ПРОБЛЕМЫ МАШИНОСТРОЕНИЯ И НАДЕЖНОСТИ МАШИН
№ 4,2009
УДК 629.017:531.391.5
© 2009 г. Черных В.В., Статников Р.Б., Храпов Д.С., Макеев О.М.
МЕТОД ИССЛЕДОВАНИЯ ПРОСТРАНСТВА ПАРАМЕТРОВ В ЗАДАЧАХ ПРОЕКТИРОВАНИЯ ЛЕГКОВЫХ АВТОМОБИЛЕЙ
Метод Исследования Пространства Параметров получил широкое применение в задачах проектирования технических систем, которые являются задачами со многими ограничениями и минимизируемыми или максимизируемыми критериями. Рассматривается применение этого метода в четырех задачах, которые возникали в процессе проектирования легковых автомобилей в ОАО "АВТОВАЗ". Дается описание моделей расчета, методов вычисления значений функций и критериев, а также неформальная постановка задач многокритериальной оптимизации.
Существует много оптимизационных процедур, которые применяются в инженерных задачах. Выделим генетические методы, алгоритмы стохастической аппроксимации, которые получили наибольшее распространение. Однако их применение предполагает, что специалист может корректно поставить задачу оптимизации и определить допустимое множество решений — множество ограничений на параметры, критерии и функциональные зависимости. К сожалению, это не так. В итоге решаются некорректно поставленные задачи. Дело в том, что многие критерии противоречивы и определить ограничения на них представляет большие, а порой непреодолимые трудности для специалистов. Добавим, что многие ограничения на функциональные зависимости и параметры могут корректироваться. Успех решения оптимизационных задач во многом зависит от корректного определения допустимого множества решений. Неправильное или неполное его определение приводит к тому, что методы оптимизации ищут оптимальные решения не там, где это нужно. В худшем случае это множество оказывается пустым. Одно из главных назначений метода Исследований Пространства Параметров (метод ИПП) [1—3], который получил широкое применение в различных сферах человеческой деятельности, состоит в том, что с его помощью строится множество допустимых решений. Метод ИПП реализован в виде программного комплекса MOVI (Multicriteria Optimization and Vector Identification) в Институте машиноведения Российской Академии наук [3].
Вопросы поиска оптимальных решений при проектировании и доводке автомобилей на основе метода ИПП рассматривались в работах В.Б. Бетелина и А.И. Ставицко-го (рама автомобиля), Ю.С. Павлова (картер заднего моста), Л.В. Корчемного и Л.Н. Синельникова (механизм газораспределения), А.Е. Плетнева (доводка автомобиля), М.Д. Перминова (уменьшение шума в автомобиле); в работах С.В. Бахмутова, С.В. Богомолова и Р.Б. Висича обсуждались вопросы оптимизации по критериям управляемости и устойчивости автомобиля [1].
На базе MOVI в ОАО "АВТОВАЗ" разработаны комплексы программ, предназначенные для решения задач проектирования узлов легковых автомобилей. В настоящей статье в "многокритериальном ракурсе" рассматриваются четыре задачи: многокритериальная оптимизация кинематической схемы трансмиссии полноприводного легкового автомобиля; расчет и оптимизация кинематических характеристик механизмов
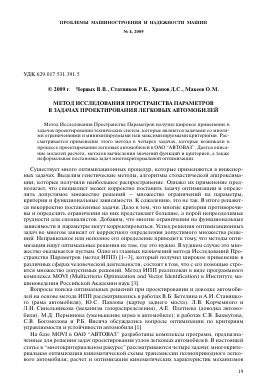
Рис. 1
независимых подвесок колес; выбор допустимого расположения сидений, педалей, панелей приборов, пола и связанных с ними посадку водителя и пассажиров в салоне; оптимизация параметров плавности хода автомобиля. Пользуемся терминологией и обозначениями варьируемых параметров, критериев и функциональных зависимостей, принятых в работах [1—3].
Оптимизация кинематической схемы трансмиссии полноприводного легкового автомобиля. Известно, что полноприводным автомобилем называется автомобиль, у которого крутящий момент от двигателя передается одновременно к передним и задним колесам при помощи устройства, называемого трансмиссией. На рис. 1 показана схема кинематической цепи [4], моделирующей одну из трансмиссий. Звено AMN моделирует двигатель, MN — коленчатый вал двигателя; звенья KCD и HLG — редукторы переднего и заднего мостов. Двигатель и редукторы в процессе проектирования могут быть повернуты на углы у, ю и в вокруг прямых, неподвижных относительно прямоугольной системы координат Oxyz и параллельных координатной оси Oy. Звенья DE и FG — передний и задний карданные валы. Раздаточная коробка моделируется треугольником — звеном EPF, а промежуточный вал — звеном NP. Звено NP образует сферическую пару N со звеном AMN и пару шар—цилиндр с EPF. Сферическими парами являются пары D, E, Fи G. На рис. 1 показаны также n, p, d, e, f, g — углы между векторами MN и NP, NP и EF, CD и DE, DE и EF, EF и FG, FG и GL.
Из формулы Сомова—Малышева [4] следует, что кинематическая цепь (рис. 1) имеет 7 степеней свободы. В качестве степеней свободы (обобщенных координат механизма) естественно взять величины ю, у, nxy, nxz, pxy, pxz, в, где nxy, nxz и pxy, pz — проекции углов n и p на координатные плоскости Oxy и Oxz. Изменяя значения этих величин, конструктор получает приемлемую трансмиссию. Длина np = |NP| при этом может меняться.
