МЕХАНИКА ТВЕРДОГО ТЕЛА № 1 • 2013
УДК 531.3
© 2013 г. П. К. ПЛОТНИКОВ
МОДЕЛЬ СИЛ ТРЕНИЯ И ДИНАМИКА КАЧЕНИЯ ШАРА ПО ШЕРОХОВАТОЙ ПОВЕРХНОСТИ С УЧЕТОМ ПРЕДВАРИТЕЛЬНОГО
СМЕЩЕНИЯ
Модель сил трения скольжения и верчения шара в виде конечных соотношений, полученных интегрированием касательных напряжений на контактной площадке, параметры которой определены по теории Герца для трибосопряжения шар — шероховатая горизонтальная поверхность, дополнена моделью моментов сил трения качения. Особенность дополненной модели состоит в учете эффекта предварительного смещения в моменте сил трения качения, а также в моменте сил верчения. Показано, что движения шара в зоне предварительного смещения носят квазилинейный характер и при ударных возмущениях представляют собой затухающие колебания по трем углам ориентации. Численные значения параметров модели трения качения и верчения определены для зон предварительных смещений экспериментальным путем, а параметры трения скольжения и частично верчения — расчетным образом. Математическое моделирование позволило проследить новые свойства шара, а именно его торможение при качении, возникновение затухающих колебаний при начале движения и остановках, параметры переходных процессов.
Ключевые слова: трение качения, предварительное смещение, верчение, скольжение, шар, характеристика, пара трибосопряжения, моделирование.
1. Введение. В данной работе в модели сил трения шара учитывается эффект предварительного смещения, открытый в 1899 г. Д.С. Стивенсом [1] и представляющий собой упругое смещение одного тела пары трибосопряжения по отношению к другому под действием внешней касательной силы. Оно исчезает вместе с устранением упомянутой силы. Согласно [2] предварительное смещение — сдвиг поверхностей, предшествующий переходу к скольжению. А.В. Верховским, Д.С. Ренкиным и другими построены экспериментальные характеристики смещение — сила. В [1, 3] и других трудах установлено, что прямая пропорциональность между сдвигающей силой и смещением имеет место лишь в начальной стадии смещения. По мере приближения к предельному значению смещения связь между этими величинами приобретает нелинейный характер, и смещения нарастают быстрее касательной силы. Были определены также характеристики смещения тел от указанных сил для зон предварительного смещения качения и верчения [1—6]. Типичные значения зон предварительных смещений (ЗПС) составляют в трении скольжения величины от долей до нескольких микрометров [1—3]; в трении качения — от сотых долей до 5—7 мкм [5], а в [4] — даже до 200 мкм.
В рассматриваемой задаче пара трибосопряжения шар — упругая шероховатая поверхность рассматривается как голономная система, так как зона его контакта с поверхностью не является точечной, а размеры пятна определяются по теории Герца [7—9].
В [7] определены нормальная деформация, размеры пятна контакта и касательные напряжения, взяты интегралы от них и выписаны в явном виде силы трения скольжения. Введен и представлен в виде конечного соотношения момент сил трения верчения (это сделано впервые). Точные формулы сил трения скольжения и момента сил трения верчения упрощены путем использования разложения Паде. При анализе процессов движения шара показано, что с момента исчезновения проскальзывания шара одновременно становятся равными нулю скорости скольжения и верчения, и дальнейшее движение представляет собой прямолинейное качение с постоянной скоростью [7]. Подобный характер движения шара свидетельствует об отсутствии в модели моментов сил трения качения. Учет сил трения качения приводит к затуханию движения, т.е. к торможению, что обеспечивает согласование теории с опытами.
