Эксплуатация водного транспорта, судовождение
Овчаренко И.М., аспирант Государственного морского университета им. адмирала Ф. Ф. Ушакова
ИСПОЛЬЗОВАНИЕ АВТОМАТИЧЕСКИХ ИДЕНТИФИКАЦИОННЫХ СИСТЕМ ДЛЯ ВЫБОРА МАНЕВРА ОБХОДА СКОПЛЕНИЙ СУДОВ
В данной статье рассматривается проблема маневрирования судов в стеснённой акватории. Предложен подход к оценке опасности маневрирования с использованием накопленных баз данных о движении судов.
Ключевые слова: автоматические идентификационные системы, маневр, суда, судопоток.
USE OF AUTOMATIC IDENTIFICATION SYSTEMS FOR A CHOICE OF MANEUVER OF CIRCUMVENTION OF CONGESTION OF VESSELS
This article considers the problem of maneuvering of ships in confined water. The approach to assessing the risk of maneuvering with the use of the collected databases of vessel traffic is suggested.
Keywords: automatic identification systems, maneuver, court, traffic flow.
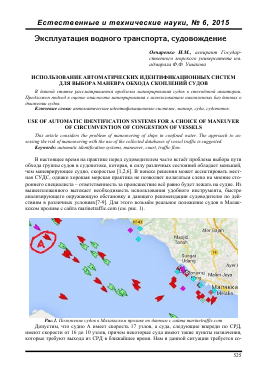
В настоящее время на практике перед судоводителем часто встаёт проблема выбора пути обхода группы судов в судопотоке, которая, в силу различных состояний обладает меньшей, чем маневрирующее судно, скоростью [1,2,6]. В поиске решения может ассистировать местная СУДС, однако хорошая морская практика не позволяет полагаться слепо на мнение стороннего специалиста - ответственность за происшествие всё равно будет лежать на судне. Из вышеизложенного вытекает необходимость использования удобного инструмента, быстро анализирующего окружающую обстановку и дающего рекомендации судоводителю по действиям в различных условиях [7-9]. Для этого возьмём реальное положение судов в Малак-кском проливе с сайта marinetraffic.com (см. рис. 1).
мыз
ф Лог Gajah
ч
Mas.j id Tansh
%
1э
Ss.i n-gai Udang
A, Ayerl
^ . MaEimJaya
щ
йлакка
Me I ilka
Рис.1. Положение судов в Малаккском проливе по данным с сайта marinetraffic.com Допустим, что судно А имеет скорость 17 узлов, а суда, следующие впереди по СРД, имеют скорости от 16 до 10 узлов, причем некоторые суда имеют такие пункты назначения, которые требуют выхода из СРД в ближайшее время. Нам в данной ситуации требуется со-
вершить однократный маневр, который бы обеспечил наилучшие параметры расхождения с судами, учитывая их дальнейшее поведение.
Очевидно, что лучшим датчиком первичной информации будет АИС при условии визуального подтверждения данных об отсутствии маломерных судов на рассматриваемом участке [3].
Маневры расхождения с группой судов можно условно разделить на 3 категории: оставление группы судов справа, оставление группы судов слева, проход группы судов посередине. Очевидным недостатком последнего способа является небольшая дистанция до судов, а также большая зависимость от их маневрирования. Недостатками первых двух способов являются близость к границе полосы движения и как следствие ограниченность собственного маневрирования при наличии маневрирования обгоняемого судна. Это накладывает обязательство дополнительного анализа поведения других судов.
Будем полагать для простоты описания, что вектор состояния судна состоит из положения, скорости и курса, как функций во времени.
По скоростным качествам, в зависимости от положения, суда можно разделить на те, которые не мешают нашему судну, так как их скорость примерно равна скорости нашего судна и те, которые будут обгоняться в ближайшее время. Как известно, в настоящее время существуют надёжные методы определения параметров расхождения судна с целью [4], однако, в данной задаче требуется расхождение с учётом возможного маневрирования судна. Для этого, будем полагать, что маневр с изменением скорости легко отслеживается и сам по себе занимает значительное время, которое будет достаточно для перевода судна из одного режима в другой и соответствующей корректировке прогноза маневра. Следовательно, при анализе можно не учитывать возможное изменение скорости встречного судна.
Также, очевидно, что помехой будут являться суда, которые будут выходить влево или вправо из судопотока.
Для оценки возможности их маневрирования курсом следует собрать базу данных треков АИС и фиксировать, как поворачивают суда при наличии у них определенных пунктов назначения. Для определённости, будем использовать 2 крайних траектории поворота, которые соответствуют граничным редчайшим методам маневрирования. Если судну может помешать маневр между двумя крайними траекториями судна из обходимой группы, то оно принимается как опасное.
Тогда алгоритм оценки будет выглядеть примерно так (см. рис. 2):
Рис. 2. Алгоритм оценивания безопасности маневрирования
Для примерной оценки предполагается понимать вероятное местонахождение судна-цели между двумя экстремальными траекториями его захода в порт. Тогда условия опасности можно описать так: если наше судно при текущей скорости пересекает линию, соединяющую траектории движения судна-цели, то судно считается опасным.
