ИЗВЕСТИЯ РАН. ТЕОРИЯ И СИСТЕМЫ УПРАВЛЕНИЯ, 2013, № 4, с. 43-70
ОПТИМАЛЬНОЕ УПРАВЛЕНИЕ
УДК 62.50
^-ОПТИМИЗАЦИЯ И ФИКСИРОВАННЫЕ ПОЛЮСА ИМПУЛЬСНЫХ СИСТЕМ С ОБОБЩЕННЫМИ ПРЕОБРАЗОВАТЕЛЯМИ "ЦИФРА-АНАЛОГ" И ЗАПАЗДЫВАНИЕМ
© 2013 г. Б. П. Лямпе, Е. Н. Розенвассер
ФРГ, Росток, Университет Росток, Россия, Санкт-Петербург, Государственный морской технический ун-т Поступила в редакцию 02.11.12 г., после доработки 25.03.13 г.
Предлагается частотно-полиномиальный метод ^-оптимизации для импульсных систем с обобщенными цифроаналоговыми преобразователями и запаздыванием, основанный на применении концепции параметрической передаточной матрицы. Установлен ряд общих свойств #2-оптимальных систем, которые необходимо учитывать при решении практических задач проектирования.
Б01: 10.7868/80002338813040136
Введение. При решении задач анализа и синтеза импульсных систем обычно предполагается, что в качестве цифроаналогового преобразователя (ЦАП) используется фиксатор нулевого порядка [1—4]. Для принятия такого предположения существуют серьезные физические и технические основания [5]. В то же время в ряде работ установлено, что в некоторых случаях применение более сложного ЦАП может существенно улучшить качество управления. В связи с этим актуальной проблемой является изучение с общих позиций свойств импульсных систем с обобщенными ЦАП (ОЦАП). Различным аспектам этой проблемы посвящены работы [6—15]. В частности, в [9, 10] получены условия стабилизируемости импульсных систем с ОЦАП. В [14] дано решение задачи модального управления такими системами. В [15] рассмотрена проблема ^-оптимизации импульсных систем с ОЦАП. В настоящей работе метод работы [15] обобщается на тот случай, когда в стандартной многомерной импульсной системе с ОЦАП существует чистое запаздывание в замкнутом контуре, а также запаздывание на входе и выходе системы. Это позволяет, в частности, приближенно учитывать вычислительное запаздывание, неизбежно присутствующее в импульсной системе. В качестве инструмента для решения задачи используется частотный метод, связанный с применением параметрических передаточных матриц (ППМ) [4, 16, 17]. Приводится процедура оптимизации, основанная на версии метода Винера—Хопфа в форме [18]. Устанавливается ряд важных для практических приложений качественных свойств систем рассматриваемого типа. В частности, устанавливается следующее.
1. Стабилизируемость системы не зависит от величины запаздываний и имеет место тогда и только тогда, когда стабилизируема соответствующая система без запаздывания.
2. #2-оптимальный регулятор зависит только от запаздывания в замкнутом контуре и не зависит от величин запаздываний на входе и выходе системы.
3. Часть полюсов замкнутой #2-оптимальной системы определяется только свойствами непрерывной части и не зависит от вида ОЦАП, используемого в системе, а также от величин запаздываний. Это обстоятельство накладывает некоторые ограничения на достижимое качество #2-оптимальных систем с ОЦАП. Далее такие полюса называются фиксированными. Если среди фиксированных полюсов имеются расположенные вблизи единичной окружности с центром в начале координат, то проектирование системы на основе методов ^-оптимизации может оказаться нецелесообразным.
1. Описание системы и постановка задачи. В работе рассматривается многомерная импульсная система, в которой непрерывный объект описывается уравнениями
dvv(t) = Av(t) + B1x(t- Xi) + BNu(t- т2), dt
y( t) = Cn v( t), (L1)
z(t) = C1 v(t - т3) + DLu(t - т2 - т3).
В этих уравнениях v(t) — вектор состояния х х 1, x(t) — вектор входа l х 1, y(t) — вектор обратной связи замкнутого контура n х 1, z(t) — вектор выхода системы к х 1, u(t) — вектор управления m х 1,
Д B1, BN, С1, CN, Dl — постоянные матрицы. Кроме того, т,, i = 1, 3 , — неотрицательные постоянные, характеризующие чистое запаздывание в различных частях контура управления.
