МЕХАНИКА ТВЕРДОГО ТЕЛА № 6 • 2013
УДК 531/534
© 2013 г. В. А. БЕЛЕНЬКИЙ
К ВОПРОСУ НЕВОЗМУЩАЕМОСТИ ИНЕРЦИАЛЬНЫХ СИСТЕМ
Рассматривается теория невозмущаемости инерциальных систем нового класса, построенных на базе усовершенствованных гиромаятников.
Ключевые слова: гиромаятниковая инерциальная система, усовершенствованный гиромаятник.
Возможность создания невозмущаемого гиромаятника впервые была рассмотрена М. Шулером [1]. Как следует из теории работы невозмущаемого гиромаятника в конечных углах [2] положение равновесия гиромаятника, настроенного на период Шулера, определяется выражением tga = V/ (Rra00), а не a = Vl(R&00), где а — скоростная девиация, V/R — горизонтальная составляющая абсолютной угловой скорости объекта, ю00 — частота Шулера, R — радиус Земли, принятой за однородный шар. Вследствие этого невозмущаемый гиромаятник, настроенный на период Шулера, строго говоря, является возмущаемой системой.
В работах [3, 4, 5] предлагаются пути расширения возможности гиромаятниковых систем.
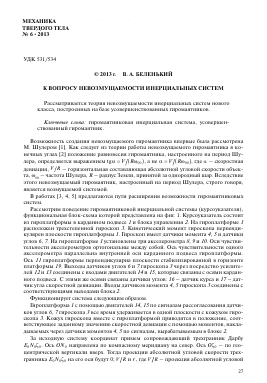
Рассмотрим поведение гиромаятниковой инерциальной системы (курсоуказателя), функциональная блок-схема которой представлена на фиг. 1. Курсоуказатель состоит из гироплатформы в карданном подвесе 1 и блока управления 2. На гироплатформе 1 расположен трехстепенной гироскоп 3. Кинетический момент гироскопа перпендикулярен плоскости гироплатформы 1. Гироскоп имеет датчики момента 4, 5 и датчики углов 6, 7. На гироплатформе 1 установлены три акселерометра 8, 9 и 10. Оси чувствительности акселерометров ортогональны между собой. Ось чувствительности одного акселерометра параллельна внутренней оси карданного подвеса гироплатформы. Ось 11 гироплатформы перпендикулярна плоскости стабилизированной в горизонте платформы 19. Выходы датчиков углов 6 и 7гироскопа 3 через посредство усилителей 12 и 13 соединены с входами двигателей 14 и 15, которые связаны с осями карданного подвеса. С этими же осями связаны датчики углов: 16 — датчик курса и 17 — датчик угла скоростной девиации. Входы датчиков момента 4, 5 гироскопа 3 соединены с соответствующими выходами блока 2.
Функционирует система следующим образом.
Гироплатформа 1 с помощью двигателей 14, 15 по сигналам рассогласования датчиков углов 6, 7гироскопа 3 все время удерживается в одной плоскости с кожухом гироскопа 3. Кожух гироскопа вместе с гироплатформой приводятся в положение, соответствующее заданному значению скоростной девиации с помощью моментов, накладываемых через датчики моментов 4, 5 по сигналам, вырабатываемым в блоке 2.
За исходную систему координат примем сопровождающий трехгранник Дарбу E0N0Z0. Ось ON0 направлена по компасному меридиану на север. Ось O^o — по геоцентрической вертикали вверх. Тогда проекции абсолютной угловой скорости трехгранника E0N0Z0 на его оси будут 0; V/R и r, где V/R — проекция абсолютной угловой
14
п
1
2
Фиг. 1
скорости трехгранника E0N0Z о на ось ON0; r — проекция абсолютной угловой скорости трехгранника E0 N0Z 0 на ось OZ 0.