Общая степень опасности берется в относительном счёте. При этом расчёт положения производится с учётом падения скорости на поворотах по методике, указанной в [5]. Уравнение оценки представимо в виде:
P = Po +APX + APy ф Pa (1)
где P¡ - следующее положение судна-цели;
Po - текущее положение; Pa - текущее прогнозируемое положение нашего судна, AP - изменение положения по оси X или Y, причём ось X совпадает с продольной скоростью, Y - с поперечной.
Отметим, что
APX = t • v
APy = 0 при времени, когда маневр не начался APx = tm • v — Avx(t — tm ) • cosa
APy = Avy (t — tm ) • sin a, при времени, когда маневр начался.
В формуле I - общее время, 1т - время начала маневра, Ау, — изменение скорости, в зависимости от маневренных характеристик судна, выбираемые с помощью методики и таблиц,
указанных в [5], а - угол, отклонения от оригинального курса, рассчитанный по той же методике.
Соответственно, при таком подходе можно для вычисления степени опасности оперировать отношением времени начала и конца маневра. Соответственно, при итерации целесообразна дискретизация вычислений, для примера в конкретной статье она была принята в 10 секунд для времени и 1 градусу для курса. Входные данные пролонгированы для использования +60 моментов симуляционного времени (для возможности проигрывания курсов +/-30°). Финальная система имеет вид:
Рис. З.Система, вычисляющая уровень опасности других судов.
На вход в систему подаются данные о судах-целях: положение, измеряемое в декартовых координатах от нулевого положения нашего судна, предполагаемые курсы судов-целей и скорости судов целей. Также на вход системы подаются примерные данные нашего положения судна (в работе получены с учётом маневренных характеристик судна схожего тоннажа). Потом идёт блок преобразования скорости и курса в координаты последующего положения судна, учитывая возможные вариации (для данного примера они составили 60°). Далее идёт блок вычисления совпадений и последующего их накопления. После накопления данные усредняются и подаются на выход.
Выводы: при этом условии и положении судов на рисунке 1, а также предположительных траекториях поворота судна в +/-30° от предусматриваемой правилами траектории алгоритм выдал рекомендацию обходить поток справа, слева степень опасности была равна 0,0937. Справа поток безопаснее, степень опасности была 0,0123. В результате полученный способ можно внедрить в навигационно-информационную систему для выдачи рекомендаций судоводителю по поводу выбора параметров маневра. В перспективном развитии также имеется возможность вставлять соответствующие веса для различных компонент: подготовка экипажей, вероятность маневрирования судна-цели по причине, отличной от следова-
ния к пункту назначения, неверные данные АИС, судно без АИС и т.д. Все это возможно к
осуществлению через добавку соответствующих анализирующих блоков.
ЛИТЕРАТУРА
1. Дмитриев В.И., Григорян В.Л., Катенин В.А. Навигация и Лоция. Учебник для ВУЗов/Под ред. В.И. Дмитриева. М.: ИКЦ «Академкнига», 2004. - 471с.
2. Миронов А.В. «Адаптация метода анализа иерархий для принятия решений при оценке степени опасности столкновения морских судов», Известия высших учебных заведений. Северо-Кавказский регион. Серия: Технические науки, 2012, № 3, 8-12.
3. Субанов Э.Э., Авдонькин Д.С. Определение периодов контроля форматов АИС с целью обеспечения заданной надежности определения навигационных параметров движения судна в непрерывном режиме // Сборник научных трудов. Выпуск No15. - Новороссийск: МГА им. адм. Ф.Ф. Ушакова, 2010.
4. RADAR HANDBOOK. Third Edition. By Merrill I. Skolnik ISBN 978-0-07-148547-0 MHID 0-07-148547-3. McGraw-Hill, 2008 - 1352p.
5. В.И. Снопков. Управление судном. 3-е издание. - Санкт-Петербург, АНО НПО Профессионал, 2004 - 532 с.
6. Д.Ю. Салько, К.М. Искандаров Применение линейного моделирования при планировании работы флота судоходной компании Вестник Государственного Морского Университета имени адмирала Ф.Ф. Ушакова №1(1), Новороссийск: РИО ГМУ им. адм. Ф.Ф. Ушакова. 2012.
7. Мироненко А.А. Модель программного движения судна в стесненных водах. Мехатро-ника, автоматизация, управление. 2013. № 2., М.: Новые технологии. С. 65-70.
8. Мироненко А.А. Программирование траектории и режимов движения судна в стесненных водах. Мехатроника, автоматизация, управление. 2012. № 3., М.: Новые технологии.
9. Васьков А.С., Мироненко А.А. Интеллектуальный интерфейс системы поддержки принятия решений судоводителем Известия высших учебных заведений. Северо-Кавказский регион. Серия: Технические науки. 2006. № П. С. 41.
Для дальнейшего прочтения статьи необходимо приобрести полный текст. Статьи высылаются в формате PDF на указанную при оплате почту. Время доставки составляет менее 10 минут. Стоимость одной статьи — 150 рублей.