МЕХАНИКА ТВЕРДОГО ТЕЛА № 3 • 2013
УДК 539.3:534.2
© 2013 г. С. М. АФОНИН
МЕХАНИЧЕСКИЕ И РЕГУЛИРОВОЧНЫЕ ХАРАКТЕРИСТИКИ МНОГОСЛОЙНЫХ ПЬЕЗОПРЕОБРАЗОВАТЕЛЕЙ НАНО-И МИКРОПЕРЕМЕЩЕНИЙ
Получены механические и регулировочные характеристики многослойного пьезопреобразователя нано- и микроперемещений при параллельном и кодовом управлении. Определены статические и динамические характеристики простых и многослойных пьезопреобразователей нано- и микроперемещений при продольном и поперечном пьезоэффектах.
Ключевые слова: многослойный пьезопреобразователь, деформация, на-но- и микроперемещение, механические и регулировочные характеристики, параллельное и кодовое управление.
1. Введение. Использование пьезопреобразователей (пьезодвигателей, пьезоактюа-торов) для нано- и микроперемещений перспективно в оборудовании нанотехноло-гии, нанобиологии, микроэлектроники и астрономии для прецизионного совмещения, компенсации температурных и гравитационных деформаций. Увеличение диапазона перемещения до сотен микрометров достигается за счет использования многослойного (составного, пакетного, блочного) пьезопреобразователя, который является одним из наиболее перспективных электромагнитоупругих двигателей нано- и микроперемещений и обеспечивает нанометрическую точность в диапазоне десятков микрометров и полосу пропускания порядка сотни Герц [1—6].
В системе управления нано- и микрометрической деформацией многослойного пьезопреобразователя предъявляются жесткие требования к диапазону перемещений, жесткости и точности пьезодвигателей нано- и микроперемещений. Актуальными в настоящее время являются проблемы обеспечения точности систем управления деформацией многослойного пьезопреобразователя нано- и микроперемещений при параллельном и кодовом управлении и решение этих проблем требует определения соответствующих механических и регулировочных характеристик пьезопреобразова-телей. Применение многослойного пьезопреобразователя с кодовым управлением позволяет эффективно использовать электромеханическое цифро-аналоговое преобразование для нано- и микроперемещений, пропорциональных управляющему коду.
Пьезопреобразователи нано- и микроперемещений обеспечивают пространственное прецизионное позиционирование объектов в оборудовании для нанотехнологии, микроэлектроники. Пьезопреобразователи для приводов нано- и микроперемещений имеют диапазон перемещения от нескольких нанометров до сотен микрометров, чувствительность менее 1 нм/В, нагрузочную способность до 10000 Н, мощность на выходном валу до 100 Вт и полосу пропускания порядка нескольких десятков Герц.
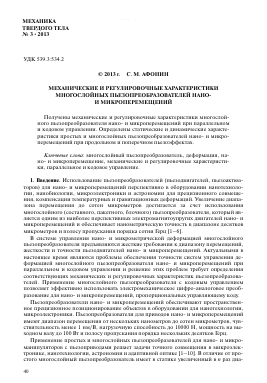
Применение простых и многослойных пьезопреобразователей для нано- и микроманипуляторов с пьезоприводами решает задачи точного совмещения в микроэлектронике, нанотехнологии, астрономии и адаптивной оптике [1—10]. В отличие от простого многослойный пьезопреобразователь имеет в статике увеличенный в п раз диа-
Фиг. 1
пазон перемещения, где п — число пьезослоев пьезопреобразователя. Конструктивное исполнение многослойного пьезопреобразователя зависит от технологии изготовления. Например, многослойный пьезодвигатель выполняется как составной пьезопре-образователь из отдельных пьезопластин с их упругим поджатием, пакетный или блочный пьезопреобразователь из спеченных с применением серебряной пасты пье-зопластин, составной пьезопреобразователь из пьезопакетов с упругим армированием, склеенный многослойный пьезопреобразователь из пьезопластин или как многослойный пьезопреобразователь со слоями, нанесенными по толстопленочной или тонкопленочной технологиям.
Так как предельные разрушающие механические напряжения в пьезокерамике промышленных марок ЦТС или Р/Т на сжатие в среднем в 10 раз по величине превышают предельные разрушающие напряжения на растяжение, то из соображений прочности целесообразно осуществлять предварительное поджатие многослойного пьезопреобразователя с помощью пружины или мембраны. Усилие предварительного поджатия должно превышать максимальную растягивающую нагрузку, чем обеспечивается гарантированное рабочее сжатие многослойного пьезопреобразователя [3, 4]. Многослойный пьезопреобразователь нано- и микроперемещений собирается следующим образом: предварительно сжатый для выбора зазоров между пьезопластинами многослойный пьезопреобразователь стягивается также предварительно деформированным упругим элементом в виде шпильки, пружины или мембраны. Удельное усилие сжатия выбирается порядка 5 МПа. При этом усилии выбираются зазоры и зависимость деформации от внешнего усилия принимает линейный характер.
Основным параметром внешней нагрузки пьезопреобразователя является жесткость нагрузки, т. е. отношение величины силы упругой реакции нагрузки к величине деформации нагрузки.
2. Механические и регулировочные характеристики многослойных пьезопреобразова-телей при параллельном и кодовом управлении. В зависимости от жесткости нагрузки выбираются конструктивные параметры простого пьезопреобразователя при продольном и поперечном пьезоэффекте (фиг. 1, a, 2, a). Для практического использования многослойных пьезопреобразователей необходимо знание их основных характеристик: пьезомодулей, упругих податливостей, пределов временного сопротивления на
Фиг. 2
сжатие [4]. Статические характеристики пьезопреобразователя определяются с учетом уравнения обратного пьезоэффекта и механической нагрузки [4—6]. Пьезопреобразо-ватель нано- и микроперемещений работает на основе обратного пьезоэффекта, в котором эффект перемещения достигается за счет деформации пьезопреобразователя при приложении внешнего электрического напряжения.
