ПРОБЛЕМЫ МАШИНОСТРОЕНИЯ И НАДЕЖНОСТИ МАШИН
№ 2, 2014
УДК 621.833
© 2014 г. Короткин В.И., Газзаев Д.А.
ИЗГИБНАЯ НАПРЯЖЕННОСТЬ ЗУБЬЕВ ПОД ДЕЙСТВИЕМ РАСПРЕДЕЛЕННОЙ НАГРУЗКИ В РАЗЛИЧНЫХ ФАЗАХ ЗАЦЕПЛЕНИЯ
НОВИКОВА
Приводятся результаты моделирования напряженного состояния зубьев колес передач Новикова, находящихся под действием нагрузки, распределенной по площадке контакта, и выполненных на базе стандартного исходного контура с двумя концентраторами изгибных напряжений. Моделирование проведено в конечно-элементной среде ЛК8У8 при решении пространственной контактной задачи. Получена зависимость для определения параметра, учитывающего продольную протяженность площадки контакта и влияние различных геометрических факторов. Представлены графики и таблицы, отражающие результаты исследования изменения приведенных напряжений по фазам зацепления вплоть до торцового контакта, что необходимо при изучении работы передачи в условиях многопарного зацепления.
Присущая зацеплению Новикова высокая контактная прочность не всегда определяет общую нагрузочную способность передачи, выполняемой с упрочненными зубьями колес — встречаются случаи, когда лимитирующим фактором выступает недостаточная изгибная прочность зубьев. Причин здесь несколько; основные из которых: а) применение исходных контуров с нерациональными параметрами; б) отсутствие надежной расчетной методики, подкрепленной экспериментом; в) практическое отсутствие способов качественной финишной отделки зубьев после термообработки, например, химико-термической. (Последняя проблема требует отдельного анализа и в данной статье не рассматривается.) Поэтому совершенствование исходных контуров и методики расчета зубьев на изгиб представляет актуальную задачу, успешное решение которой позволит существенно расширить область использования прогрессивного зацепления Новикова.
В литературе [1 и др.] прочно устоялось представление о структуре зависимости для определения изгибных напряжений зубьев передач, работающих с теоретически точечным (практически локальным) контактом взаимодействующих поверхностей, к которым относятся и передачи Новикова. Эта структура включает следующие основные компоненты: 1) приведенный объемный коэффициент, учитывающий форму зуба и зависящий от применяемого исходного контура, эквивалентного 1и числа зубьев зубчатого колеса и смещения х исходного контура при зубонарезании; 2) коэффициент, учитывающий распределение заданной нагрузки по площадке контакта, находящейся в середине зубчатого венца (при условии отсутствия влияния торцов); 3) параметр, учитывающий изменение напряженного состояния зуба в зависимости от фазы зацепления, или от положения точки (площадки) контакта по длине зуба по отношению к средней (базовой); 4) параметр, характеризующий неравномерность распределения нагрузки и напряжений по контактным площадкам с учетом близости торцов, технологических погрешностей изготовления зубчатых колес и податливостей деталей
Коэффициент
Приведенное число 1и зубьев колеса
смещения х* 9 12 15 18 40 60 100 200
-0,6 - - - - 0,571 0,539 0,517 0,521
-0,5 - - - - 0,547 0,524 0,516 0,518
-0,4 - - - - 0,525 0,510 0,511 0,515
-0,3 - - - 0,567 0,507 0,503 0,510 0,516
-0,2 - 0,628 0,570 0,531 0,497 0,498 0,504 0,515
-0,1 0,651 0,576 0,532 0,501 0,484 0,497 0,507 0,514
0 0,591 0,535 0,500 0,476 0,485 0,495 0,505 0,512
0,1 0,543 0,502 0,474 0,459 0,486 0,498 0,507 0,513
0,2 - 0,476 0,461 0,467 0,491 0,500 0,509 0,514
0,3 - - - - 0,498 0,504 0,511 0,516
0,4 - - - - 0,504 0,510 0,513 0,516
0,5 - - - - - 0,518 0,516 0,520
0,6 - - - - - - 0,525 0,524
привода в многопарном зацеплении; 5) так называемый фактор изгибной напряженности, включающий силовой (окружное усилие Г) и масштабный (модуль зацепления т) параметры.
