ПРОБЛЕМЫ МАШИНОСТРОЕНИЯ И НАДЕЖНОСТИ МАШИН
№ 4, 2015
МЕХАНИКА МАШИН
УДК 621.805 8-8
© 2015 г. Крейнин Г.В.1, Мисюрин С.Ю.2 К ВЫБОРУ ТИПА ПРИВОДА СИЛОВОГО БЛОКА МЕХАТРОННОЙ СИСТЕМЫ
1 Институт машиноведения им. А.А. Благонравова РАН, г. Москва 2 Национальный исследовательский ядерный университет "МИФИ", г. Москва
Основные типы двигателей, технологических приводных систем, оцениваются по удельной мощности, эффективности, первоначальной стоимости, быстродействию, надежности, точности, пожаро- и взрывобезопасности, удобству обслуживания и ремонта, тепловому режиму, воздействию на окружающую среду, управляемости, простоте стыковки с цифровой системой управления. Обсуждается систематизированная процедура выбора рациональных параметров приводной системы с электрическим, гидравлическим и пневматическим двигателем.
В атоматизированном технологическом оборудовании, роботах, манипуляторах и других системах применяются приводы различных типов, в первую очередь, с электрическими, гидравлическими или пневматическими двигателями [1, 2]. Во многих случаях решение о выборе того или иного двигателя является далеко не однозначным и требует предварительного, всестороннего анализа. Этому способствуют сравнительные оценки двигателей. Кроме того, следует учитывать, что двигатель входит в приводную систему вместе с передаточным механизмом и системой управления. Поэтому после определения типа двигателя возникает проблема выбора параметров двигателя и остальных элементов приводной системы. Для этого предлагаем систематизированную процедуру синтеза, которая носит интерактивный характер.
Приводной системой (приводом) называют устройство, служащее для преобразования подводимой к нему электрической, гидравлической, пневматической или другой первичной энергии в механическую работу исполнительного органа технологической машины. Простейший привод состоит из двигателя, управляющего органа — распределителя и системы управления (рис. 1) [3].
Преобразователем первичной энергии в механическую работу является двигатель. В электродвигателе электрическая энергия переходит в работу вращения ротора; в гидроцилиндре или гидромоторе энергия рабочей жидкости переходит в работу поршня или ротора; то же самое в пневмоцилиндре или пневмомоторе.
Распределитель управляет потоками первичной энергии, подводимой к двигателю и отводимой от него (в том числе теряемой). В электроприводе распределителем слу-
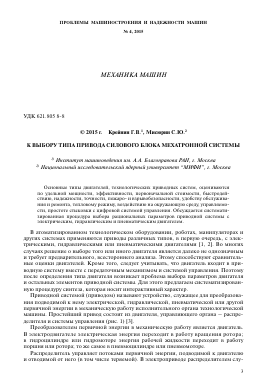
Рис. 1. Механическая работа (1), сигнал обратной связи Yос (2), потери энергии (3), задающий сигнал Y (4)
ж, x
t
Рис. 2. Последовательно: 1 — транспортный цикл, 2 — силовой, 3 — цикл подачи, 4 — цикл зажима; сплошная линия — зависимость F(t), пунктирная — x (^
жит силовой или частотный преобразователь, реостат; в гидро- и пневмоприводе распределителем служит клапан и т.д.
Система управления генерирует сигналы u, подаваемые на управляющие входы распределителя, согласно поступающей на вход системы управления информации в виде задающих сигналов и сигналов обратной связи Уос. Формируемые в системе управления сигналы u могут иметь различную форму: от простейших релейных команд на переключение распределителя из одного устойчивого состояния в другое до сложных переменных сигналов, направленных на регулирование скорости, движущей силы, на перемещение рабочего органа из одной позиции в другую и т.п.
Некоторые характерные последовательности законов движения (циклы) приводов технологических машин представлены на рис. 2 (Б — силовой фактор, х — скорость, ? — время).
Транспортный цикл. Состоит из этапов разгона, движения с постоянной (или переменной) скоростью и торможения. Максимум рабочей силы обычно приходится на первый этап, когда преодолеваются в том числе статические силы сопротивления. Скорость транспортировки объекта на втором этапе может быть достаточно большой и не обязательно постоянной.
Силовой цикл. После этапа разгона следует сравнительно короткий этап быстрого подвода, завершающийся основным этапом — созданием значительной рабочей силы. Жесткие требования к характеру изменения скорости отсутствуют, но могут быть особые требования к характеру силового воздействия.
Цикл подачи. Этапы те же, что и в цикле транспортировки, но предъявляются жесткие требования к равномерности движения, к силовому воздействию; также предусматривается возможность настройки привода на разные скорости подачи.
Цикл зажима (прижима). Большая рабочая сила в конце движения. Она является критической величиной при выборе параметров исполнительного устройства. Ско-
Таблица 1
Показатели Тип привода
Электро Гидро Пневмо
Удельная мощность [+] []
Эффективность [+] []
Первоначальная стоимость [] [+]
Быстродействие [-] [ ] [+]
Надежность [ ] [+]
Точность [+] [ ] [-]
Пожаро- и взрывобезопасность [] [+]
Удобство обслуживания [] [+]
Тепловой режим [] [+]
Воздействие на окружающую среду [+] []
Управляемость [+] [] [-]
Простота стыковки с цифровой системой управления [+] []
Таблица 2
Показатели Тип привода
Электро Гидро Пневмо
Удельная мощность, кВт/кг КПД 0,02-0,2 0,7-0,9 0,5-1,0 0,7-0,8 0,3-0,4 0,05-0,2
рость на этапе подвода может быть достаточно большой, на этапе создания рабочей силы — малой.