Рассмотрим механические и регулировочные характеристики простых и многослойных пьезопреобразователей. В классическом электроприводе статические характеристики электродвигателя в установившихся режимах работы делятся на механические ю(М) и регулировочные ro(U), где ю — угловая скорость вращения вала, M — момент нагрузки, U — управляющее напряжение. Аналогично для пьезопреобразователей, используемых для нано- и микроперемещений, статические характеристики вида S(a) или Al(F) будем называть механическими характеристиками, где S — относительная деформация, а — механическое напряжение, А/ — относительное перемещение торца пьезопреобразователя в статике, F — внешняя сила, а вида S(E) или Al(U) — регулировочными характеристиками пьезопреобразователя, где E — напряженность электрического поля.
Измерения механических и регулировочных характеристик пьезопреобразователя производились на прессе марки УММ-5 в диапазоне рабочих нагрузок при механических напряжениях в пьезопреобразователе до 50 МПа.
Рассмотрим простой пьезопреобразователь (пьезопластину) (фиг. 1, а). Статическая механическая характеристика пьезопреобразователя — уравнение обратного пьезоэффекта [2—6] при продольном пьезоэффекте и управлении по напряжению
S3 = d33E3 + ¡e3g3 (2.1)
где S3 = Al/5 — относительная деформация пьезопреобразователя по оси 3; А/ — относительное перемещение; 5 — толщина простого пьезопреобразователя; d33 — пьезомо-дуль; E3 = U/ 8 — напряженность электрического поля в пьезопреобразователе по
оси 3; U — напряжение на электродах пьезопреобразователя; sE = 1/ E33u — упругая податливость по оси 3 при E = const и управлении от источника напряжения; E33u — модуль Юнга пьезоэлектрической керамики при E = const; с3 = - F/A0 — механическое напряжение в пьезопреобразователе по оси 3; F — внешняя сила; Д0 — площадь сече-
ния пьезопреобразователя. Следовательно, из (2.1) в статике максимальное перемещение по оси 3 простого пьезопреобразователя A/3max при F = 0 получаем в виде
A?3max = d^U (2.2)
Соответственно, максимальное рабочее усилие по оси 3 простого пьезопреобразовате-ля F3max при А / = 0 определяется выражением
77 _ 3imi x
F3max e E V^--3/
S338 S338
Для простого пьезопреобразователя (пьезопластины) при продольном пьезоэффек-те (фиг. 1, а) с пьезомодулем d33 = 4 • 10-10 м/В, напряжением питания U = 300 B, толщиной пьезопластины 8 = 0.6 • 10-3 м, упругой податливостью s^ = 1.25 • 10-11 м2/Н, радиусом R = 7.5 • 10-3 м, площадью сечения = 1.77 • 10-4 м2 получаем максимальное перемещение A/3max = 120 нм, максимальное рабочее усилие F3max = 2.83 • 103 H и статическую механическую характеристику вида S3(a3) на фиг. 2, а, где с3 [МПа] — механическое напряжение по оси 3. при E3 = 600,400,200 кВ/м (соответствующие зависимости обозначены 1, 2, 3).
Из (2.1) получаем уравнение статической механической характеристики простого пьезопреобразователя при продольном пьезоэффекте с управлением по напряжению
А/ = d33U - sE3Fб/A0 = d33U - F/C33 (2.4)
или
Ы = Ы 3max (1 - F/F3max) (2.5)
где C33 = AqI(se3$) — жесткость простого пьезопреобразователя с управлением по напряжению при продольном пьезоэффекте. Соответственно, при U = const получаем уравнение A/(F) механической характеристики, при F = const имеем уравнение A/(U) регулировочной характеристики пьезопреобразователя. Статическая механическая характеристика пьезопреобразователя имеет вид уравнения обратного пьезоэффекта [2—6] при поперечном пьезоэффекте с управлением по напряжению
S = d31E3 + s^ai (2.6)
Для нахождения в статике максимального перемещения по оси 1 простого пьезо-преобразователя A/1max при F = 0 воспользуемся уравнением (2.6)
A/lmax = d3iUVS (2.7)
Соответственно, максимальное рабочее усилие по оси 1 простого пьезопреобразовате-ля F1max при А / = 0 найдем из выражения
Fimax = d31UAc/(s115) (2.8)
Рассмотрим простой пьезопреобразователь при поперечном пьезоэффекте (фиг. 1, b) (напряженность электрического поля направлена по оси 3, а деформация — по оси 1) с пьезомодулем d31 = 2 • 10-10 м, напряжением питания U = 300 B, толщиной пьезопластины
8 = 0.6 • 10-3 м, упругой податливостью ^ = 1.15 • 10-11 м2/Н, высотой h = 3 • 10-2 м, шириной b = 1 • 10-2 м; площадью сечения = 6 • 10-6 м. Получим механическую характеристику пьезопреобразователя (фиг. 2, b) с учетом обозначений F [H] и А/ [мкм], где
А/
3 - ось
Р ^ \Е3
р\ \ез
(а) Р\ \е3
р\ \Е3
/ С33 - Р\ \е3
р\
Р\ \Е3
Р\ \е3
г 8 р\ \е3
и
А/
| 1
Для дальнейшего прочтения статьи необходимо приобрести полный текст. Статьи высылаются в формате PDF на указанную при оплате почту. Время доставки составляет менее 10 минут. Стоимость одной статьи — 150 рублей.