621.396.99
Методика мониторинга глобальной навигационной спутниковой системы ГЛОНАСС с помощью системы дифференциальной
коррекции и мониторинга
В. В. ДВОРКИН, С. Н. КАРУТИН, В. В. КУРШИН
ОАО «Российские космические системы», Москва, Россия, e-mail: sergey.karutin@rniikp.ru
Представлена методология мониторинга параметров и оценки целостности радионавигационных полей глобальной навигационной спутниковой системы ГЛОНАСС, реализованная в системе дифференциальной коррекции и мониторинга, результаты работы которой позволяют сделать выводы о направлениях дальнейшего совершенствования функциональных дополнений.
Ключевые слова: ГЛОНАСС, система дифференциальной коррекции и мониторинга.
The global navigation satellite system GLONASS parameters monitoring and radio navigation fields integrity estimation methodology implemented in the differential correction and monitoring system is described. The differential correction and monitoring system operation results allowing to make conclusions on functional augmentations further improvement are presented.
Key words: GLONASS, differential correction and monitoring system.
За последние девять лет в различных регионах земного шара в эксплуатацию последовательно вводятся системы функциональных дополнений космического базирования (satellite-based augmentation system SBAS) глобальных навигационных спутниковых систем (ГНСС). В США развернута Wide-area augmentation system (WAAS), в Японии потребители используют MTSAT-based satellite augmentation system (MSAS), в завершающую фазу вступила процедура сертификации European geostationary navigation overlay service (EGNOS) — системы, предназначенной для обслуживания европейских потребителей. По заказу Индийского правительства ведутся работы по созданию системы GPS Aided geo augmented navigation (GAGAN). Заинтересованность в развитии подобных систем выражают страны Африки, Ближнего Востока и Латинской Америки. В завершающую фазу входят работы по созданию системы дифференциальной коррекции и мониторинга (СДКМ) — российской системы SBAS [1].
В отличие от зарубежных аналогов СДКМ является первой в мире системой SBAS для обеспечения корректирующей информацией и данными о целостности ГЛОНАСС и GPS. Решение данной научно-практической задачи потребовало разработки методологии контроля параметров и мониторинга целостности радионавигационных полей, создаваемых навигационными космическими аппаратами (НКА) в составе ГЛОНАСС.
Методика мониторинга характеристик ГЛОНАСС. Цель такого мониторинга, осуществляемого СДКМ, — это выявление ситуаций нештатного функционирования системы и своевременное информирование о них пользователей.
При проведении мониторинга состояния радионавигационного поля ГЛОНАСС решают две основные задачи:
мониторинг в реальном времени;
апостериорный мониторинг, позволяющий подробно проанализировать поведение характеристик системы с выяснением причин отклонений параметров радионавигационного поля от заданных тактико-технических характеристик.
Мониторинг и оценку параметров радионавигационного поля проводят в два этапа:
проверка эфемерид;
проверка погрешности измерения первичного навигационного параметра радиосигнала НКА за счет космического комплекса (погрешность эфемеридно-временной информации).
Проверку эфемерид НКА осуществляют в реальном времени и путем апостериорной обработки сравнением координат НКА ГЛОНАСС, рассчитанных с использованием бортовых эфемерид, с опорными эфемеридами, полученными на основе прогноза уточненных эфемерид, определенных в центре СДКМ.
В качестве тестовых статистик используют погрешности определения координат НКА по радиусу 8Г, вдоль орбиты 81 и по бинормали 8П, а также эквивалентную погрешность измерения псевдодальности S по уровню вероятности 0,95:
о5 = ^8 2 + 0,0204 (§2 + 82).
Кроме того, оцениваются статистические характеристики (математическое ожидание т, среднее квадратическое
отклонение (СКО) о-, медиана med,) погрешности вектора бортовых эфемерид по каждой координате на исследуемом временном интервале [t1, ..., tN]:
mi = N X (Xij - Xij(1) j=1
I ' 2
О = JN-1 ^fo - m) ; (2)
med,- = median\Xj - Х„\, (3)
j = 1,..., N
где i — параметр вектора эфемерид; N — количество измерений на интервале времени.
Полученные тестовые статистики сравнивают с априори заданными пороговыми значениями, которые определены требованиями потребителей [2].
Проверка погрешности первичного измерения навигационного параметра НКА за счет космического комплекса. Оценку этой погрешности осуществляют на основе моделей первичных измерений псевдодальности S и псевдофазы Ф несущих колебаний радиосигнала, формируемого станцией сбора измерений (ССИ) в составе СДКМ [3]:
SL1,2 = R + 8R + c(Sf + 87") + §ион + 8троП + 8аП; (4)
= R + 8R + c(8t + 8T) + A,L1,2NL1,2 -
ной рефракциями, позволяет оценить погрешность 8КК измерения псевдодальности за счет космического комплекса по выражению
SKK = SR + cST « S¡ - R - cSt - §ион - §троп- (5)
Поскольку ССИ в составе СДКМ осуществляют прием и измерение первичных навигационных параметров радиосигналов НКА в диапазонах частот L1 и L2, ионосферную задержку можно оценить как [4]:
¿ион L1 = (fL2/(fL2 - fLl)>L1 - SL2); (6)
¿ион L2 = Т8ион L1, (7)
где fL1, fL2 — частоты несущих колебаний радиосигналов НКА в этих диапазонах; у = (fL1/fL2)2 — нормирующий коэффи-ц иен т.
Тропосферную задержку 8троп оценивают в соответствии с методикой, детально описанной в [2].
