая получить массивы данных вертикальных ускорений колеса трактора. На основании анализа полученных результатов установлено, что установка упругодемпфирующего привода в ведущем колесе на заезде на неровность позволяет снизить его вертикальные ускорения до 70...80 %.
Ключевые слова: Вертикальные; ускорения; криволинейные препятствия; итерационный метод; упругодемпфирующий привод.
raising RIDE tractors of 1.4 as it moves through a curved obstacle to the elastic-damping drive
Polivaev O.I., Shatskiy V.P., Babanin N.V.
In this paper we define the vertical acceleration of the driving wheel equipped with gas-hydraulic drive, with motion-zhenii through curvilinear obstacle allows to compare the elastic-damping and serial drives tractor class 1.4. With their comparison-Research Institute showed a reduction in vertical speed wheel tractor that sup- ply leads to a decrease in the intensity of the vibrations at the operator. Snee-zhenie amplitude reduces the dynamic effects of irregularities LOAD-ing to the undercarriage.
The novelty of the work is to develop a mathematical model of processes sa motion rear wheel drive on the curved surface, item-Will receive datasets vertical acceleration wheel truck-torus. Based on the analysis of the results revealed that the mouth-Novka elastic-damping drive in the drive wheel on arrival on ers-ness to reduce its vertical speed up to 70... 80%.
Keywords: Vertical; acceleration; curvilinear obstacles; iterative method; elastic-damping drive.
введение
Повышение производительности тракторов возможно в первую очередь за счет увеличения скоростей движения. Повышение скоростей движения тракторных агрегатов приводит к увеличению вертикальных ускорений корпуса трактора, что повышает утомляемость тракториста, а также отрицательно сказывается на прочности деталей трактора, ухудшая при этом тяговые качества и агротехнические показатели [1, 2, 3, 4].
теоретический анализ
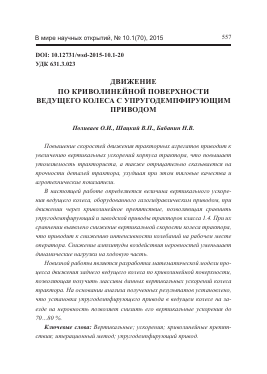
Схема сил, действующих на колесо, представлена на рисунке 1.
рис. 1. Определение момента сопротивления при движении по криволинейной поверхности колеса, оборудованного УДП
Для определения момента сопротивления составим уравнение моментов сил относительно точки А:
М^К^аъ + пщ&та-Гъ (1)
где ак - смещение нормальной реакции из за деформации шины и почвы, м; N1 - нормальная реакция от взаимодействия колеса с почвой, Н; т -масса трактора, кг; гк - радиус колеса трактора, м; Деформация шины и почвы не показано, но учтено смещение нормальной реакции почвы N1 на величину ак.
Для определения N1 составим уравнение проекций сил на ось у:
N1-Fa- mg cos a = 0, откуда N1=Fn+ mg cos a. Здесь - центробеж-„ mV2 „
ная сила, равная F =-, где V - скорость колеса, р - радиус кривизны
р - А 0 + Уа)ш
траектории движения колеса, определяемый по формуле р = -——, где
y' - первая производная криволинейной поверхности единичной неровности, y" - вторая производная криволинейной поверхности единичной неровности, подставляя полученные выражения в формулу (1), получаем
,, . mV2 -у" ч
с = (1 + y'2 f2 +mgcosa^'ak+ mSsina • rk
Вводя понятие коэффициента сопротивлению качения f = —, получаем [1] к
—j^^ + mgco&a.) • f • rk + mgsma. • гк
Используя известные формулы: sin a = , : и cosa = . ^ , а
Vl + íg2a ^l + tg2a
также тот факт, что tga = у', уравнение (2) преобразуется к виду:
Отметим, что момент сопротивления является функцией от скорости движения колеса Мс = /i(V). С другой стороны, при использовании УДП скорость также является функцией момента сопротивления V = /2(А/С) [2]. Таким образом, мы приходим к уравнению: Мс = /¡(./^(AfJ), или
МС=/(МС). (4)
Это уравнение решается классическим итерационным методом: задается некоторое начальное значение момента сопротивления, по которому по формуле (4) вычисляется следующее значение, которое, в свою очередь, подставляется в правую часть уравнения (4) и так далее до тех пор, пока разница между последующей и предыдущей итерацией не становится меньше некоторого заданного значения. Пошаговое решение уравнения (4) дает возможность определить массивы значений скоростей и моментов сопротивления в каждой точке выбранной горизонтальной сетки. Аппроксимация массива значений скоростей позволяет определить
функциональную зависимость скорости от горизонтальной координаты движения: V = ^(х). Умножение на синус угла касательной к оси х дает функцию изменения вертикальной скорости от горизонтальной координаты V = У(х) • У _ Полученная функция несет информацию об
VI + У(х)2