Используя оператор дифференцирования p = — , уравнениям (1.1) можно сопоставить опера-
dt
торные уравнения
z (Р) = K (р) x (р) + Lt(p ) u (p), (1 2)
y (p ) = Mt (p ) x (p ) + N (p ) u (p ),
где
Kt(p ) = K(p) e-ptk, Lt(p ) = L (Р) e-pTL, (1 3)
Mt (p ) = M(p) e-ptm, Nt(p ) = N(p ) e-p TN. Здесь использованы обозначения
K(s) = Ci (sIx - A)-1 Bi, L (s) = Ci (sIx - AГХ + Dl ,
(1.4)
M(s) = CN(sIx - A)-1B1, N(s) = CN(sIx - A)-1 BN,
где Ix — единичная матрица х х х и
(1.5)
х
TK = Т1 + Т3, TL = Т2 + Т3, TM = Т1, TN = т2.
Предполагается, что объект (1.1), (1.2) управляется цифровой вычислительной машиной (ЦВМ), линеализованная модель которой описывается уравнениями
%к = у(кТ), (к = 0, ±1, ...), (1.6)
ао ^к + . + агУк - д = Ро ^к + . + Рг ^к - д, (1.7)
Г
и(г) = ^Н;(? - кТ)ук-„ кТ< г < (к + 1 )Т. (1.8)
I = о
В уравнениях (1.6)—(1.8) Т > 0 — период квантования, ^ — векторы р х 1, п х 1, а,-, р,- — постоянные матрицы р х р и п х п.
Уравнение (1.6) — это стандартное уравнение аналого-цифрового преобразователя (АЦП). Уравнение (1.7) будем называть уравнением дискретного регулятора (ДР). Если ввести в рассмотрение оператор обратного сдвига ^ = е—Т [1], то уравнение дискретного регулятора можно представить в виде а(^)ук = р(£)£,ь где а(^), р(0 — полиномиальные матрицы вида
а(0 = ао + а^ + ... + а?С?,
Р(0 = во + р1^ + ■■ + Р?С?.
Длее пару а(^), Р(0 будем называть дискретным регулятором или, коротко, регулятором. Регулятор а(^), Р(0 будет называться каузальным, если
ёйао Ф о. (1.9)
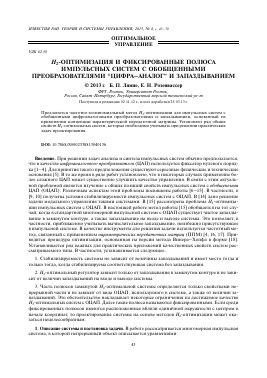
Рис. 1. Структура системы Бт
Известно [1—4], что реально могут быть реализованы только каузальные регуляторы. Поэтому ниже везде предполагается, что условие (1.9) выполнено. Для каузального регулятора определена рациональная матрица Wd(С,) = а-1(^)Р(С), которую будем называть его передаточной матрицей.
Уравнение (1.8) — это уравнение ОЦАП. В этом уравнении Н(1) — матрицы т хр. Предполагается, что элементы этих матриц определены на интервале 0 < 1 < Т и имеют на этом интервале ограниченную вариацию. С помощью матриц Н(1) можно определить матрицы
(*) = ]е-%(Г)(И, I = 1, г.
При этом матрицу
) = X е~"Т ^)
(1.10)
будем называть передаточной матрицей формирующего элемента.
В совокупности уравнения (1.2), (1.6)—(1.8) определяют стандартную импульсную систему Бт с ОЦАП и запаздыванием, структура которой изображена на рис. 1. Систему Бт будем называть устойчивой, если при х(1) = 011, где Ом — нулевая матрицар х q при 1 > 0, к > 0, справедливы оценки
<t)||< ^
-51
\\ы (t )||< сие
5
< Ск е
-5 кТ
Здесь и далее ||-|| означает норму конечномерного числового вектора и согласованную с ней норму матрицы. Кроме того, еч, си, с¥, 5 — положительные постоянные, причем 5 не зависит от начальных условий. Систему Бт, для которой существует регулятор а(^), Р(0, при котором она устойчива, будем называть стабилизируемой, а соответствующий реулятор — стабилизирующим.
