МЕХАНИКА ТВЕРДОГО ТЕЛА № 1 • 2015
УДК 624.07.534.1
© 2015 г. И. И. ИВАНЧЕНКО
МЕТОД РАСЧЕТА МОСТОВЫХ СООРУЖЕНИЙ НА СЕЙСМИЧЕСКИЕ ВОЗДЕЙСТВИЯ
Изучение действия сейсмических нагрузок на мосты и эстакады относится к актуальным задачам динамики сооружений. Эти исследования объединяют два независимо развиваемых направления, которые включают расчет транспортных сооружений только на сейсмические воздействия [1— 14] и расчет сооружений на действие инерционной подвижной нагрузки [15—28]. В настоящей статье предлагается численный метод исследования колебаний стержневых систем, моделирующих мосты на действие сейсмических нагрузок при наличии подвижной нагрузки на сооружениях. На первом этапе рассматривается метод расчета строительного сооружения, только на сейсмические воздействия, задаваемые акселерограммами, при использовании стержневых граничных элементов (ГЭ). Второй этап исследования включает разработку методики по оценке взаимодействия при сейсмическом воздействии пролетного строения моста и подвижной нагрузки в виде железнодорожного состава, въезжающего на мост.
Ключевые слова: Мосты, сейсмические воздействия, железнодорожные составы, граничные элементы, шаговые процедуры.
Введение. Исторически расчеты по определению напряженно-деформированного состояния сооружения при сейсмических воздействиях, развивались в основном по двум направлениям. Это прежде всего расчеты на основе спектрального метода [1—8]. В основу метода положены оценки максимально возможных динамических усилий при использовании спектра собственных частот и форм колебаний сооружения, определяемых в том числе при использовании метода конечных элементов (МКЭ), и нормативных итоговых вычислений максимально возможных (по каждой форме колебаний) значений интегралов Дюамеля для узловой инерционной нагрузки, задаваемой возможными и инструментально полученными акселерограммами, при учете, через наборы коэффициентов, многих попутных факторов, характеризующих: сейсмичность района, вид конструкций и других характеристик [14]. В итоге, так как максимальные усилия в элементах сооружения, соответствующие различным формам колебаний, реализуются в различные моменты времени, расчетные усилия в сечениях сооружения вычисляются по формуле среднеквадратичного осреднения [14]. Другое, дополнительное направление, это применение динамического метода расчета сооружений на сейсмические воздействия, включающее серии числовых экспериментов при математическом моделировании (на основе МКЭ или МГЭ) сооружения и получении результатов (динамических усилий и смещений) в зависимости от временной составляющей, при непосредственном использовании аселерограмм предшествующих землетрясений. Динамическая теория сейсмического расчета сооружений (второе направление) представлено, включая мостовые конструкции, в [1, 5, 9—13 и др.]. Так, в работах [5, 9, 10 и др.] рассмотрены вопросы определения напряженно деформированного состояния стержневых систем при использовании традиционных КЭ и гра-
ничных стержневых элементов. Можно отметить ряд работ [6, 7, 9, 10 и др.], связанных с мостами при действии на них только сейсмических воздействий. Представляет особый интерес отметить работы, где исследуется одновременное действие на мост как подвижной, так и сейсмической нагрузок, задаваемых аселерограммами. Так, в [11] рассмотрено вертикальное сейсмическое воздействие на опоры однопролетного стального висячего моста при движении по нему системы сосредоточенных сил. Для решения задачи в [11] используются тригонометрические ряды. В [12] при решении задачи применяется конечноэлементная дискретизация железнодорожных структур, в виде железнодорожного полотна как вне, так и на многопролетной эстакаде для высокоскоростного движения поездов при одновременном действии боковой сейсмической нагрузки и движущегося протяженного железнодорожного состава, состоящего из связанных между собой вагонов, моделируемых каждый системой с 31 степенями свободы. Рассмотрены специальные виброизолирующие системы и нелинейные упруго-вязкие элементы, регулирующие вибрации пути в вертикальном и горизонтальном, поперечном для оси эстакады, направлениях. В работе [13] продолжены исследования [12] и рассмотрена задача по конструированию элементов безопасности в виде защитных барьеров вдоль пути при сходе скоростного состава с рельсового пути в процессе боковых сейсмических воздействиях.
В основу предлагаемой методики, которая позволяет оценить динамические усилия в системе "состав—мост" при сейсмическом воздействии на мост, положены результаты предыдущих исследований по неустановившейся динамике стержневых и комбинированных систем [19, 23—26]. Использование граничных стержневых элементов и шаговой процедуры, предложенных в работах [19, 23], позволяют, решая динамическую задачу, существенно сокращать порядок разрешающих систем уравнений, описывающих движение сооружения (по сравнению с использованием традиционных КЭ), сохраняя возможность определения полей динамических усилий и смещений при использовании высокой степени пространственной дискретизации сооружения и смешанного метода строительной механики, положенного в основу указанного подхода к решению задачи. Так, в [19] рассмотрен метод расчета стержневых систем на силовые неустановившиеся воздействия, в [23, 25] предложен метод расчета стержневых и коробчатых систем на подвижную инерционную нагрузку. В настоящей статье методика из [19, 23—25] расширена на случай сейсмических воздействий, задаваемых акселерограммами, на сооружения, моделируемые стержневыми системами. Рассматривается методика на конкретных примерах, не ограничивающих возможности подхода к решению проблемных задач, включая случай, когда сейсмическому воздействию подвергнута мостовая ферма без подвижной нагрузки и в момент её появления на ферме.