2. Постановка задачи. В данной работе в уравнения движения шара с трением скольжения и верчения [7] введены дополнительные соотношения для моментов сил статического и динамического компонентов сил трения качения и аналогичных компонентов момента сил трения верчения, в которых учитывается эффект предварительного смещения (ЭПС) [10]. Числовые параметры моделей моментов сил трения качения и верчения определены экспериментальным путем и описаны в данной работе. Учет ЭПС в модели движения шара с трением качения является новым. Он объясняет явления возникновения затухающих колебаний шара при нанесении малых ударов, т.е. в ЗПС, характера перекатывания и верчения шара и повторных колебаний при остановках, что продемонстрировано путем математического моделирования. Приводятся результаты опытов с шаром, где этот эффект убедительно проявился. Его характеристики и параметры определены для трения качения и трения верчения.
3. Экспериментальные исследования. Ниже приведены графики переходных процессов по углу колебаний гладкого стального шара, радиуса Я = 7.5 • 10-2 м, массой т = 14.3 кг, наблюдавшихся в экспериментах при размещении его на шлифованной горизонтальной поверхности чугунной плиты после нанесения по нему ударов от маятника массой тм = 72.8 г с плечом Ьм = 1.77 • 10-1 м и начальных отклонениях от вертикали плеча подвеса на углы 9° = 10°; 30°; 60°. Импульсы ударов определялись из следующих соотношений:
1 = Т (тм£АЛп9) = тм^мС089^
Л Л
2 ..
тм^м 0 + Им0 + = 0
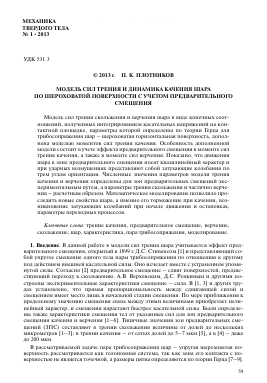
где им — коэффициент демпфирования в маятнике; g — ускорение силы тяжести. Съем сигнала производился видеокамерой на экране с координатной сеткой, на который отражался от шара луч лазерной линейки в режиме угломерной съемки. Графики переходных процессов для угловых колебаний шара изображены на фиг. 1 и свидетельствуют об изохронности характеристик трибосопряжения шар—плита.
Экспериментальная статическая характеристика шара, полученная в результате непосредственных измерений, для ЗПС аппроксимируется выражением
И, = -с ¡кг + с^к?, \к¡\ < АI, I = х, у (3.1)
где к, — угол поворота шара в зоне предварительного смещения вокруг горизонтальных осей (Оx) и (Оу) [7]; с,С — коэффициенты угловой жесткости линейного и нелинейного компонентов упругой характеристики трибосопряжения в ЗПС; И, — статический момент силы трения; А,- (г = х, у) — максимальные абсолютные значения ЗПС. Имеется нелинейный участок характеристики в зоне ее насыщения. На фиг. 2 изобра-
\ ■ 103 2.94
1.97
0
1.97 2.94
0 2 4 6 8 10 t
Фиг. 1
\ • 104 4.10
2.05
0
-2.05 -4.10
-16 -12 -8 -4 0 4 8 12 Фиг. 2
*<2
1
жена экспериментальная статическая характеристика зависимости угла предварительного смещения верчения X ; этого же шара от внешнего момента сил вращения М() вокруг вертикальной оси.
При увеличении вращающего момента от значения |Мг(?)| = 16 сН ■ см начинается невозвратное вращение шара в ту или иную сторону, т.е. кончается зона предварительного смещения. По углу она лежит в пределах от —1.4 до 1.4 угл. мин. Графики на фиг. 2 убедительно свидетельствуют, что для шара имеет место значительная по величине зона предварительного смещения верчения, которую в ряде задач следует учитывать. Осреднением графика 1 для экспериментов является прямая 2. Характеристика 1 на фиг. 2 соответствует некомпенсированному весу шара 26Н. Аппроксимацией статической характеристики с учетом нелинейного участка в зоне насыщения является формула
И1 =-0;Xг + сп{к3,г| <Лг (3.2)
где смысл констант и переменных такой же, как для формулы (3.1).
