МЕХАНИКА ТВЕРДОГО ТЕЛА № 2 • 2014
УДК 531.44
© 2014 г. В. Г. ЧАЩУХИН
ИССЛЕДОВАНИЕ АНИЗОТРОПИИ СКОЛЬЗЯЩИХ УПОРОВ МОБИЛЬНОГО РОБОТА
Исследовано взаимодействие контактных устройств сцепления миниатюрного робота с поверхностью. Оценены величины основных параметров, которые необходимы для успешного функционирования таких устройств. Приводится методика расчета величины анизотропности трения, которой обладают адгезионные материалы с ворсистой структурой. Результаты данной работы могут быть использованы при проектировании роботов, предназначенных для движения в ограниченном пространстве, в частности в узких трубах.
Ключевые слова: анизотропное трение, адгезия, скользящие упоры роботов.
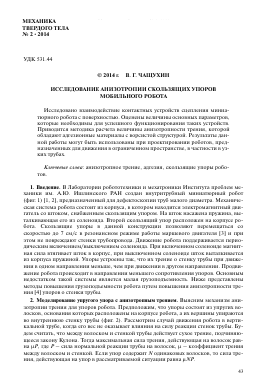
1. Введение. В Лаборатории робототехники и мехатроники Института проблем механики им. А.Ю. Ишлинского РАН создан внутритрубный миниатюрный робот (фиг. 1) [1, 2], предназначенный для дефектоскопии труб малого диаметра. Механическая система робота состоит из корпуса, в котором находится электромагнитный двигатель со штоком, снабженным скользящим упором. На шток насажена пружина, выталкивающая его из соленоида. Второй скользящий упор расположен на корпусе робота. Скользящие упоры в данной конструкции позволяют перемещаться со скоростью до 7 см/с в резонансном режиме работы маршевого двигателя [3] и при этом не повреждают стенки трубопровода. Движение робота поддерживается периодическим включением/выключением соленоида. При включенном соленоиде магнитная сила втягивает шток в корпус, при выключенном соленоиде шток выталкивается из корпуса пружиной. Упоры устроены так, что их трение о стенку трубы при движении в одном направлении меньше, чем при движении в другом направлении. Продвижение робота происходит в направлении меньшего сопротивления упоров. Основным недостатком такой системы является малая грузоподъемность. Ниже представлены методы повышения грузоподъемности робота путем повышения анизотропности трения [4] упоров о стенки трубы.
2. Моделирование упругого упора с анизотропным трением. Выясним механизм анизотропии трения для упоров робота. Предположим, что упоры состоят из упругих волосков, основания которых расположены на корпусе робота, а их вершины упираются во внутреннюю стенку трубы (фиг. 2). Рассмотрим случай движения робота в вертикальной трубе, когда его вес не оказывает влияния на силу реакции стенок трубы. Будем считать, что между волоском и стенкой трубы действует сухое трение, подчиняющееся закону Кулона. Тогда максимальная сила трения, действующая на волосок равна цР, где Р — сила нормальной реакции трубы на волосок, ц — коэффициент трения между волоском и стенкой. Если упор содержит N одинаковых волосков, то сила трения, действующая на упор в рассматриваемой ситуации равна цNP.
iíiij)¡t:j:inj»iijIi(tjimjIiMjiMijHiljiiiijHii|iiiiji
Ч 5 6 1 8 3
Фиг. 1
Введем продольный и поперечный коэффициенты упругости волоска
kx = п R2E/L, ky = 3 EI/Ú
где R — радиус ворсинки, Е — модуль Юнга материала ворсинки, I — момент инерции поперечного сечения ворсинки, L — длина волоска. Отношение коэффициентов жесткости обозначим через s: s = kjky. Заметим, что для цилиндрической ворсинки I = nR4/4, следовательно s = 4L2/3R2.
