ИЗВЕСТИЯ РАН. ТЕОРИЯ И СИСТЕМЫ УПРАВЛЕНИЯ, 2014, № 4, с. 138-147
СИСТЕМЫ УПРАВЛЕНИЯ ДВИЖУЩИМИСЯ ОБЪЕКТАМИ
УДК 681.5.015:629.7.05
ФОРМИРОВАНИЕ УСТОЙЧИВЫХ К ОТКАЗАМ БЛОКОВ ДВИГАТЕЛЕЙ МАХОВИКОВ СПУТНИКОВЫХ СИСТЕМ СТАБИЛИЗАЦИИ И ОРИЕНТАЦИИ © 2014 г. С. Н. Фирсов
Украина, Харьков, Национальный аэрокосмический ун-т им. Н.Е. Жуковского "ХАИ" Поступила в редакцию 12.04.13 г., после доработки 27.02.14 г.
Представлены аналитические средства для определения необходимого количества и требуемого расположения избыточных двигателей маховиков в электромеханическом исполнительном органе, что позволяет сформировать избыточные конструкции электромеханических исполнительных органов, удовлетворяющие критериям сигнальной и структурной диа-гностируемости и позволяющие восстанавливать их работоспособность в реальном масштабе времени в нештатных ситуациях, вызванных видами отказов составных элементов.
Б01: 10.7868/80002338814040064
Введение. Требования к динамическим и ресурсным характеристикам спутниковых систем стабилизации и ориентации (ССО) современных малых космических аппаратов (МКА) обусловили использование двигателей-маховиков (ДМ) в качестве основных исполнительных механизмов [1—3]. В состав традиционного ССО входят три ДМ, установочные векторы которых совпадают с собственными осями вращения маховиков, ортогональны друг другу и параллельны основным осям инерции МКА [4—6]. Это позволяет упростить алгоритмы управления стабилизацией и ориентацией, а также осуществлять независимый выбор ДМ, исходя из требуемых динамических возможностей МКА в соответствующем канале управления. В последнее время разработчиками ССО все чаще используются нетрадиционные схемы установки, характеризующиеся избыточным количеством ДМ, а также неортогональностью их установочных векторов друг другу [7, 8].
Технические требования к динамическим возможностям ССО в различных каналах управления определяют диапазоны изменения кинетических и управляющих моментов соответствующих исполнительных механизмов и влияют на выбор конкретного типа ДМ из имеющегося в наличии номенклатурного ряда. Зачастую ДМ, наилучшим образом удовлетворяющий требуемым динамическим характеристикам, отсутствует, а разработка нового сопряжена с дополнительными материальными затратами и увеличением времени проектирования ССО. Так как моментные характеристики ДМ прямо пропорциональны их массе и габаритам, выбор ДМ с более широким, чем требуется, динамическим диапазоном приводит к нежелательному увеличению массогаба-ритных характеристик системы. Вместе с этим за счет применения неортогональных схем установки можно обеспечить близкое к требуемому распределение управляющего момента между каналами управления, используя при этом несколько идентичных ДМ, хорошо освоенных производством [9—11].
1. Постановка задачи. В случае возникновения нештатной ситуации, приводящей к полному отказу хотя бы одного из ДМ, традиционная ССО теряет пространственную управляемость, а МКА — возможность выполнить целевую задачу. В функционально устойчивых ССО восстановление работоспособности осуществляется за счет использования различного рода избыточностей. Такие виды избыточностей, как параметрическая, сигнальная и алгоритмическая, обеспечивают парирование видов отказов, приводящих к частичной потере работоспособности функциональных элементов. В случае же полного отказа ДМ восстановление работоспособности возможно только за счет структурной избыточности, следовательно, для обеспечения пространственной управляемости ССО даже в случае полного отказа произвольного исполнительного механизма необходимо использовать избыточные схемы установки ДМ и при этом располагать их таким образом, чтобы они были неколлинеарные друг другу. Схема расположения ДМ влияет на ошибку формирования результирующего управляющего момента, а также на динамические возможности ССО в каналах управления. Таким образом, необходимо определить количество ДМ в
функционально устойчивом блоке двигателей маховиков (БДМ) и варианты их расположения, которые наилучшим образом позволяют использовать структурную избыточность при управлении как в номинальном, так и аварийных режимах работы блока.
2. Формирование требований по компоновке ДМ в функционально устойчивом БДМ. Пусть М ут — требуемые значения управляющих моментов, а Му — формируемые силовой частью ССО. Тогда динамические требования к БДМ во многом определяются множеством значений управляющих моментов:
|Му(0| > Му.т, (2.1)
которые необходимо формировать для перевода МКА из произвольного начального состояния х0 е Я" в требуемое х(^) е Я" с определенными показателями качества в течение ограниченного временного интервала ? е [0;Таким образом, изменение вектора Му^) в указанной области в соответствии с реализуемыми в ССО законами управления должно обеспечивать требуемое управление параметрами движения МКА. Очевидно, что независимо от количества и способа расположения ДМ на борту МКА как минимум должно быть обеспечено выполнение условия (2.1). Выполнение сформированного условия позволит утверждать в первом приближении, что величина суммарного управляющего момента Му обеспечит вращение МКА с требуемым угловым ускорением в желаемом направлении.
Поскольку для МКА важными параметрами является как угловая скорость вращения, так и угловое ускорение, то в общем виде область возможных управляющих моментов ограничена эллипсоидальной поверхностью следующего вида:
Му.т х ^2 (Мут уУ (м, ^2
+
у.т у
1 у у
+ , у.т г 1 У
<|со т|, (2.2)
где Мут х, Мут , Мут г — проекции суммарного требуемого реактивного момента БДМ на оси связанной с МКА системы координат; со т — требуемый вектор углового ускорения.
