ИЗВЕСТИЯ РАН. ТЕОРИЯ И СИСТЕМЫ УПРАВЛЕНИЯ, 2015, № 4, с. 68-93
МОДЕЛИРОВАНИЕ
УДК 62-503.5
МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ УПРАВЛЯЕМОГО ДВИЖЕНИЯ КОЛЕСНОГО ПЯТИЗВЕННОГО ПРЫГАЮЩЕГО РОБОТА © 2015 г. Л. Ю. Ворочаева, С. Ф. Яцун
Курск, Юго-Западный государственный ун-т Поступила в редакцию 06.05.14 г., после доработки 01.12.14 г.
Представлена конструкция пятизвенного колесно-прыгающего робота, предложена методика реализации прыжка в виде последовательности этапов, каждый из которых характеризуется определенными видами движения звеньев. Разработана математическая модель, описывающая прыжок устройства, приведены результаты моделирования его движения, выявлены режимы разгона и приземления робота, а также особенности поведения аппарата в полете от конструктивных и управляющих параметров.
DOI: 10.7868/S0002338815030166
Введение. Достаточно новым и стремительно развивающимся направлением робототехники является создание устройств, перемещающихся с отрывом от поверхности, что объясняется повышенной проходимостью таких объектов при движении по неровной или пересеченной местности и возможностью использования их в военно-разведывательных целях, для обследования зданий, для мониторинга окружающей среды после природных и техногенных катастроф. Особый интерес представляет использование прыгающих аппаратов на других планетах.
Устройства, движущиеся с отрывом от поверхности, служат объектами исследования многих ученых и описаны в работах [1—15]. Крупные инженерные компании, например Boston Dynamics, также создают прыгающих роботов [16].
По принципу движения по поверхности прыгающие аппараты можно разделить на два вида: первые всегда перемещаются только при помощи прыжков как по ровной, так и по пересеченной местности [17, 18], вторые по ровным участкам движутся как колесные платформы, а для преодоления препятствий используют прыжковый модуль [19, 20]. Последний способ перемещения является более высокоскоростным, маневренность устройств за счет движения на колесах повышается, такие аппараты могут более точно позиционироваться перед препятствиями.
Существующие прыгающие роботы различаются по способу позиционирования разгонного модуля относительно поверхности до отрыва от последней и после приземления, а также по способу разгона.
Наиболее часто используемыми способами позиционирования являются поворот корпуса относительно ноги или стопы и поворот разгонного модуля относительно корпуса. Это обусловлено тем, что данные варианты позиционирования позволяют аппарату совершать прыжок под требуемым углом к горизонту за счет обеспечения высокой точности позиционирования и простоты управления приводами, осуществляющими поворот звеньев друг относительно друга.
Разгон прыгающих аппаратов может быть реализован двумя способами: при помощи пар вращательного движения или за счет поступательных пар [21—26]. Разгон за счет пар вращения характерен для прыгающих роботов, конструкции и методика реализации прыжка которых имитируют строение ноги (лапы) человека или животного и их поведение при прыжке [22—24]. Для задания точного направления прямолинейного движения устройства при разгоне используется пара поступательного движения [19, 25, 26].
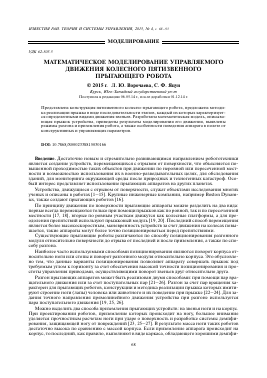
Можно выделить два способа приземления прыгающих устройств: на звенья ноги и на корпус. При проектировании роботов, приземление которых происходит на ногу, большое внимание уделяется прочностным расчетам ноги при ударе о поверхность и разработке системы демпфирования, защищающей ногу от повреждений [23, 25—27]. В результате масса ноги таких роботов достаточно высока по сравнению с массой корпуса. Если приземление аппарата происходит на корпус, то последний, как правило, выполняют в виде каркаса, обладающего хорошими демпфи-
Рис. 1. Расчетная схема прыгающего робота
рующими свойствами. При оснащении корпуса колесами их изготавливают из ударопрочных материалов, способных погасить удар [17, 18, 28—30]. Звенья ноги и стопы при этом существенно легче корпуса и могут втягиваться в него в полете тем же приводом, посредством которого осуществляется разгон, что дает возможность упростить и облегчить конструкцию устройства за счет отсутствия специального привода для втягивания звеньев ноги.
В то же время динамика прыгающих аппаратов, режимы их движения на различных этапах прыжка изучены недостаточно, что не позволяет создавать оптимальные по определенным критериям качества прыгающие роботы.
1. Расчетная схема прыгающего робота. Результаты проведенного анализа положены в основу разработки расчетной схемы и методики расчета основных кинематических и динамических параметров пятизвенного прыгающего робота. В работе рассматривается аппарат, состоящий из прыжкового и колесного модулей, расчетная схема которого приведена на рис. 1. Роботы с аналогичным принципом прыжка были разработаны компанией Boston Dynamics [16, 31]. Прыжковый модуль робота представляет собой пятизвенный механизм, в котором звено 1 — стопа, звенья 2 и 3 образуют ногу, звено 4 является корпусом, звено 5 — опорным элементом. Звенья 1 и 2 соединены между собой приводом вращательного движения 6, звенья 2 и 3 представляют собой поступательную пару, движение в которой обеспечивается приводом 7, звено 3 жестко закреплено в корпусе, который образует со звеном 5пару вращательного движения за счет привода 8. Колесный модуль состоит из четырех колес 9 (на рис. 1 видны только два из них), каждое из которых приводится в движение отдельным приводом.
