ПРОБЛЕМЫ МАШИНОСТРОЕНИЯ И НАДЕЖНОСТИ МАШИН
№ 4, 2015
УДК 621.01:534.1
© 2015 г. Вульфсон И.И.
КВАЗИСТАЦИОНАРНОСТЬ ДИНАМИЧЕСКИХ РЕЖИМОВ В ЦИКЛОВЫХ МЕХАНИЗМАХ, ОБРАЗУЮЩИХ РЕОНОМНЫЕ КОЛЕБАТЕЛЬНЫЕ СИСТЕМЫ С РЕШЕТЧАТОЙ СТРУКТУРОЙ
Санкт-Петербургский государственный университет технологии и дизайна,
г. Санкт-Петербург
Для цикловых механизмов, образующих вместе с главным валом и исполнительным органом многосекционные колебательные системы с медленно меняющимися параметрами и решетчатой структурой, исследованы условия квазистационарности, при которых собственные частоты сохраняют постоянное значение на протяжении всего кинематического цикла. Анализируется влияние гироскопических составляющих возмущений, возникающих в цикловых механизмах из-за нестационарности связей. Получены скорректированные условия динамической устойчивости при учете квазистационарности.
1. Во многих современных машинах текстильной, полиграфической, легкой и ряда других отраслей промышленности технологические операции выполняются длинными исполнительными органами, совершающими заданное программное движение [1—7]. Для обеспечения достаточной жесткости системы исполнительные органы в таких машинах приводятся в движение многократно сдублированными цикловыми механизмами. При этом колебательная система имеет структуру решетки, в которой каждый повторяющийся элемент образует замкнутый контур, отображающий инерционные и упругодиссипативные характеристики главного вала, исполнительного органа и циклового механизма.
В колебательных системах приводов с цикловыми механизмами кинематические характеристики являются не только источником возмущений, но и формируют нестационарные динамические связи, которые могут привести к нарушению динамической устойчивости. Наиболее известным примером подобного проявления нестационарных связей является параметрический резонанс, при котором на определенных частотных диапазонах система приобретает способность накапливать энергию. Однако отметим, что в машинах с цикловыми механизмами обычно имеет место медленное изменение параметров. При этом реализуемый частотный диапазон параметрического возбуждения существенно удален от наиболее опасного главного параметрического резонанса, а параметрические резонансы высших порядков оказываются подавленными даже при малых диссипативных силах. На практике это нередко приводит к ложному выводу, что влиянием нестационарных связей можно пренебречь. Между тем, как показано в работах [1, 3, 7], в системах с переменными параметрами даже при их медленном изменении возможны локальные нарушения условий динамической устойчивости на конечном отрезке времени. В этом случае, несмотря на то, что зона нарастания колебаний чередуется с зоной затухания, уровень возникающей ампли-
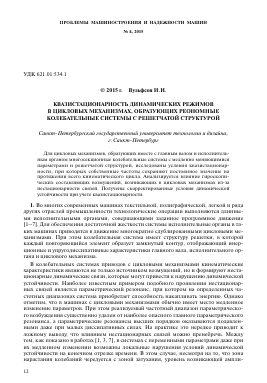
¥1
Ас,
г\п г\п г\п
>2 с2 >2 >2 с2 >2
¥о / = 1 ¥1 / = 2 ¥1 / = 25 - 1 ¥1 / = 2 Рис. 1
тудной модуляции может быть весьма значительным и существенно повысить виброактивность всей системы.
Интересно, что данный эффект имеет характер асинхронного возбуждения, так как в отличие от параметрического резонанса не требует определенной частотной настройки. Были получены критические значения параметров диссипации, выше которых соблюдаются достаточные условия динамической устойчивости. Поскольку при этом система теряет свои наиболее существенные нестационарные свойства, подобные условия можно трактовать как условия квазистационарности. Однако критический уровень необходимой диссипации может оказаться весьма высоким, а иногда даже нереализуемым, поэтому представляет интерес поиск других способов выполнения условий квазистационарности. Ниже один из таких способов использован применительно к цикловым системам, которые схематизированы в виде динамических решеток.
2. На рис. 1, а показаны два механизма, связывающие главный вал с исполнительным органом, схематизированные в виде динамической модели, приведенной на рис. 1, б. Примем следующие условные обозначения: — момент инерции; с — коэффициенты жесткости; — коэффициенты рассеяния; П — оператор, соответствующий функции положения циклового механизма ф2/. = П/(ф1у), где фу, ф2/. — углы поворота входного и выходного звеньев; / — номер механизма. В общем случае эта модель отображает один из модулей динамической модели кольцевой структуры многосекционного привода (рис. 1, в); здесь 5 = 1, ..., п — число секций [1, 3, 4, 7].
Нелинейная функция положения в окрестности программного движения с достаточной точностью трансформируется в характеристику нестационарной связи вида П(ф* + д ) « П(ф*) + П'(ф*)д, где П'(ф*) = йП/йф — первая геометрическая передаточная функция, ф* = Ш.
1
5
ю
В целях большей наглядности и выявления физических предпосылок для реализации условий квазистационарности сначала определим частотные характеристики одиночного модуля (smax = n = 1) в предположении жесткого привода (с0 = да), жесткого механизма (с = да) и отсутствии связей с другими подсистемами (Ас1 = 0, Ас2 = 0). В этом случае динамическая модель трансформируется в систему, состоящую из вала с приведенным коэффициентом крутильной жесткости c* = с1 + c2n'2(9*) и исполнительного органа с приведенным моментом инерции J* = J1 + J2n'2(9*). Эта система имеет две степени свободы, причем одна из обобщенных координат является циклической. Тогда единственная частота свободных колебаний ("собственная" частота) определяется как
р(ф *) = ^с*(ф *) / J * (ф*) = kj[ 1 + СП,2(ф*)]/[ 1 + цП,2(ф*)], (1)
где k = Jcl/J , Z = c2/ci, М = J2/ Ji.