В работе [2] получен приведенный объемный коэффициент У¥Е формы зуба, представляющий собой максимальное по профилю (т.е. по обоим концентраторам) единичное напряжение от действия приложенного в расчетной точке сосредоточенного единичного окружного усилия на бесконечно длинный зуб единичного модуля. Задачу решали моделированием в конечно-элементной постановке с помощью пакета А^УВ. При этом исследованы некоторые известные исходные контуры, предназначенные для передач Новикова с высокотвердыми поверхностями зубьев и соответственно имеющие по профилю два изгибных концентратора — нижний (в области галтели и активной ножки зуба) и верхний (в районе полюсной линии, т.е. под активной головкой зуба). Термин "приведенный" (сопровождаемый нижним индексом "Е") здесь и далее означает, что напряжение растяжения в концентраторах приводится в соответствии с энергетической теорией прочности к эффективному (индекс "э"). Это, как показано в [3], позволяет при оценке изгибной прочности использовать допускаемые напряжения, установленные стандартом [4] для эвольвентных передач с теоретически линейным контактом зубьев.
При исследованиях было установлено [2], что для передач Новикова общемашиностроительного применения из рассмотренных исходных контуров наиболее предпочтителен исходный контур по ГОСТ 30224-96 [5], обеспечивающий наименьшую изгиб-ную напряженность и ее небольшие различия по обоим концентраторам. В табл. 1 приведены максимальные по профилю значения приведенных объемных коэффициентов У1Е формы зуба передач Новикова с исходным контуром, по ГОСТ 30224-96, отобранные по условию отсутствия подрезания активной головки зубьев [2]. (Звездочка в табл. 1 и далее по тексту указывает, что обозначенный параметр соответствует единичному модулю.)
Для получения этих результатов впервые численно решена (в пакете АМЗУЗ) пространственная контактная задача с заранее неизвестными формой и размерами площадки контакта, что позволило устранить отмеченный в [2] ряд условностей прежних исследований [6 и др.] и получить в итоге новые уточненные результаты.
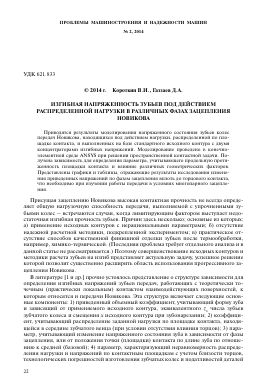
Винтовой зуб колеса Новикова заменяли эквивалентным прямым, а активную ножку парного колеса заменяли индентором, рабочая поверхность которого состоит из точек гиперболического типа, имеющих в контакте профильный радиус р^ кривизны (вогнутая
часть) и приведенный главный продольный радиус рр кривизны (выпуклая часть). Угол наклона линии действия нормальной силы Fn = F/cosak к оси симметрии головки зуба
зубчатого колеса равен п/2 — 9, где расчетный угол 9 = ak + 2[ l* + (x* — x*) ctgak ]/zu, ak, l*, x* — параметры исходного контура [5]. Такая модель обеспечивала достаточную объективность результатов.
На рис. 1 показан общий вид индентора, где K одна из теоретических точек контакта гиперболического типа. На рис. 2 и 3 показан контакт индентора 1 с исследуемым зубом 2, а на рис. 3 дан этот контакт в различных фазах зацепления (по AA повернуто), характеризуемых перемещением контактной точки K от одного торца к другому на текущее расстояние ±S от середины зубчатого венца (а — контакт на торце при S = 0,5bw; б — контакт посредине длины зуба при S = 0; в — общий случай при 0 < S < 0,5bw).