2. Методика реализации прыжка. Пусть робот прыгает в вертикальной плоскости, а опорная шероховатая поверхность горизонтальная. Будем считать, что прыжок представляет собой последовательность семи этапов к = 1,7, характеризующихся определенными видами движения звеньев (рис. 2) [32, 33]. При этом в момент начала прыжка все колеса аппарата находятся на поверхности и звенья робота неподвижны.
На этапе 1 корпус поворачивается в вертикальной плоскости относительно поверхности до тех пор, пока не будет располагаться под требуемым углом к горизонту. Этап 2 характеризуется
Расположение звена 1 параллельно поверхности
Взаимодействие звена 1 с поверхностью
Расположение звена 4 под заданным углом к горизонту
Устойчивое положение корпуса на поверхности
Отрыв аппарата от поверхности
Начало взаимодействия с поверхностью
Неустойчивое положение корпуса на поверхности
Рис. 2. Этапы прыжка аппарата
поворотом звена 1 до тех пор, пока оно не станет параллельным поверхности. Во время этапа 3 звенья 1 и 2 выдвигаются из корпуса до взаимодействия звена 1 с поверхностью. Этап 4 соответствует разгону устройства за счет поступательной пары, при этом звено 1 находится на поверхности. Этап 5 описывается движением робота с отрывом от поверхности, при этом наблюдается втягивание звеньев 1 и 2 в корпус, а также поворот звеньев 1 и 5 так, чтобы они оказались внутри корпуса. На этапах 6 и 7 происходит приземление объекта на колеса и его позиционирование до тех пор, пока не будет занято устойчивое положение на поверхности, характеризующееся взаимодействием с ней всех колес. Причем этап 7 может наблюдаться только в том случае, если аппарат неустойчив при приземлении, в противном случае после этапа 6 объект готов к реализации следующего прыжка.
При выбранных кинематической схеме и методике прыжка для позиционирования объекта применяются пары вращательного движения, что позволяет разгонному модулю точно позиционироваться относительно поверхности, а для разгона и отрыва от поверхности — пара поступательного движения. Приземление робота на корпус позволяет избежать ударных нагрузок на звенья стопы и ноги, следовательно, данные звенья могут изготавливаться достаточно легкими по сравнению с корпусом и втягиваться в последний во время полета тем же приводом, посредством которого осуществляется разгон. Важная особенность состоит в том, что объект может позиционироваться для реализации следующего прыжка независимо от того, на какую сторону корпуса произойдет приземление.
3. Модель взаимодействия с поверхностью. Будем считать, что при взаимодействии с поверхностью звена 1 нормальная реакция сосредоточена в крайних точках этого звена, сила трения при этом возникает только в одной контактной точке К1 (рис. 3, а). Если контакт звена 1 с поверхностью является точечным, то эта точка служит точкой приложения силы трения и нормальной реакции (рис. 3, б, в).
Положим, что колеса взаимодействуют с поверхностью в точках В1 и В2 (рис. 4, а) или одной из этих точек, если контакт осуществляется одним колесом (рис. 4, б, в). Сила трения в первом варианте будет приложена к точке В1 (рис. 4, а), а во втором — к В1или В2 (рис. 4, б, в).
Если с поверхностью контактируют колесо 9 и звено 5, то будем считать, что в точках В1 и К5 возникают нормальные реакции, а сила трения — только в точке В1 (рис. 5).
Положим, что сила трения описывается моделью сухого трения Кулона [34, 35]. Деформациями колес и поверхности, а также силами сопротивления воздуха в работе пренебрегается.
4. Математическая модель робота. При разработке математической модели будем учитывать следующие допущения. Пусть все звенья робота являются абсолютно твердыми телами, причем
Рис. 3. Точки приложения нормальной реакции и силы трения при нахождении на поверхности звена 1: а — две точки контакта, б, в — одна точка контакта
Р/гВ1\Ж
В
*уу у у уУу,
В
в' —:-
б
9
У У У У У У / У / в в1
Рис. 4. Точки приложения нормальных реакций и сил трения при взаимодействии колеса 9 с поверхностью: а — две точки контакта, б, в — одна точка контакта
звенья 1—3 и 5 представляют собой стержни длиной /1, 12, 13, 15 соответственно, центры масс Ш1 которых расположены в центрах их симметрии С, а звено 4 — прямоугольник А1А2А3А4 размерами 2а х 2Ь, центр масс которого удален на расстояние 14 и угол в от центра симметрии прямоугольника. Длина ноги определяется расстоянием 123 между точками О2 и О4 в проекции на продольную ось корпуса, а положение точки закрепления ноги в корпусе — расстоянием /4 между точками О4 и С4 и углом в между прямой, соединяющей точки С4 и О4, и стороной корпуса А1А4. Звено 5 закреплено в корпусе
Для дальнейшего прочтения статьи необходимо приобрести полный текст. Статьи высылаются в формате PDF на указанную при оплате почту. Время доставки составляет менее 10 минут. Стоимость одной статьи — 150 рублей.