Автоматика и телемеханика, № 5, 2015
© 2015 г. В.И. УТКИН, д-р техн. наук (utkin.2@osu.edu) (Университет Огайо, Колумбус, США)
КОРОТКИЙ КОММЕНТАРИЙ К МЕТОДУ А.Ф. ФИЛИППОВА ПРОДОЛЖЕНИЯ РЕШЕНИЯ НА ГРАНИЦЕ РАЗРЫВА
Классические теоремы о существовании и единственности решения неприменимы к дифференциальным уравнениям, правая часть которых является разрывной функцией вектора состояния. Такая ситуация возникает в системах с разрывными управлениями со скользящими режимами, когда траектории в пространстве состояний принадлежат поверхностям разрыва. Для описания скользящих режимов или продолжения решения на границе разрыва различными авторами были предложены свои методы получения дифференциальных уравнений. В силу неопределенности правой части исходных уравнений на границе разрыва предложенные методы приводили к различным решениям. В статье сопоставляются эти методы, обсуждаются причины неоднозначности и высказывается предположение о том, что любое из решений может быть получено с помощью метода А.Ф. Филиппова.
1. Введение
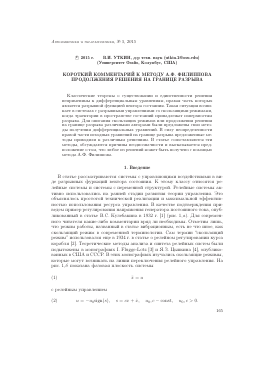
В статье рассматриваются системы с управляющими воздействиями в виде разрывных фуркаций вектора состояния. К этому классу относятся релейные системы и системы с переменной структурой. Релейные системы активно использовались на ранней стадии развития теории управления. Это объяснялось простотой технической реализации и максимальной эффективностью использования ресурса управления. В качестве подтверждения приведем пример регулирования напряжения генератора постоянного тока, опубликованный в статье В.С. Кулебакина в 1932 г. [1] (рис. 1,а). Для современного читателя какие-либо комментарии вряд ли необходимы. Отметим лишь, что режим работы, названный в статье вибрационным, есть не что иное, как скользящий режим в современной терминологии. Сам термин "скользящий режим" использовался еще в 1934 г. в статье о релейном регулировании курса корабля [2]. Теоретические методы анализа и синтеза релейных систем были подытожены в монографиях I. Flugge-Lotz [3] и Я.З. Цыпкина [4], опубликованных в США и СССР. В этих монографиях изучались скользящие режимы, которые могут возникать на линии переключения релейного управления. На рис. 1,б показана фазовая плоскость системы
(1) X = u с релейным управлением
(2) u = — u0sign(s), s = cx + X, uo,c — const, uo,c> 0.
Рис. 1. а - Вибрационное управление; Ь - релейное управление в системе второго порядка.
Вектор состояния (х, X) попадает на линию в = 0 после конечного интервала времени и не может покинуть ее. Это движение называется скользящим режимом. Уравнение линии переключения сх + X = 0 используется в качестве уравнения движения. Его решение зависит только от уравнения линии переключения и не зависит от свойств объекта управления.
Свойство независимости, или инвариантности, активно использовалось в 60-х гг. XX в. в системах с переменной структурой, когда поведение системы изучалось в пространстве регулируемой величины и ее производных. В отличие от релейных систем в системах с переменной структурой амплитуда управляющего воздействия ио зависела от вектора состояния. Все эти факты давно и хорошо известны и приведены здесь лишь с одной целью - объяснить, почему в таких системах возникла необходимость в развитии новых математических методов. Даже в простейшем примере второго порядка (1), (2), по крайней мере, с формальной точки зрения вопрос об описании движения в
Рис. 2. Доопределение Филиппова.
скользящем режиме остается открытым. Дело в том, что для разрывной системы константа Липшица не существует, и тогда классические теоремы о существовании и единственности решения неприменимы. Предложенное выше решение ж(*) = Жов-с* уравнения сж + ж = 0 также вызывает сомнения. Действительно, если эта функция является решением, то она должна обратить уравнение (1) в тождество, но не ясно, чему равна функция sign(s) = sign(0) в правой части этого уравнения.
В статье [5] А.Ф. Филиппов предложил свой метод продолжения решения на границе разрыва для систем с разрывной правой частью
/о\ • Г f+(ж,*), если «(ж) > 0, „I „„ „
(3) ж = ^ •',_) ',(' ) С ' ж,/ + ,/ € Яп, 8 € Я. у 7 | / (ж,*), если «(ж) < 0, '
Ограничимся пока упрощенной формулировкой метода Филиппова (рис. 2).
Вектор /зт в правой части уравнения скольжения ж = /зт по поверхности « (ж) = 0 находится на выпуклой оболочке векторов / + и / _ - прямая линия, соединяющая концы этих векторов (рис. 2) /зт = / + + (1 — _, 0 ^ ^ ^ 1. При движении по поверхности в (ж) = 0 вектор /зт лежит в касательной плоскости и находится на ее пересечении с выпуклой оболочкой, а коэффициент ^ находится из уравнения ^гаё(«)]т/8т = 0.
По сути, метод Филиппова постулирует уравнение скольжения. В ряде работ предлагались другие методы описания этого вида движения. Обсуждению различных подходов и их сопоставлению и посвящена эта короткая заметка.
2. Постановка задачи
Поведение конечномерной системы с векторным управлением описывается уравнением
(4) ж = /(ж,*,и), ж,/ € Яп, и € Ят.