Представленные циклы не охватывают все их многообразие. Кроме того, циклы характеризуются различными законами управления движением и силового воздействия привода.
Сравнительные оценки приводов. Различают случаи, когда выбор типа привода предопределен каким-либо одним или несколькими решающими факторами, и когда имеется возможность выбора одного из нескольких альтернативных вариантов. И в том, и в другом случаях целесообразно обратиться к табл. 1, где условными знаками представлены приоритеты трех типов приводов по различным показателям.
Удельная мощность двигателя. Показатель Ж удельной мощности двигателя определяет размеры, массу и, в определенной степени, сложность двигателя. Все эти параметры улучшаются с ростом Ж. Из табл. 1 видно, что наименьшие габариты и массу имеет гидродвигатель; количественные значения Ж для двигателя приведены в табл. 2.
Предел повышения Ж ограничен физическими возможностями концентрации мощности в единице занимаемого двигателем объема (или рабочей силы, приходящейся на единицу активной площади рабочих элементов), конструктивными особенностями и параметрами материалов, из которых двигатель изготавливается.
Для гидро- и пневмодвигателей первый фактор характеризуется величиной давления рабочего тела. В гидросистемах давление жидкости 15 МПа считается обычным; в специальных случаях оно доходит до 100 МПа и более. Давление в заводских сетях сжатого воздуха не превышает 1 МПа, в реальных же условиях оно обычно поддерживается на уровне 0,4—0,7 МПа.
Поскольку в гидро- и пневмосистемах носителем первичной энергии является находящееся под давлением рабочее тело, то для преобразования этой энергии в механическую работу достаточно иметь рабочую, герметичную камеру с подвижной стенкой (поршнем, лопастью, зубцом и т.п.), определяющей активную площадь. Масса такой
камеры зависит только от ее геометрических размеров и прочности материалов стенок.
Высокие значения W для гидродвигателя определили области его применения — технологические механизмы с большими силовыми и массовыми нагрузками, такие как механизмы подачи в металлорежущих станках, механизмы прессов, машин для литья под давлением, металлургического оборудования, тяжелых робототехнических систем, строительных и дорожных машин и т.д.
Движущий момент или движущая сила в электродвигателе создается в результате взаимодействия магнитных и электрических полей, для создания которых приходится применять специальные достаточно тяжелые конструкции элементов, обладающих магнитными, токопроводящими, изоляционными и др. свойствами. При использовании обычных магнитных материалов удается получить силы на единицу активной площади взаимодействующих элементов, эквивалентные приблизительно давлению в пневмосистемах. Новые магнитные материалы, основу которых составляют редкоземельные металлы, позволяют значительно улучшить показатель W. По некоторым данным, при переходе на самарий-кобальтовые магниты можно построить электродвигатель, имеющий значение W такого же порядка, как гидромотор, работающий на давлении 15—30 МПа. В еще более далекой перспективе можно ожидать появление особо легких электродвигателей, использующих эффект сверхпроводимости. Однако на сегодняшний день приходится ориентироваться в основном на значения W, приведенные в табл. 2.
При сравнении вращательных двигателей по показателю W следует иметь в виду, что в реальных условиях они (в первую очередь электрические и пневматические) используются в сочетании с зубчатыми или другими редукционными механизмами. В исполнительном узле, состоящем из двигателя и редуктора, с ростом оборотов растет и требуемое передаточное отношение редуктора, если считать частоту вращения выходного вала заданной. Если с ростом номинальной частоты вращения вала двигателя размеры его уменьшаются, то масса и размеры редуктора возрастают. Существует некоторое оптимальное значение номинальной частоты вращения вала двигателя, при которой исполнительный узел в целом будет иметь наилучший показатель W.
Для таких механических узлов мощностью до нескольких киловатт ориентировочно можно принять следующие границы изменения W: для узла с электродвигателем от 0,003 до 0,06; с гидродвигателем от 0,05 до 0,6; с пневмодвигателем от 0,03 до 0,1 кВт/кг. При этом следует иметь в виду, что существуют высокомоментные тихоходные гидромоторы (как правило — радиально-поршневые), которые обеспечивают работу исполнительного узла на малых оборотах напрямую без использования редуктора; показатель Wдля них несколько хуже по сравнению с высокооборотными двигателями.
При сопоставлении приводов с двигателем линейного движения следует учитывать, что гидро- или пневмоцилиндр (а также другой тип двигателя с линейным перемещением рабочего органа) позволяет получить линейное движение выходного звена без использования механизмов преобразования. Тем не менее в технологических машинах и станка
Для дальнейшего прочтения статьи необходимо приобрести полный текст. Статьи высылаются в формате PDF на указанную при оплате почту. Время доставки составляет менее 10 минут. Стоимость одной статьи — 150 рублей.