Технология приборостроения
Со Лин Аунг, аспирант Московского государственного института электронной техники
ИССЛЕДОВАНИЕ СИСТЕМЫ СТАБИЛИЗАЦИИ СКОРОСТИ ЗАМКНУТОГО ШАГОВОГО ДВИГАТЕЛЯ
В настоящее время для управления плавным перемещением рабочего инструмента по нескольким координатам одновременно в станках с числовым программным управлением (ЧПУ), для повышения точности изготовления прецизионных деталей в точном приборостроении (например, часовая промышленность, устройства точной механики и т.д., а также в микроэлектронике для выращивания монокристаллического кремния по методу Чохральско-го и Степанова) требуются высокая плавность и стабильность скорости (0,1-0,5)% [1]. Для реализации этих задач в настоящее время находят применение системы управления шаговым двигателем со стабилизацией скорости.
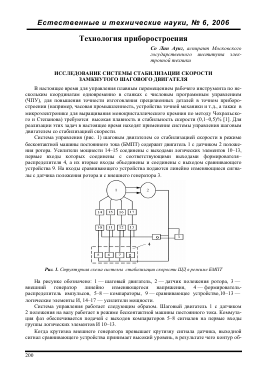
Система управления (рис. 1) шаговым двигателем со стабилизацией скорости в режиме бесконтактной машины постоянного тока (БМПТ) содержит двигатель 1 с датчиком 2 положения ротора. Усилители мощности 14-15 соединены с выходами логических элементов 10-13, первые входы которых соединены с соответствующими выходами формирователя-распределителя 4, а их вторые входы объединены и соединены с выходом сравнивающего устройства 9. На входы сравнивающего устройства подаются линейно изменяющиеся сигналы с датчика положения ротора и с внешнего генератора 3.
Рис. 1. Структурная схема системы стабилизации скорости ШД в режиме БМПТ
На рисунке обозначено: 1 — шаговый двигатель, 2 — датчик положения ротора, 3 — внешний генератор линейно изменяющегося напряжения, 4 — формирователь-распределитель импульсов, 5-8 — компараторы, 9 — сравнивающее устройство,10-13 — логические элементы И, 14-17 — усилители мощности.
Система управления работает следующим образом. Шаговый двигатель 1 с датчиком 2 положения на валу работает в режиме бесконтактной машины постоянного тока. Коммутация фаз обеспечивается подачей с выходов компараторов 5-8 сигналов на первые входы группы логических элементов И 10-13.
Когда крутизна внешнего генератора превышает крутизну сигнала датчика, выходной сигнал сравнивающего устройства принимает высокий уровень, в результате чего контур об-
ратной связи по положению оказывается замкнутым и двигатель разгоняется. В процессе разгона двигателя возрастает крутизна сигнала датчика и при достижении им крутизны сигнала с внешнего генератора сравнивающее устройство переходит в противоположное состояние. Контур связи по положению размыкается и двигатель тормозится под действием момента нагрузки до определенного срабатывания сравнивающего устройства.
Таким образом, скорость двигателя стабилизируется на уровне, определяемым внешним генератором.
Рассматриваемая система стабилизации скорости исследуется в программном пакете МЛТЬЛВ. Уравнения, описывающие систему стабилизации скорости замкнутого, имеют следующий вид [2]:
йв .
1й - х—I + х—- = и. йт йт
й
йв . & 5 йв
гч + х~1а + х-+ -
й 2в
йт йт Кб йт
2 = *ЧК б
=и
(1)
йт
т=Л ±
п \а)
Когда контур связи по положению ротора замыкается, составляющие напряжения внешнего воздействия равны:
ий = Саз(у-в), ич = &п(у - в). При размыкании контура связи составляющие напряжения внешнего воздействия равны:
ий = о, ид = 0.
На рис. 2 показана математическая модель системы стабилизации скорости ШД в программном пакете МЛТЬЛВ [3].