Проекции ускорения вершины трехгранника E0N0Z0 на его оси OE0 и ON0 следующие V, rV. Проекция силы тяжести на ось OZ0 будет -g = - (g0 - V2/R
На фиг. 2 представлена структурно-кинематическая схема. С гироплатформой свяжем правую систему координат E/N/z\. Динамика свободных колебаний курсоуказа-
теля характеризуется отклонениями гироплатформы вокруг осей OE\ и ON\ относительно ее положения равновесия в установившемся режиме. Погрешность гироплатформы вокруг оси OE{ обозначим Да (Да — погрешность выработки скоростной
девитации а). Погрешность гироплатформы вокруг оси OnI обозначим \К{, она определяет погрешность выработки курса объекта A K:
АК = АКх/ sin а
Систему координат e\n\Z\ получим путем поворота системы координат E0N0Z0 вокруг оси OZ 0 на угол А К, образуя систему координат Ех Nx Z х, и поворотом вокруг оси OEX на угол а (см. фиг. 3).
Сохраняя члены первого порядка малости, выпишем проекции абсолютной угловой скорости трехгранника е/n/z 1 на его оси OE{ и ON\:
Фиг. 2
Фиг. 3
Q„i = á + — AK, Q_.1 = AKTi + Vcos a + r sin a
E R N 1 R
Сигналы акселерометров по осям OEj1, ON1i и OZi запишутся так:
WEi = -V - rVAK, WNi =-(rV cos a + g sin a), W^i =-g cos a + rV sin a
Управляющие сигналы гироскопа Q Eioper и Q Nioper будем создавать таким образом, чтобы при невозмущаемости системы на маневрировании обеспечивать положение равновесия системы AKi = AK = 0; Aa = 0. В этом случае
t nV a inst — a tr — arctg-
Я®00
где ю00 = у/ К, п — параметр системы, определяющий величину скоростной девиации курсоуказателя а.
На этом принципиальном вопросе следует остановиться подробно. Создадим управляющие сигналы гироскопа, например, следующие:
П М7 ■
"EÍoper = - ^^ WEÍ -(а insttg «inst
Q
®00
sin а inst + R— (( sin а inst - W^cos a inst )cos а i
N,i0per =-sin а inst
Ni0per n Rrn00
где a inst — показания датчика угла 17:
nV
a inst = a tr + Да, а tr = arctg
Ära,
00
Значение скоростной девиации а ¡ш1 можно определить и другими путями, напри, по показаниям а
к/я^о/ я - к V К2
мер, по показаниям акселерометров WNi и W^i с учетом уравнения связи tgatr
из соотношения
2 2
wní sin a inst + Wzicos «inst + g0 —2 n cos 2a inst2-= 0 (1)
i sin ainst + n cos ainst
Чтобы не усложнять поставленной задачи исследования свободных колебаний курсоуказателя, будем полагать, что стабилизированная в горизонте платформа 19 все время совпадает с системой координат E0N0Z0. Тогда
ainsttg ainst
/
nV sin2 a| + ACtg2a
VR®00 Jtr
2
®00 • ¡V \ , Vcos a л —00 sin a inst = I — cos a) +---Aa
n \R /tr R sin a
—— IWi sin ainst — W ri cos a inst )cos a inst _ (r sin a)--Aa
Rro00 v Zi Ni ' cos a
. 2
Уравнения функционирования гироплатформы курсоуказателя запишем в форме 1 = 1 ; Г1 = л или, подставляя выражения для О 1; О 1 ; О ,; О , ,
Е Е10рег N ^орег Е1 Еррег N1 ^орег
получим:
R sin а
Ra
'00 У tr
, . . , V AK1 i nKcos а I . ■ ,2 n atr + Aa + —:—- = I-I - Aatg а +-:-rVAK1
Ra00 sin a
AKTi + (Vcos а) - Vsin «A« + (r sin а) + r cos «A« =
1 Ir Ar R tr
= ^cosа) + A« + (rsinа) -r^^A«
tr cos а
(V'
R
/tr R sin а
Эти уравнения ошибок можно представить и в более удобном виде.