Качество трансмиссии оценивается углами d, e, f, g и величинами Rde = J\d2 — e2 и
Rfg = V/ — g \ . Чем они меньше, тем более износостойки и долговечнее шарниры, а также меньше неравномерность передачи крутящего момента и выше коэффициент полезного действия трансмиссии. Компоновочные соображения требуют ограничений на координаты точек M(xM, yM, zM), N(xN, yN, zN), E(xE, yE, zE) и т.д., а конструктивные — на длину np, углы n, p и т.д. Значения углов и координат, определяющих качество и ограничения, зависят от значений обобщенных координат. Не будем приводить соответствующие алгоритмы, а отметим, что расчет сводится к решению алгебраического уравнения четвертой степени.
Из изложенного следует, что проектирование трансмиссии приводит к задаче многокритериальной оптимизации, где в качестве варьируемых параметров а могут вы-
в 0 7Г
Рис. 2
ступать ю, у, пху, пхг, рху, рхг, в, в качестве критериев Ф — й, е,/, Лйе, / а функциональных зависимостей/ — хм, ум, гм, хя, Уя, N пр, п и т.д. Такая задача решалась в [5], где варьируемыми параметрами являлись ю, у, пху, пхг, в, а проекции рху и ругла р брали постоянными. Прототип (первоначальный вариант трансмиссии) удалось улучшить по критериям й и Яйе более чем в два и четыре раза соответственно.
Расчет и оптимизация кинематических характеристик механизмов независимых подвесок колес. Подвески колес, как устройства, обеспечивающие связь колес с кузовом автомобиля, называются независимыми, если их перемещения не оказывают влияния друг на друга. Механизмы, моделирующие эти подвески, являются пространственными с одной или двумя степенями свободы [6—8].
Рассмотрим подвеску "Макферсон". На рис. 2 дано схематизированное изображение механизма этой подвески, описание которой подробно описано в [8], и определены основные кинематические характеристики: схождение е, развал а, изменение базы Ах и изменение колеи Ау, которые являются функциями от хода колеса А, (АшЬ < А < Атах).
Значения кинематических характеристик влияют на управляемость и устойчивость автомобиля. По этой причине в процессе проектирования подвески стремятся обеспечить ограничения на эти характеристики или их оптимизировать. Устройство шарниров требует наложения конструктивных ограничений, например ограничений на углы между векторами L2L1 и L1K, L1K и KM. Должны быть выполнены компоновочные ограничения: колесо при повороте не должно упираться в кузов или должно занимать по возможности минимальное пространство. Приемлемый механизм подвески конструктор получает путем изменения координат базовых точек: С$(хсз, усз, гсх), Fsl(xFSl, УFS1, ZFsl), в&вз, Увs, ва(хво, Уво, *во), Щ(хщ, уцг, гЩ), П(хв, ув, 1В) и т.д. Имея координаты базовых точек, моделируя колесо путем вращения некоторой плоской ломаной вокруг оси MSNS и задавая кузов произвольной пространственной ломаной, можно рассчитать все кинематические характеристики и определить выполнение всех конструктивных и компоновочных ограничений. Не будем останавливаться на соответствующих алгоритмах. Отметим лишь, что вычисление кинематических характеристик основывается на решении системы трех алгебраических уравнений с тремя неизвестными [6, 7].
Из изложенного следует, что проектирование подвески приводит к задаче многокритериальной оптимизации. В этой задаче в качестве варьируемых параметров а могут выступать координаты хС5, ус^ х^, у^, и т.д., в качестве критериев Ф — кинематические характеристики механизма подвески, а функциональных зависимостей / — кинематические характеристики и зависимости, определяющие выполнение конструктивных и компоновочных ограничений.
Е
s
Рис. 3
Посадка водителя и пассажиров в салоне; выбор допустимого расположения сидений, педалей, панели приборов и пола. От того, насколько удачно в салоне автомобиля выбраны расположения сидений, панели приборов, педалей и форма пола во многом зависят потребительские свойства автомобиля, например обзорность с места водителя, досягаемость до приборов управления, комфорт во время езды. Все эти процессы решаются на самых ранних этапах проектирования, когда салон и посадку водителя и пассажиров рассматривают в продольной плоскости симметрии кузова. Посадку моделируем при помощи плоских механизмов, плоских многоугольников, ломаных, окружностей и дуг. Плоскими механизмами с одной степенью свободы (угол поворота педали вокруг точки, неподвижной относительно кузова) являются все три педали — педали акселератора, сцепления и тормоза. Плоскими механизмами с двумя степенями свободы (угловое и поступательное регулирование сиденья) являются сиденья для водителя и пассажиров. Пол салона автомобиля и панель приборов перед водителем или пассажиром на переднем сиденье, а также сиденье перед пассажиром на заднем — ломаные специального вида. Голова, позвоночник, бедро, голень, стопа, башмак ноги водителя и пассажира — ломаные и окружности.
Рассмотрим постановку наиболее простой задачи — выбор приемлемой посадки пассажира на заднем сиденье, считая, что сиденье не регулируемое. На рис. 3 ломаная A1A2, ..., AjAj +An-1Ап — пол и сиденье перед пассажиром. Ломаная не является самопересекающейся и задается
Для дальнейшего прочтения статьи необходимо приобрести полный текст. Статьи высылаются в формате PDF на указанную при оплате почту. Время доставки составляет менее 10 минут. Стоимость одной статьи — 150 рублей.