Пусть P — сила упругого сжатия волоска при отсутствии движения робота (фиг. 3). Смещение кончика волоска происходит вдоль его оси и перпендикулярно ей Лх = = (Psin9)/kx и Лу = (Pcos9)/ky. Здесь 9 — угол между осью волоска и осью трубы. Результирующее смещение перпендикулярно поверхности
Л А • Q , А А т>( sin2 9 , cos2 9Л ,, 1Ч
А = Ах sin 9 + Ay cos 9 = —-— + —-— J (2.1)
^ kx ky
Фиг. 3
Фиг. 4
Заметим, что исходя из геометрии трубы и робота А = Zsin9 — H (H — расстояние от стенки трубы до корпуса робота).
Будем считать, что сила, действующая вдоль ворсинки, достаточно мала для того, чтобы вызвать ее продольный изгиб, который произойдет, если продольная сжимающая сила достигнет величины критической силы Эйлера, т.е. должно выполняться следующее условие:
P sin 0<Я3 R4 E/ (16 L2) (2.2)
Выразив из (2.1) Р и подставив в (2.2) получим ограничение на величину относительной деформации волоска s = A/Zsin9:
g<n 2 ( tg2 0 + Д ) 12s tg2 0
Кроме того, в силу постановки задачи 0 < s < 1.
22
График функции/(9) = п2( tg 0 + s)/12s tg 0 представлен на фиг. 4.
Пусть теперь робот движется вперед ("по ворсу") с постоянной скоростью, тогда на кончик ворсинки действует сила сжатия Р1 и сила трения F1 = цР1, где ц — коэффициент трения между ворсинкой и поверхностью. Смещение вдоль оси ворсинки равно Áx1 = (PSin9 — F1cos9)/kx, а перпендикулярно ей Áy1 = (P1cos9 + /^т9)/кг При этом если ц > tg 0 , то ворсинка растягивается, если ц = tg 0 , то ворсинка не сжимается, а
только изгибается. Если ц < tg 0 , то ворсинка сжимается.
Результирующее смещение перпендикулярно поверхности трубы в этом случае останется тем же, так как оно зависит лишь от геометрии робота и трубы
Л „ f sin2 0 , cos2 0^, „ . Q Qf 1 1 A = PJ -+- + цP1sin0cos0---
V kx ky J % L
Модуль силы трения, действующей на ворсинку имеет вид
kx A( 1 + tg2 0 ) Ц
Fi = —2--(2.3)
tg 0 + .(s - 1) tg 0 + 5
Аналогичным образом вычисляется абсолютная величина силы трения, действующей на ворсинку, при движении назад ("против ворса"):
Ax2 = (^2sin0 + F^cos0)/kx, Ay2 = (^cos0 - F^sin0)/ky
При этом, если ц > ctg0 , то ворсинка изгибается вправо (против хода движения), если ц = ctg 0 , то ворсинка не изгибается, если ц < ctg 0 , то ворсинка изгибается влево (по ходу движения):
F2 = kxA( 1 + tg2 0 ) . (2.4)
tg20 - ц(s - 1) tg0 + s
Так как считается что Р2 > 0, то знаменатель в выражении для силы трения в обратном направлении должен быть положителен. Это выполняется, если
ц < J¿e±£. = /1 (2.5)
(s - 1) tg 0 Л
В том случае, если это условие не выполняется, ворсинки являются слишком мягкими для того, чтобы обеспечить давление на стенки трубы при скольжении "против ворса". Условие, при котором не произойдет продольного изгиба ворсинки следующее:
P2sin0 + F2cos0 < я3R4E/( 16L2) (2.6)
Подставив F2 из (2.4) и используя соотношение F2 = цР2, получим
2 2 2 .. 2 ( tg2 0 + s ) - 12ss tg2 0 = f ц < 2 = /2 (12 s 6 + n2( s - 1)) tg 0
Это условие, накладываемое на коэффициент трения, более жесткое, чем (2.5). При s > 0, 0 < 9 < я/2, s > 1 ворсинка потеряет продольную устойчивость при меньшем коэффициенте трения, чем определенный условием (2.5).
Отношение модулей сил трения при движении назад и вперед имеет вид
F = tg2 е + и(? - i ) tg е + s Fi tg2 е - и(? -1) tg е + s
Из (2.6) и (2.3) следует, что продольного изгиба не произойдет, если
F < п 2 ( tg2 е + и ( s - i) tg е + s ) = f Fi i2ss tg е( tg е + и) e
Зависимость отношения F2/F1 от 9 для ц = 0.5 изображена на фиг. 5.