Моделирование проводили в конечно-элементном пакете ANSYS. Был разработан комплекс программ на макроязыке APDL для пакета ANSYS версии 11.0 и выше, позволяющих решать рассматриваемые задачи с введением параметрических входных данных. При моделировании в приповерхностном слое обоих контактирующих тел была выделена зона регулярного разбиения, которая в виде соответствующих эквидистантных поверхностей углублялась внутрь тел на некоторую величину. Для построения самой поверхности зуба была использована сплайн-интерполяция второго порядка. Конечно-элементная модель была сформирована с применением квадратичных элементов SOLID95 и контактной пары C0NTA174—TARGE170. Граничные условия для зуба 2 остались аналогичными таковым в задаче о действии на зуб сосредоточенной силы [2].
Для индентора 1 ставили следующие граничные условия: нагрузку прилагали к верхней поверхности индентора, которая перемещалась параллельно самой себе стро-
го в направлении действия нормальной силы, т.е. по нормали к поверхности зуба 2 в точке K.
В табл. 2 (m = 1 мм, Ар = 0,2, b* = 20, х* = 0, S* = 0) показаны результаты моделирования максимальных по профилю зуба приведенных единичных напряжений YVEp от распределенной нагрузки и расчета коэффициента Ya, учитывающего эту распределенность и равного Ya = YVEp/YVE.
Приведенное напряжение YVEp можно представить как [2, 3] YVEp = Ф^^, где YVp
напряжение растяжения; множитель ф^ = YVpJ( YVp/J 1 - ц + ц2 ); YVp3 — единичное эффективное напряжение от действия распределенной нагрузки; ц — коэффициент Пуассона.
Моделирование показало, что основное влияние на исследуемый параметр Ya оказывают продольная протяженность площадки контакта, которая заменена условным эллипсом с рассчитываемой по Герцу величиной a** большой полуоси, и число zu зубьев.
Здесь необходимо заметить следующее. В действительности площадка контакта отличается от эллипса, а ее продольная протяженность несколько превышает герцев-скую величину, что связано с влиянием деформации изгиба зуба. Однако корреляция между полудлиной реальной площадки контакта и расчетной величиной a** настолько тесная, что вполне допустимо в расчетах параметр Ya как функцию поставить в зависимость от аргумента a**, вычисленного по Герцу [1] и являющегося точкой отсчета
a* = Па[ 1,5nFnpJi 1 + Сар)]1/3, при 0,01 < Сар < 0,1, ^ = 0,94945Са°р39947,
-0 39010 2 2
при 0,1 < Сав < 0,4, na = 0,97016Сар , п = ( 1 - Ц2)/Е + ( 1 - ЦгУ^-
Принимая ц = ц = ц2 = 0,3 модуль упругости E = El = E2 = 2 ■ 105 МПа, получим П = 9,1 ■ 10-6 МПа-1.
Отношение главных приведенных радиусов кривизны Сар = Ро/Рр, где приближенно Ра = Pa ' Р//Ар, Ар = pf- pa; pa - радиус головки зуба [5].
Так называемым фактором изгибной напряженности в статье названа величина X = F/m2, являющаяся множителем при переводе единичного напряжения в действующее CTvEp = X ■ YvEp.
№ Исходные данные Результаты моделирования
z.u Рр, мм F ,, Н * a H yve YVEp Ya
1 500 10 0,5324 0,590 0,998
2 50 1000 0,9380 0,577 0,976
3 9 250 400 1,371 0,591 0,552 0,934
4 250 1000 1,861 0,512 0,866
5 1000 500 2,596 0,452 0,765
6 1000 2000 4,1
Для дальнейшего прочтения статьи необходимо приобрести полный текст. Статьи высылаются в формате PDF на указанную при оплате почту. Время доставки составляет менее 10 минут. Стоимость одной статьи — 150 рублей.