изменении вертикальной скорости, что в сравнении с изменением вертикальной скорости колеса без применения УДП, позволит увидеть преимущество предлагаемой конструкции. Следующим этапом является определение вертикальных ускорений ведущего колеса. В криволинейном движении одним из ускорений является касательное ускорение, величина которой равняется производной от величины скорости по времени. Для определения этого ускорения вычислим в каждой точке сетки неровности рисунок 2 отношение элементарного пути на среднюю скорость движения на данном участке, что даст возможность определить элементарный отрезок времени, за который пройден данный участок. Элементарный путь может быть определен как длина дуги за промежуток времени от t. до + 1 по формуле: = + а средняя скорость по формуле: ЛГ = 0.5-(^+1 + ^). Таким образом, элементарный отрезок времени, за который пройден данный участок, может быть определен по формуле:
("ф+у'2<Ь М = ^-. (5)
С учетом сказанного выше и формулы (5), касательное ускорение ведущего колеса вычисляется по формуле: ц. = и в каждом узле сетки
«г, =
М
ры
4\ + у'2ск ^1+у'2ск
0-5-(^,+Ю
(6)
Нормальное ускорение в каждой точке сетки определяется по формуле:
V2 Г2у" а.=^- = —— (7)
Для определения вертикального ускорения авер в каждой точке сетки спроектируем касательное и нормальное ускорения на ось у:
2 ff
. 0.5-(^+i У К У
<я „. = a, cos a + a- sin a =- ----1-
вер,1
или
Эта формула показывает изменение вертикальных ускорений при движении ведущего колеса по неровности, что и является характеристикой вертикальных колебаний. При качении ведущего колеса радиусом гк = 0,4 м, о коэффициентом сопротивления качению f = 0,03 через синусоидальную неровность, график которой представлен на рисунке 2,
у(х) = -0,5 сс^язс) + 0,5, (9)
Так как скорость колеса является функцией от момента сопротивления, то введение газо-гидравлического УДП с регулируемым дросселем, который позволяет получить регрессивно прогрессивную характеристику, которая описывается полином 6 степени формула (10):
К(Мс ) = -0,3510"19Мс6 - -0,2 • 10"1бМс5 +0,32-1 ОгпМ* + +0,214-Ю^М3 - 0,94-10-6М2-0ДЮ12М +3,4722
■> с 7 С ~ с 7
0.1 я 0.08 £ 0.06
1 004 а 0.02
О
- заезд в съезд
б в
А А7
0 0.4 0.8 1.2 1.6 2
ДЛИНЯд 1С
Рис. 2. Вид неровности
Совместное вычисление по формулам (3) и (4) позволяет определить зависимость скорости колеса, оборудованного УДП, от длины неровности. Эта зависимость представлена на рисунке 3 для опытного вари-
анта, принимаем для серийного постоянную скорость движения 4 м/с. Характер этой кривой достаточно легко объясним.
длинна, м
Рис. 3. Зависимость поступательной скорости агрегата с использованием УДП
от длины неровности
На участке выпуклости вниз неровности момент сопротивления увеличивается, что ведет к падению скорости колеса и закрутки привода по характеристики УДП. При переходе на выпуклую кривую Мс увеличивается за счет изменения Fц, и упругий привод начинает раскручиваться до точки Б, скорость нарастает до точки В, а далее при изменении направления выпуклости Мс уменьшается и скорость движения стабилизируется дросселем упругого привода [4, 5]. Умножение величины скорости по длине неровности на синус угла наклона касательной к траектории движения дает возможность определить значение вертикальной составляющей скорости движения в каждой точке неровности, график которой представлен на рисунке 4.
Как видно из этого графика рисунок 4 применение УДП достаточно значительно уменьшает вертикальные скорости на 60-70%, при заезде, что снижает вертикальные ускорения колеса, при съезде за счет дросселя привода вертикальные ускорения стабилизируются. Как видно из рисунка 5, вертикальные составляющие ускорения колеса, оборудованного УДП, ниже аналогичного ускорения у базового варианта на 70-80%.
длинна, м
Рис. 4. Изменение вертикальной скорости в базовом варианте (сплошная линия) и с использованием УДП (штриховая линия) 10
<&
к ^ я Э
<и
Он
о
Ьй
& О
<и с И
-а ¿г
5 " 5
ы к
10
ш 0 0.5 1 1.5 2
длинна, м
Рис. 5. Изменение вертикального ускорения в базовом варианте (сплошная линия) и с УДП (штриховая линия)
Вывод
Установка упругодемпфирующего привода в ведущем колесе на заезде на неровность позволяет снизить его вертикальные ускорения до 70-80%, что способствует снижению интенсивности колебаний на рабочем месте оператора и снижению амплитуды воздействия неровностей уменьшая динамические нагрузки на ходовую часть.
Список литературы
1. Полива
Для дальнейшего прочтения статьи необходимо приобрести полный текст. Статьи высылаются в формате PDF на указанную при оплате почту. Время доставки составляет менее 10 минут. Стоимость одной статьи — 150 рублей.