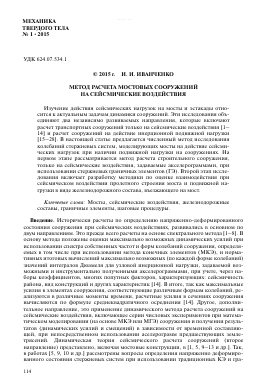
1. Пространственная дискретизация мостовой фермы. Мостовое пролетное строение (железнодорожная ферма пролетом 110 м, проект № 3 501-31/75 (фиг. 1, a, Ь)) рассматривается как пространственная стержневая система с распределенными параметрами. Применяется метод декомпозиции для системы "мост—подвижная нагрузка" при рассмотрении в качестве последней железнодорожного состава.
Сохраняя обозначения, введенные в предыдущих исследованиях, введем пространственную дискретизацию мостовой фермы. Будем проводить нумерацию узлов системы, заканчивая общую нумерацию, узлами элементов проезжей части (продольных балок фермы). Расчленим стержневую систему, считая, что она состоит из т стержней большой длины и имеет п узлов. Для изучения колебаний стержневой систем применим, как и в [19, 23—26], теорию сложного движения для элементов стержневой системы. Введем правую глобальную систему координат OXYZ. Введем для каждого стержня правые местные системы координат о^ = 1, ..., т ). Ось ук направим от узла с
(а)
Фиг. 1
порядковым номером I к узлу с номером к, при I < к. После декомпозиции стержневой системы по узлам, выделим из несущей конструкции подсистему {е*} (к = 1,..., т*), состоящую из т* элементов проезжей части, и подсистему {ек} (к = 1,..., т), состоящую из т = т - т * элементов, не подверженных действию подвижной нагрузки. В итоге имеем систему {ек, е*}.
Введем для каждого стержня правые подвижные системы координат о1кх1ку1к11к . Начало подвижной системы координат о1к свяжем с узлом I , а плоскость о1кх1ку1к11к кру-тильно с сечением в узле I . Ось у1к в каждый момент времени будем считать проходящей через узел к. Будем обозначать через NN число дифференциальных уравнений в частных производных, описывающих относительное движение стержневых элементов ек и е*. Введем для системы {ек, е*} поле узловых абсолютных, переносных и относительных линейных и угловых смещений, поле узловых усилий и моментов в концевых сечениях элементов. Рассмотрим следующие столбцы смещений и усилий с компонентами в местных системах координат, отнесенных к элементам ек и е*:
Чк = [Чк¿1', Чк = [ЧйЛгк]', Чк = [Ч«Г,Чкк]' — векторы линейных и угловых перемещений
Фиг. 2
узлов I и к в абсолютном, относительном и переносном движениях; Чг = [Ч/-,..,Ч?,..,Ч™]', Ч е = [Че,.,Ч «,..,Ч Г]' — векторы относительных и переносных обобщен-
ч ек гск сНу • г к г к к Ь-«
ных перемещении; I = 1,1к] — вектор усилии и моментов в узлах I и к; р = [р1 ,.,рп,.,рб ] (п = 1, ..., 6) — вектор распределенных внешних сил и моментов, действующих на {ек,е*}; I = I:,..,Гк',..,!т]' — вектор узловых усилий для {ек,е*}; Ч = [ч1,..,.,чЬ,..,ч™]' — вектор узловых смещений для {ек, е*}; ЧЬ = [¿к ] = [¿я,..,^,..,?;^ ]' — вектор относительных перемещений любой точки ек и е*.
Рассмотрим векторы — столбцы с компонентами в основной системе координат при нумерации узлов П = 1, .., п; ч = [Ч1,..,Ч],..,Ч„] — вектор узловых перемещений; Ч 5 = [Ч л,.., Ч 5у,..,Ч — вектор заданных узловых перемещений [34]. Будем полагать
к к к к к к ек ек Ч,г, Чк, Чй, Чгк, ЧеЬ Чек, Чу, ч , 1к, Ч5у векторами с шестью составляющими, например
Ч ь = [¿¡1,-, 41П,, ¿¡б] , ^ = [/¡1,--, /¿Я,; /¿б ]'. Как и в [19, 23Ь первые тРи компоненты в порядке возрастания п означают величины узловых смещений или, соответственно, узловых сил, направленных вдоль осей хкпп1к , аналогично и в основной системе координат, следующие три компоненты — величины углов поворота узлов или, соответственно, узловых моментов относительно этих или параллельных осей. Модель железнодорожного пути под каждым колесом представим (фиг. 2) в виде вертикальных и горизонтальных упруго-вязких связей [17, 23, 27, 29], обозначая эти связи как
систему элементов ("колесо—рельс") {ек }, к = 1, ..., N, где N = 16 для выбранной модели вагона.
Считая, что в момент времени ? на е* находится ^ колес, рассмотрим чок = [¿о], Р\ = [Рк ], Ик = [Я^] (к = 1,...,2 ■ N4) — векторы столбцы, соответственно, вертикальных и горизонтальных смещений движущихся узлов для е* (точек контакта ек и е*), статических давлений, вертикальных динамических добавок для колесных пар и горизонтальных реакций движущихся колес, находящихся на е*. Обозначим через
Ч0 = [(\к] и И = [Ик] — векторы вертикальных и горизонтальных смещений движущихся узлов системы
Для дальнейшего прочтения статьи необходимо приобрести полный текст. Статьи высылаются в формате PDF на указанную при оплате почту. Время доставки составляет менее 10 минут. Стоимость одной статьи — 150 рублей.