Если ворсинки окажутся слишком мягкими, то потеря устойчивости произойдет при меньшем угле 9, чем тот, при котором будет максимально отношение F2/F:. При потере устойчивости сжатие волоска осуществляется гораздо легче, чем в случае его устойчивого состояния. Сила трения F2 после потери устойчивости будет уменьшаться, так как уменьшится сила нормального давления со стороны стенки трубы. На фиг. 6 показана зависимость fe(9) для различных величин относительного сжатия ворсинки. Также на этом графике изображена зависимость F2/F1 от 9 для ц = 0.5 и s = 10. При увеличении угла наклона ворсинки к поверхности отношение сил трения в обратном и прямом направлениях будет увеличиваться до тех пор, пока ворсинка не потеряет устойчивость. Это произойдет в точке пересечения графиковf,(9) и F2/F1. Если потери устойчивости нет (для s близких к нулю), то отношение F2/F1 достигает своего максимума и убывает при дальнейшем увеличении угла. При 9 = я/2 анизотропии по трению наблюдаться не будет в силу симметрии системы при движении в прямом и обратном направлениях.
3. Повышение анизотропности трения при использовании адгезионных материалов. При использовании сухого адгезионного материала на контактных поверхностях внутритрубного электромагнитного миниробота, рассмотренного в [1, 5], можно увеличить анизотропность трения его упоров. Увеличение анизотропности трения необходимо для повышения грузоподъемности робота. Повысить анизотропность трения можно, снабдив контактные поверхности упоров робота накладками, изготовленными из адгезионного материала (фиг. 7). Накладки должны представлять собой нано-
Фиг. 7
Фиг. 8
структурированный материал, наклеенный на упругоподатливую подложку, которая в свою очередь наклеена на контактную поверхность робота. Упругоподатливая подложка предназначена для того, чтобы адгезионный наноструктурированный материал плотно прилегал к поверхности трубы с учетом ее макронеровностей.
На фиг. 8 показана структура такого адгезионного материала с анизотропным трением. На полиамидной подложке вытравлены ворсинки со срезанной под определенным углом вершиной, на срезе в свою очередь выращены еще более мелкие волоски. Диаметр ворсинок порядка десятков микрометров, диаметр волосков порядка долей микрометра. На фиг. 9 показано поведение ворсинок при отсутствии нагрузки (слева), а также при скольжении вперед (в середине) и назад (справа).
i -«;—^ I
IIIIIIIIII 11111/11//ШШi
Фиг. 9
Фиг. 10
Во время скольжения вперед ворсинки изгибаются таким образом, что площадь соприкосновения с поверхностью минимальна. При движении в обратном направлении с поверхностью будут контактировать волоски, находящиеся на срезе ворсинок, возникнет адгезионное притяжение, следовательно, увеличится сила трения скольжения.
При скольжении назад ворсинка изгибается на некоторый угол. Если срезать концы ворсинок под этим углом и расположить на них адгезионный материал, то при скольжении назад они придут в соприкосновение с поверхностью, и увеличится результирующая сила трения F2 = P2 + Fadh). Сила трения при этом будет иметь величину
F2 _ ЦА + Л,)( 1 + *'0)ц, _ cos e sin
tg20 - ^s - 1) tg0 + s V s У
Отношение сил трения при скольжении против ворса и по ворсу следующее:
F _ Í, + tg2 0 + ц ( s - 1) tg 0 + s
= I 1 + .
р1 К А tg20 - ц(5 - 1)^0 + 5
Зависимость Р2 от 9 при ц = 0.3, 5 = 10 и Fadh = 10Н показана на фиг. 10.
Угол, под к
Для дальнейшего прочтения статьи необходимо приобрести полный текст. Статьи высылаются в формате PDF на указанную при оплате почту. Время доставки составляет менее 10 минут. Стоимость одной статьи — 150 рублей.