4. Математическая модель движения шара по шероховатой поверхности. Приведем вначале модель движения шара с трением скольжения и верчения из работ [7, 11], которая является базовой и необходима для последующего внесения дополнительных членов для моментов сил трения качения и математического моделирования процессов движения шара:
/юх = ; / юу = -ЛРХ; / ю 2 = МТ (4.1)
mx = Fx; my = Fy, и = ^ v2x + и
cos a = ux / u; sin a = uy / u; ux = x - Ra y; uy = y + Rax
2
Fx = —Fcosa; Fy = —Fsina; F =--—--
y 16e|wz| + 3п и
M _ 3nNfe2&z ; . ,
zT 16s|®z| + 15nU' ' " ' '
С учетом приведенных выше формул для моментов сил трения качения и верчения в зонах предварительного смещения ниже приведена модель В.Ф. Журавлева [7, 11] движения шара, дополненная соотношениями для моментов сил качения и верчения по второй физической модели трения с учетом эффекта предварительного смещения (ЭПС) [10]:
J(óx = RFy + MxT, J(óy = -RFx + MyT, Jéz = MzT + Mz(t), mx = Fx; my = Fy (4.2)
cos a= и x¡и; sin a = oy/u; и = и2 + v^ > 0
uy = y + R©x; ux = x - R©y
F _ 3nNfe2&z
16в|юг - юг1| + 3п М _ 3пЫ/г2 ( -юг1) ; . .
гТ 1бв|юг -®г1|+15пи; ' " 'У'2 Fx = —Fcosa; Гу = —йта; / = 2/5 тЯ2
/1(0,1 = -Мт +Ф;-; (о Х1 = ^ Х' Ю у1 = ^ у, Ю 21 = ^ 2 (4.3)
Мт = М^^п^д - щ) + М1„(1 - sign2(ю(1 - га,)) ' ■ = х,у (4.4)
М[ = 0.5Ф,(1 - sgn( |Ф,|-М]0)) + 0.5М]'°(1 + збп(|Ф(-|-М]°)^п Ф,, ■ = х, у
Ф,- = -е^ + еПХ3, I = х, у, г (4.5)
М? = ДТ!0М; М'к = ; > , 1 = х, у (4.6)
где //0;— статический и динамический безразмерные коэффициенты трения качения и верчения в моделях с учетом ЭПС; / — безразмерный коэффициент трения скольжения и верчения в модели Кулона; Я — радиус шара; /, т — момент инерции и масса шара; Г, Гх, Fy — полная сила трения скольжения и ее компоненты по горизон-
тальным осям Ох и Оу; u,ux,uy — полная скорость скольжения шара и ее компоненты по осям Ох и Оу; N — нормальная реакция плиты, равная по величине весу шара; rax, юу, raz — угловые скорости поворотов шара вокруг соответствующих осей; s — радиус пятна контакта шара по Герцу; MzT — момент сил трения верчения; Ф,- — момент упругих и диссипативных сил в ЗПС; юx1, юx2, юx] — угловая скорость "третьего" тела [10];
MxT, MyT — моменты сил трения качения; Mk , Ms° i = х, у — модули моментов динамических и статических сил трения качения, при этом Mf — моменты сил трогания; sgnX — смещенная к положительному порогу функция знака от некоторой переменной X; signX — общепринятая кососимметрическая функция знака с нулевым значением при X = 0. Соотношения в (4.2) являются дифференциальными уравнениями движения шара с моделью трения В.Ф. Журавлева. Они дополнены уравнениями и соотношениями (4.3)—(4.6) для моментов сил трения качения MxT, MyT с учетом ЭПС. В моменте сил верчения MzT учтен эффект предварительного смещения (ЭПС). Каждый из указанных моментов MiT в выражениях
Для дальнейшего прочтения статьи необходимо приобрести полный текст. Статьи высылаются в формате PDF на указанную при оплате почту. Время доставки составляет менее 10 минут. Стоимость одной статьи — 150 рублей.