Из-за переменности функции П'(ф*) "собственная" частотаp в общем случае также оказывается переменной, однако при Z = М- имеем p = const. Легко заметить, что это условие совпадает с равенством парциальных частот Jc1/J1 = Jc2JT2 .
Временно исключим из рассмотрения влияние диссипативных и гироскопических сил (см. ниже). Тогда при медленном изменении параметров свободные колебания, согласно ВКБ-приближению первого порядка, описываются как
_ (t \
q = Ajp ( 0) /р (t) sin I J"[p(-) d-] + al. (2)
о
Здесь A0, a — начальная амплитуда и начальная фаза, определяемые начальными условиями.
Формула (2) в дальнейшем используется, чтобы оценить трансформацию колебаний при нестационарных связях и облегчить выявление качественных особенностей системы в рассматриваемой задаче. Заметим, что иногда возбуждению свободных колебаний в механизмах не придается должного значения. Предполагается, что до выхода на установившийся режим свободные колебания полностью затухают из-за воздействия диссипативных сил. Следует, однако, иметь в виду, что это предположение, строго говоря, справедливо только для случаев, когда правая часть дифференциальных уравнений и ее несколько первых производных описываются непрерывными функциями (например, гармоническими). В противном случае на протяжении всего кинематического цикла возникают так называемые свободные сопровождающие колебания, которые затухают и вновь возбуждаются, существенно искажая заданное программное движение рабочих органов [7]. Эти колебания особенно проявляются в кулачковых механизмах. Аналогичная ситуация возникает при соударениях в зазорах.
Зависимость (2) показывает, что при Z ^ М модуляция "собственной" частоты даже при ее медленном изменении может привести к существенному росту амплитуд колебаний. При Z = М на основании (1), (2) имеем p = const. Тогда
q = A0sin (pt + a), (3)
Таким образом, можно предположить, что в первом приближении, несмотря на переменность параметров, сохраняются свойства систем со стационарными связями (квазистационарность). Степень оправданности этого предположения будет обсуждена ниже.
Для другого предельного случая при относительно малой динамической жесткости
привода получаем качественно аналогичный результатр « k1 J2 = const. Если система состоит из двух секций (n = 2; jmax = 3), то при м = Z, c0 —да, c —»- да колебательная система имеет две степени свободы и следующие частотные характеристики
Рис. 2
p1 = k^0,5(3 -75), p2 = k^0,5(3 + л/5). (4)
Этому случаю при k1 =10, П = r0(1 — cosф*), r0 = 1 на графиках функций рг(ф*) (рис. 2, а) соответствуют линии 1. (Здесь и ниже использованы безразмерные нормированные значения частот, равные их отношению к угловой скорости ю.) Коэффициенты формы также остаются постоянными на всем протяжении кинематического цикла:
Pi = 0,5(л/5 - 1), в2 = -0,5(75 + 1).
Нарушение условия ц = Z иллюстрируется на графиках кривыми 2 (ц = 1, Z = 2) и 3 (ц = 4, Z = 1).
Представляет интерес, сохранится ли выявленное свойство и для моделей более сложной структуры. Методы динамического расчета и анализа таких моделей, основанные на теории регулярных систем, подробно рассмотрены в монографии [7]. В рамках данной статьи для иллюстрации ограничимся лишь некоторыми результатами, полученными для модели, показанной на рис. 1, в. При этом приняты следующие исходные данные: Jx = 0,05 кгм2; c1 = c0 = 2 ■ 103 Нм; r0 = 0,75; ц = Z = 0,5; n = 6. Отметим, что эта модель по сравнению с рассмотренной выше представляет собой динамическую решетку, состоящую из шести секций, в которой учтены упругие характеристики механизмов. Графики, приведенные на рис. 2, б, показывают, что и в этом случае наблюдается постоянство частот свободных колебаний при переменных
параметрах системы. Криваяp*, отвечающая функцииp* = Jc[ J + ^П'2(ф *) , разделяет спектр частот на две области: ниже этой кривой форма колебаний описывается тригонометрическими функциями, а выше — комбинацией тригонометрических и гиперболических функций [7].
3. Остановимся на некоторых проявлениях нестационарных связей и физических предпосылках, связанных с рассматриваемым эффектом. Изменение полной механической энергии системы E описывается следующей зависимостью [8]:
" _ + Т +2Т)-I<5>
5 = 1
Х^Н » ^Н -
._х£к_ 1 а]к(ц)Ч]Чк; Т = £. _ 1 а](ф)юЧ/; Т = 0,5«0(ф)2;
; _ 1 £к _ 1 ^к^ ЧАк •
Здесь Т, V — кинетическая и потенциальная энергия; а,к, а, а0 — инерционные коэффициенты; с,к — квазиупругие коэффициенты; д — обобщенные координаты; Qj — непотенциальные обобщенные силы.
Конкретизируем зависимость (5) для рассмотренного выше одиночного модуля
Т = 0,5/*
Для дальнейшего прочтения статьи необходимо приобрести полный текст. Статьи высылаются в формате PDF на указанную при оплате почту. Время доставки составляет менее 10 минут. Стоимость одной статьи — 150 рублей.