AQno - r1 AQeo = 0, AíÍEo- r |AQno = 0
AQeo = V AK, AQNO
R
(2)
n cos a
где AQe и — характеризуют ошибки выработки проекций горизонтальной со-
ставляющей угловой скорости объекта на оси OE0 и ON0.
Установим дополнительную аналогичную гироплатформу в двухосном подвесе 1 на стабилизированную платформу 19 (см. фиг. 2), управляющие сигналы гироскопа которой будут обеспечивать положение равновесия системы A K2 = 0 и Да2 = 0. При этом
ainst2 - atr2 - arctg
nV Rra,
00
Можно показать, что уравнения ошибок для этой гироплатформы будут
AííN02- — + rlAQEoi = 0, AQe02 + ^ + r !AQn02 = o
(3)
Поведение совместно функционирующих платформ будут определяться уравнениями ошибок:
AÛ N - r AÛ E + ^ AÛ E = 0, AÛ N - r AÛ E + ^ AÛ E = 0 n n
-AÛ E - r AÛ N + ^ AÛ N = 0, -AÛ E - r AÛ N + ^ AÛN = 0
(4)
где AQE = V (AK - AK2) — автономно наблюдаемая обобщенная координата
Ail N =
AQnq + AÍNo2 2
AQN =
AÍNo -AÍNo: 2
m F =
ЛР.Е, + ЛОЕ02
лпе =
ЛРер - ЛОЕ02
2 2 Характеристическое уравнение системы (4) будет
A = 54 + 2
2
Ю00 + „ 2
n
52 +
( 2 Л2 ю00 - 2 2
n ,
где — оператор Лапласа. Корнями этого характеристического уравнения являются величины
М-1,2,3,4 =±1 (®оо/п ± г) • (5)
Корнями характеристического уравнения всех известных невозмущаемых инерци-альных систем являются
М-1,2,3,4 =± (»00 ± Г) (6)
Из выражений (4), (5), (6) следует, что невозмущаемость рассмотренного гирокур-соуказателя при наличии информации о направлении геоцентрической вертикали может обеспечиваться практически при любом значении частоты собственных колебаний. Реализовать достоинства рассмотренного гирокурсоуказателя целесообразно в рамках бесплатформенного исполнения. Программное обеспечение бесплатформенной системы может для одного и того же комплекта чувствительных элементов одновременно вести несколько моделей рассмотренного гирокурсоуказателя с различными динамическими свойствами.
СПИСОК ЛИТЕРАТУРЫ
1. Шулер М. Die Störung von Pendel- und Kreiselapparaten durch die Beschleunigung des Fahrzeuges // Physikalische Zeitschrift. 1923. V. XXIV. С. 344-350.
2. Беленький В.А. К вопросу о невозмущаемости гироскопического маятника // Гироскопия и навигация. 2009. № 3 (66). С. 56-58.
3. Беленький В.А. Патенты РФ: № 2247944 (дата приоритета на изобретение 20.02.2003 г.), № 2247324, № 2251078, № 2256879, № 2257545, № 2272995, № 2309384, № 2315956, № 2346240.
4. Belenkiy V.A. European Patent Application, Pub. No.: EP1852681 A1. Pub.Date: 07.11.2007; Be-lenkiy V.A. Chinese Patent No.: 200580048500.1. Date of Patent: February 15, 2012; Belenkiy V.A. United States Patent, Patent No.: US 7,933,717B2. Date of Patent: Apr. 26, 2011.
5. Беленький В.А. Инерциальная система с линейной коррекцией // Сб. докл. 14-я Междунар. конф. по интегрированным навигационным системам. 2007. СПб.: ЦНИИ "Электроприбор".
Москва Поступила в редакцию
e-mail: oasi@bk.ru 10.06.2010
Для дальнейшего прочтения статьи необходимо приобрести полный текст. Статьи высылаются в формате PDF на указанную при оплате почту. Время доставки составляет менее 10 минут. Стоимость одной статьи — 150 рублей.