Подобно простым примерам в разделе 1 предполагается, что каждая компонента управления является разрывной функцией состояния системы:
,г\ \ и+(ж,*), если «¿(ж) > 0, .
(5) иг = < ' ( ; ( _ г = 1,...,т.
I иг (ж,*), если «¿(ж) < 0,
Рис. 3. Скользящий режим на пересечении поверхностей разрыва.
Скалярные функции «¿(ж) являются непрерывно дифференцируемыми, и решение (4) для любой из функций и±(ж, ¿) существует и является единственным. В системах (4), (5) скользящие режимы могут возникать как на каждой из поверхностей «¿(ж) = 0, так и на их пересечении «¿(ж) = 0, вт = («1,..., вт) (рис. 3).
Далее обсуждаются вопросы, как найти уравнения, описывающие такие скользящие режимы, являются ли эти уравнения единственными, если нет, как обосновать выбор того или иного уравнения для описания реальных процессов.
3. Системы со скалярным управлением
Казалось бы, система (4), (5) со скалярным управлением и € Я эквивалентна системе (3), рассмотренной Филипповым, /+(ж,£,и+), /-(ж,£,и-). Однако сам факт наличия управления породил множество способов получения уравнений скольжения, которые были продиктованы весьма естественными инженерными соображениями. Например, релейное управление может быть заменено линейным кв с последующим стремлением коэффициента к к бесконечности [4], поскольку входная величина релейного элемента в близка к нулю (траектория принадлежит поверхности в(ж) = 0), а выходная принимает конечные значения. Для линейных систем предлагалось выписать решение относительно в(£) в форме конволюции и найти непрерывное управление, обеспечивающее тождество в(£) = 0 [6]. Еще один способ основывался на замене разрывного управления непрерывным, таким, что в(ж)=0 [7]. Оказалось, что эти методы могут приводить к различным уравнениям скольжения и порой к довольно жестким дискуссиям относительно правомерности того или иного результата.
Приведем пример, который в свое время породил сомнения в правомерности метода Филиппова:
ж = Аж + Ьи1 + ^и2, и1 = — M1sign(в), и2 = —M2sign(в).
Оба управления претерпевают разрывы на одной и той же поверхности в (ж) = сж = 0 (А, Ь, М1, М2, с - константы). Уравнения скольжения могут быть, на первый взгляд, однозначно найдены методом Филиппова для / + = = Аж — ЬМ1 — ^М2, /- = Аж + ЬМ1 + ^М2. Предположим теперь, что и2
Рис. 4. Уравнения скольжения в системе с двумерным управлением.
реализовано с помощью реле с небольшим гистерезисом и Mi ^ M2. Тогда скользящий режим возникает при любом значении U2 = M2 или U2 = — M2. Действуя методом Филиппова, уравнения скольжения могут быть получены для f + = Ax — bMi + du2, f- = Ax + bMi + du2. В зависимости от начальных условий U2 может принимать одно из двух возможных значений и остается постоянным.
Полученная неоднозначность и явилась причиной сомнений. На самом деле эти сомнения легко устраняются, если аккуратно применить рекомендацию Филиппова (в отличие от упрощенной формулировки, приведенной в разделе 1):
(6) x = fsm, fsm(x, t) € lim conv f (x + ¿x, t, u + ¿x)\N,
conv f (x + ¿x,t, u) означает минимальную выпуклую оболочку по всевозможным значениям управления в окрестности ||^x|| < е, символ \N означает, что из этой окрестности нужно исключить множество нулевой меры, каковым является поверхность разрыва. В рассматриваемом примере таких векторов четыре, соответствующих различным комбинациям ui и U2. Минимальной выпуклой оболочкой этих векторов является четырехугольник (рис. 4), и его пересечение с касательной плоскостью (прямая в случае системы второго порядка) определяет множество всевозможных уравнений скольжения. Это множество включает рассмотренный выше случай, когда в скользящем режиме управление u2 принимает одно из двух возможных значений.
Здесь же уместно отметить, что метод Филиппова имеет весьма простое объяснение. Предположим, что в окрестности рассматриваемой точки правая часть уравнения (4) может принимать одно из k возможных значений fi,..., fk и интервал времени At состоит из k подмножеств Ati,..., Atk, At = = k=i Ati, с значениями правой части fi,..., fk соответственно. Тогда
1 k k At- k
Ai^ü At^" * ^ At
i=i i=i i=ü
Правая часть уравнения есть не что иное, как минимальная выпуклая оболочка векторов /1,..., /.
Таким образом, метод Филиппова, сформулированный как постулат, отражает достаточно очевидный факт: если в окрестности какой-либо точки в пространстве состояний вектор скорости может принимать несколько значений, то в результате переключений правая часть дифференциального уравнения является их минимальной выпуклой оболочкой и какие-либо другие движения появиться не могут. В этом контексте интересно сопоставить метод Филиппова с другими подходами к задаче описания скользящих режимов.
Сначала приведем пример 70-х гг. [7], который показал необходимость такого обсуждения. Нетрудно видеть, что в системе второго порядка
ж 1 = 0,3ж2 + иж1, ж 2 = —0,7ж1 +4и3ж1, и = —sign(ж1,в), в = ж1 + ж2,
в окрестности прямой в = 0 функции в и в имеют противоположные знаки, поэтому на ней возникает скользящий режим. Предварительно было проведено моделирование и рассматривались два случая реализации
Для дальнейшего прочтения статьи необходимо приобрести полный текст. Статьи высылаются в формате PDF на указанную при оплате почту. Время доставки составляет менее 10 минут. Стоимость одной статьи — 150 рублей.