Рис. 2. Математическая модель системы стабилизации скорости ШД в режиме БМПТ
В этой модели для моделирования режимов замыкания и размыкания контура связи по положению ротора используется программный блок «Embedded MATLAB function». На рис. 3 показана блок-схема алгоритма работы блока «Embedded MATLAB function», а на рис. 4 приведен текст программы этого блока.
*} Embedded MATLAB Editor - Block: test/gamma-thêta
File Edit Text Debug Tools Window Help
-P|X
? X
□ &
Jt
в t
* w
£l 1 " □
1 (function [Ud,ïïq] = fen(theta,gamma,dtheta,generator)
2 % This block: supports an eirbeddable subset
3 %of the MATLAB language.
4 % See the help menu for details.
5 - Ud=0; Uq=0;
6 - if(dtheta>=generator]
7 - Ud=0; S - Uq=0; 9 - else
10 - gamma=gamiria+f loor [ (theta+pi/4) / (pi/2) ) *pi/2;
11 - Ud=cos ( gaimia-theta) ;
12 - Uq=sin ( gatmia-theta) ;
13 - end
14
Л
Ready
Ln 1 Col 1
Рис. 3. Блок-схема алгоритма работы блока «Embedded MATLAB function»
Рис. 4. Программа блока «Embedded MATLAB function»
Исследуем модель системы управления ШД в режиме БМПТ, без внешнего генератора. Изменяя момент нагрузки, найдем значения установившейся скорости. На рис. 5 показаны полученные переходные процессы изменения скорости ШД для этого режима при изменении момента нагрузки в диапазоне (0,05 - 0,25) и 3 = 0,2; X = 0,2 .
Из рис. 5 видно, что при изменении момента нагрузки в диапазоне (0,05-0,2) значения установившейся скорости более 3. Поэтому можно стабилизировать скорость двигателя с
использованием внешнего генератора, на уровне, не более 3 при моменте нагрузки не более 0,2. Изменяя коэффициент внутреннего демпфирования, можно расширить диапазон регулирования скорости.
4.5 4 3.5 3
р 2.5
1.5 1
0.5
0
-0.5
0 20 40 1 60 80 100
Рис. 5. Переходные процессы изменения скорости ШД в режиме БМПТ
На рис. 6 приведены полученные эпюры переходных процессов изменения скорости ШД в режиме стабилизации при изменении момента нагрузки в диапазоне (р,н = 0,05 ^ 0,2). Из
графиков видно, что при изменении момента нагрузки установившаяся скорость не изменяется и стабилизирована на уровне 3, определяемым внешним генератором.
3.5 «у«
3 2.5 2 1.5 1
0.5
О
-0.5
О 5 10 15 20 25 30
I
Рис. 6. Переходные процессы изменения скорости ШД в режиме стабилизации
Исследования колебаний мгновенной скорости ШД в режиме стабилизации показывает их рост с увеличением момента нагрузки на валу двигателя, что показано на рис. 7.
й=0,2; х=0,2;
Ин=<>,05
ЙЮ.2
Шуст
3
2.95
2.9
2.85
2.8
Рис. 7. Колебания мгновенной скорости ШД в режиме стабилизации
Полученные результаты показывают необходимость разработки систем уменьшения колебаний мгновенной скорости ротора ШД на базе информации о положении ротора внутри шагового интервала.
СПИСОК ЛИТЕРАТУРЫ
1. http://virlib.eunnet.net/win/metod_materials/wm7/index.htm
2. Ивоботенко Б.А., Рубцов В.П., Садовский и др. Дискретный электропривод с шаговыми двигателями, Под общ. ред. Чиликина М. Г. М., «Энергия», 1971. - 624 с.: ил.
3. Лазарев Ю. Моделирование процессов и систем в МЛТЬЛВ. Учебный курс. - СПб.: Питер; Киев: Издательская группа ВЫУ, 2005. - 512 е.: ил.
Для дальнейшего прочтения статьи необходимо приобрести полный текст. Статьи высылаются в формате PDF на указанную при оплате почту. Время доставки составляет менее 10 минут. Стоимость одной статьи — 150 рублей.