По отношения к входу х(1) и выходу 1(1) система Бт — линейная и Т-периодическая. Аналогично [4, 3] можно показать, что системе Бт может быть сопоставлено конечное семейство линейных периодических операторов 1(1) = Ьп[х(1)], п = 1, €, каждому из которых соответствует ППМ Wn(s, 1), вычисляемая по формуле
t) = Ьц[е"/г]е"" = t + Т). (1.11)
При этом ППМ (1.11) являются аналитическими продолжениями друг друга и образуют единую ППМ W(s, 1) системы Бт, определенную на всей комплексной плоскости, за исключением некоторого множества полюсов.
Пусть система Бт устойчива и х(1) — центрированный векторный белый шум со спектральной матрицей Я^) = I. Тогда после окончания переходного процесса на выходе системы устанавлива-
т
И
о
г
0
ется периодически нестационарный случайный процесс ^У), дисперсия которого = й( + Т) определяется формулой [4]
^(Ъ = 2П | М ^(^ 0 0]^^,
где 1г — обозначение следа матрицы и штрих — оператор транспонирования. При этом число
Т у»
= 1 (I)Я = 2П |(5, (1.12)
dj
и -»
где
т
B(s) = 1 J[^(-s,t)s,t)]dt, (1.13)
и
определяет среднюю дисперсию установившегося выхода за период квантования, при этом число
S 2 = Д (1.14)
называется Н2-нормой системы ST.
Используя введенные определения, можно сформулировать задачу, рассматриваемую в данной работе. Заданы матрицы А, В1, BN, С1, CN, DL, величины запаздываний т,-, период квантования T, матрицы hj(t) и известно, что система ST стабилизируема. Требуется найти каузальный стабилизирующий регулятор a0(Z), P°(Q, при котором величина Н2-нормы имеет минимальное значение.
2. Предварительные соотношения для матрицы M(s). Пару постоянных матриц U, V соответствующих размеров будем называть минимальной, если она полностью управляема или полностью наблюдаема. Ниже везде, не оговаривая этого особо, будем предполагать, что пары А, BN и А, CN минимальны. В то же время пара A, B1 обычно не является минимальной. В этом случае, кроме представления
M(s) = CN(sI% - A) lBx, (2.1)
существует минимальное представление
M(s) = Cm(sIa - Am)-1 Bm, (2.2)
в котором пары Ам, BM и Ам, CM минимальны и a < %. Лемма. Отношение
s (s) = de t(sIx. - A)
°м( s) = ТТГ~г-
det(sIa - am)
является полиномом.
Доказательство леммы. Рассмотрим непонижаемые левые матричные отношения (НЛ-МО) [19]
CM(sIa - AM)-1 = PM (s) QM(s) , CN(sIx - A)-1 = Р-1(S) У!(s) .
В силу минимальности представления (2.2) имеем
detpM(s)~ det (sIa - Am) , (2.3)
где символ ~ означает эквивалентность полиномиальных матриц и, в частности, скалярных полиномов. При этом, как показано в [16], представление
M( s) = pM (s)[ Ум( s) Bm] (2.4)
— это НЛМО. Кроме того, из минимальности пары А, См следует ёе^^) ~ ёе^^ — А). Из (21) и (22) вытекает, что произведение
р,(а) М(з) = д,(з)Б1 (2.5)
— полиномиальная матрица. Поскольку правая часть (2.4) — это НЛМО, то из (2.5) вытекает, что р(?) = рМр^), где р^) — полиномиальная матрица. Поэтому отношение
ёе1р-) - ^ ^ - А) - ёе1р1(*) (2.6)
йегрм( *) ёе1:( - Ам)
является полиномом. Лемма доказана.
Из леммы вытекает, что если справедливо разложение
(а(*) = ¿еф1х - А) = (* - ...(« - VI + ... + vст = х, (2.7)
где все числа sí различны, то имеем
(м(*) = ёеф1а - Ам) = (* - - И + •■■ + Иа = а, (2.8)
причем 0 < и,- < V,-. Поэтому из (2.6) следует, что
ёе!р! (*)-(
Для дальнейшего прочтения статьи необходимо приобрести полный текст. Статьи высылаются в формате PDF на указанную при оплате почту. Время доставки составляет менее 10 минут. Стоимость одной статьи — 150 рублей.