Уравнение (2.2) представляет собой область требуемых значений реактивных моментов, необходимых для обеспечения вращения МКА с требуемым угловым ускорением при располагаемых моментах инерции.
Построение области множества создаваемых БДМ значений управляющих моментов — задача более сложная. В зависимости от количества и расположения ДМ относительно главных осей МКА возможно получить форму области управления, наиболее соответствующую заданным моментам инерции МКА, как при номинальном режиме работы БДМ, так и при возникновении видов отказов БДМ.
Минимально необходимое число ДМ, обеспечивающее полную управляемость МКА, равно трем. Кроме того, очевиден тот факт, что при полном отказе одного из ДМ ни один вариант компоновки трех ДМ не позволит с использованием двух ДМ обеспечить полную пространственную управляемость МКА. Иными словами, для обеспечения полной управляемости МКА при полном отказе одного из ДМ необходимо вводить дополнительный ДМ в БДМ, при этом остается открытым вопрос о вариантах расположения избыточного количества ДМ. Для ответа на этот вопрос сформируем критерии расположения ДМ в БДМ.
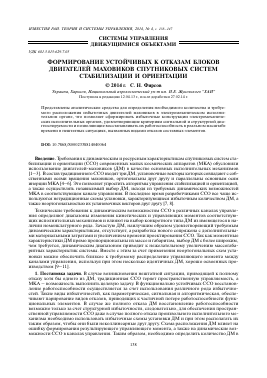
Рассмотрим систему ДМ, оси которых расположены параллельно боковым ребрам четырехгранной пирамиды (рисунок). Для пирамидального расположения ДМ искомыми параметрами являются углы а и р. Для определения значений углов воспользуемся критерием оценки эффективности применения БДМ, основанным на анализе следа установочной матрицы:
3
8р Б = £ (2.3)
г = 1
Т — 1
где Б = (й у) = [М М] ; М — матрица направляющих косинусов, определяющая взаимное расположение осей приложения управляющих моментов ДМ и связанной системы координат.
Для компоновки, представленной на рисунке, матрица направляющих косинусов с учетом несимметричности спутника (1Х Ф 1у Ф ^) будет равна:
Рисунок
М =
-к^п р а к2БШ в соб а -к3соБ р к^т р а к2 р соб а -к3соБ р к^т р а -к2БШ р соБ а-к3соБ р -к^т р бш а -к2БШ р соб а -к3соБ р
(2.4)
где кь к2, к3 — коэффициенты, учитывающие несимметричность МКА; Р — угол между боковыми ребрами пирамиды и ее высотой; а — угол между проекциями апофемы и бокового ребра на основание пирамиды.
Определим след матрицы Б:
8р Б =
1
1
1
(к^п р 8ш а) (2к2ъ'т в со8 а) (2к3со8 в)
2 '
(2.5)
Поскольку зависимость следа (2.5) представляет собой сумму квадратичных функций, то их минимумы будут достигаться при следующих значениях углов:
а = аг^
'к- |; Р = аг^
щк + к2)2
к^
(2.6)
Значения к1, / = 1,3, области управления, определяются параметрами, характеризующими степень несимметричности, — видом и значениями тензора инерции МКА. Для случая, когда тензор инерции имеет диагональный вид и выполняется условие неравенства его диагональных элементов (1Х ф 1у ф ^), как вариант за базовое значение момента инерции МКА можно принять момент инерции спутника относительно оси Ох ССК и при условии равенства динамических возможностей МКА относительно осей ССК масштабные коэффициенты будут равны к1 = 1; к2 = (1Х/1у)2; к3 = (1Х//г)2, а значения (2.6) примут вид
а = аг^(/Х /1у); р = аг^
1Х + 1У
(2.7)
Таким образом, получены параметры установки ДМ в БДМ. Для подтверждения работоспособности предложенного варианта компоновки ДМ в БДМ определим углы установки ДМ при полном отказе произвольного ДМ. Для рассматриваемого случая матрица направляющих косинусов (2.3) примет вид
M =
' 0 0 0 ^sin р sin a k2 sin р cos а -k3cos р kjsin р sin а -k2sin р cos a-k3cos р -kjsin р sin a -k2sin р cos a -k3cos р С учетом (2.7) след матрицы D равен
F = Sp Я = 1 ■ 1
(2.8)
2 (sin в sin a) 2 (k2sin в cos a) 2 (k3cos в)
(2.9)
Функция (2.9) совпадает с (2.4), следовательно, ее минимум достигает при выполнении условий (2.5). Также анализ функций (2.4) и (2.9) указывает на то, что при отказе одного из ДМ след матрицы увеличивается, что соответствует ухудшению распределения результирующего управляющего момента по осям МКА.
Проведенные исследования позволили определить основу расположения ДМ в БДМ — пирамидальная. Далее необходимо определить количество ДМ в пирамидальном БДМ, обеспечивающих его функциональную устойчивость.
3. Определение количества ДМ в функционально устойчивом БДМ. Рассмотрим избыточную систему БДМ, в состав которой входят п > 3 одинаковых ДМ с максимальным реактивным управляющим моментом М*. Обозначим через Ш1, / = 1, п, единичный вектор, параллельный оси вращения 1-го маховика. За начало всех векторов Ш1 выберем точку О — начало связан
Для дальнейшего прочтения статьи необходимо приобрести полный текст. Статьи высылаются в формате PDF на указанную при оплате почту. Время доставки составляет менее 10 минут. Стоимость одной статьи — 150 рублей.