Расхождение Sí между шкалами времени потребителя и используемой навигационной системы определяют с применением всего массива измерений первичных навигационных параметров, сформированных данной ССИ. В момент
времени n оценку Stn можно получить методом наименьших квадратов [4]:
Sin = Sin-1 + (Kn-1 + НП W-1 Hn )-1 НП W-1 Yn; (8)
■ 8ион + STPon + еФ;
Kn-1 - НП-1 W--1 Hn-1>
R - j(*HKA - *)2 + (YHKA - y)2 + (ZHKA - z)2 .
Здесь R — геометрическая дальность от НКА с координатами (-^Нка' УНКА, ^НКА) до ССИ с координатами (х, у, г); 8R — погрешность эфемеридной информации; с — скорость света; 8? — расхождение между шкалами времени ССИ и используемой навигационной системы; 8Т — расхождение между шкалами времени НКА и его системы, или погрешность частотно-временных поправок; 8ион, 8троп — задержки распространения сигнала НКА в ионо- и тропосферах; 8ап — аппаратурная погрешность измерений псевдодальности; %1Л 2 — длина волны несущих колебаний сигнала НКА; И, L2 — частотные диапазоны; 2 — целочисленная неоднозначность измерения фазы; еф — аппаратурная погрешность измерения псевдофазы.
Первичные измерения псевдодальности осуществляют с помощью специализированных аппаратно-программных средств ССИ, обеспечивающих аппаратурную погрешность измерения псевдодальности на уровне 0,1 м (СКО) при обработке на интервале 30 с, поэтому компенсация погрешностей измерений, обусловленных ионосферной и тропосфер-
где Н — матрица-столбец коэффициентов в модели (4); К — дисперсия оценки 8?п; №— ковариационная матрица первичных измерений; У — вектор невязок измеренных и расчетных значений псевдодальностей, полученный в соответ-
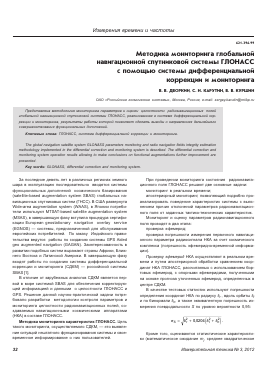
Рис. 1. Временная зависимость погрешности измерения псевдодальности за счет космического комплекса
ствии с (4) с учетом компенсации погрешностей трассы распространения по данным бортовой эфемеридно-временной информации.
При нахождении вектора невязок У используют дополнительную информацию — приращения измерений псевдофазы (1) несущих колебаний радиосигналов НКА. При учете результатов измерений, полученных в течение N последовательных моментов времени, можно уменьшить погрешность оценки псевдодальности путем сглаживания
Sn = а
п -1
5п + Е $ +Х (Ф,-+1 -Ф,-) ,' = п - N
где а = 1IN — весовая функция.
Параметры ковариационной матрицы первичных измерений — ее диагональные элементы — определяются на основе априорной информации, включающей данные фактора точности, передаваемого в составе цифровой информации, длительности сглаживания измерений и т. д.
Полученные согласно (6) — (8) оценки 8tn, 8И0Н и 8троп
позволяют по (5) оценить погрешности 8КК измерения псевдодальности за счет космического комплекса для каждой ССИ в составе СДКМ.
Аналогично процедуре проверки эфемерид (1) — (3) на заключительном этапе необходимо найти параметры выборки оценок погрешности псевдодальности по всей сети ССИ по всем НКА:
тПк =
- м
1 Е8кк м Е" п ' 1=1
оп =
Е (8кк - т кк м -1 Е 8 п] тп
(9)
medПк = median - т™ :
1=1,..., м
где М — общее количество измерений по всей совокупности НКА по всем ССИ в составе СДКМ, которые формируют измерения навигационных параметров.
Рис. 2. География размещения станций сбора измерения СДКМ на территории Российской Федерации (а) и за рубежом (б)
Рис. 3. Погрешность определения плановых координат (с вероятностью 0,95) при использовании корректирующей информации СДКМ
(февраль 2011 г)
В настоящее время в качестве критерия оценки качества навигационного обеспечения используется оценка диспер-
кк
сии измерения псевдодальности о™. Предельно допусти-кк
мые значения оКк определены тактико-техническими требованиями на глобальную навигационную систему ГЛОНАСС, которые предусматривают поэтапное повышение качества навигационного обеспечения с достижением значения 0,7 м (СКО) в конце 2011 г. Результаты мониторинга радиосигналов НКА ГЛОНАСС показывают, что работы по повышению качества навигационного обеспечения позволили к середине 2011 г. получить погрешность измерения псевдодальности 8КК = 1,4 м (рис. 1).
Контроль целостности ГЛОНАССЮРБ/СДКМ. Обеспечение целостности является сложной задачей, которая определяется работой наземных и космических средств СДКМ. Количественная мера оценки целостности — среднеквад-ратическая погрешность измерения псевдодальности до НКА за счет космического комплекса после применения быстрых и долговременных поправок, а также исключения атмосферных эффектов и аппаратурных погрешностей ССИ в предположении, что измерения подчиняются нормальному закону распределения. Эти среднеквадратические погрешности измерения дальности передаются в составе сообщений СДКМ и используются для расчета мод
Для дальнейшего прочтения статьи необходимо приобрести полный текст. Статьи высылаются в формате PDF на указанную при оплате почту. Время доставки составляет менее 10 минут. Стоимость одной статьи — 150 рублей.