ИЗВЕСТИЯ РАН. ТЕОРИЯ И СИСТЕМЫ УПРАВЛЕНИЯ, 2015, № 1, с. 156-170
РОБОТОТЕХНИКА
УДК 621.865
МОДЕЛИРОВАНИЕ ДВИЖЕНИЯ ТРЕХЗВЕННОГО РОБОТА С УПРАВЛЯЕМЫМИ СИЛАМИ ТРЕНИЯ ПО ГОРИЗОНТАЛЬНОЙ
ШЕРОХОВАТОЙ ПОВЕРХНОСТИ © 2015 г. Л. Ю. Ворочаева, Г. С. Наумов, С. Ф. Яцун
Курск, Юго-Западный государственный ун-т Поступила в редакцию 06.05.14 г., после доработки 15.09.14 г.
Рассматривается трехзвенный робот, перемещающийся за счет управляемых сил сухого трения, которые действуют на центральные точки контакта робота с шероховатой горизонтальной поверхностью. Разработана математическая модель механизма, представлены алгоритмы реализации различных типов движения, а также результаты численного моделирования и сравнение с аналитическими результатами.
Б01: 10.7868/80002338815010126
Введение. Исследования в области создания механизмов, имитирующих поведение реальных биологических прототипов, — новое, активно развивающееся направление. Копирование принципов поведения живых организмов позволяет создавать устройства, обладающие уникальными свойствами, которые находят конкретное практическое применение. Изучению движения мобильных многозвенных систем, описывающих движение так называемого "змееподобного" робота, посвящены работы [1—15].
При моделировании движения таких систем подразумевается, что они состоят из совокупности твердых тел с заданной массой, связанных между собой активными шарнирами, которые обеспечивают вращательное движение звеньев друг относительно друга. Также считается, что робот движется по шероховатой поверхности под действием сил трения, подчиняющихся закону Кулона. Подобный подход использован в [16—32].
Особенностью рассматриваемой в данной статье трехзвенной мобильной системы является то, что в зависимости от времени или параметров устройства силы трения, приложенные в точках контакта корпуса робота с горизонтальной шероховатой поверхностью, могут изменять свою величину в соответствии с принятым алгоритмом управления.
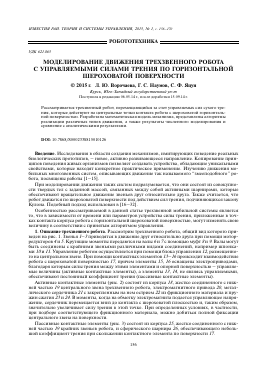
1. Описание трехзвенного робота. Рассмотрим трехзвенного робота, общий вид которого приведен на рис. 1. Звенья 1—3 приводятся в движение друг относительно друга при помощи мотор-редукторов 4 и 5. Крутящие моменты передаются на валы 6 и 7с помощью муфт 8 и 9. Валы могут быть соединены с крайними звеньями различными видами соединений, например шпонками 10и 11. Управление роботом осуществляется при помощи блока управления 12, размещенного на центральном звене. При помощи контактных элементов 13—16 происходит взаимодействие робота с шероховатой поверхностью 17, причем элементы 15, 16 оснащены электроприводами, благодаря которым силы трения между этими элементами и опорной поверхностью — управляемые величины (активные контактные элементы), а элементы 13, 14, не являясь управляемыми, обеспечивают постоянный коэффициент трения (пассивные контактные элементы).
Активные контактные элементы (рис. 2) состоят из корпуса 18, жестко соединенного с нижней частью 19 центрального звена трехзвенного робота, электромагнитного привода 20, металлического сердечника 21 с закрепленным на нем острием 22 из фрикционного материала и пружин сжатия 23 и 24. В моменты, когда на обмотку электромагнита подается управляющее напряжение, сердечник перемещается вниз до контакта с шероховатой плоскостью и, таким образом, значительно увеличивает силу трения в этой точке. При определенных условиях, в частности, при подборе соответствующего фрикционного материала, можно добиться полной фиксации центрального звена на поверхности.
Пассивные контактные элементы (рис. 3) состоят из корпуса 25, жестко соединенного с нижней частью 19 крайних звеньев робота, и сферического шарнира 26, обеспечивающего небольшой коэффициент трения при скольжении контактного элемента по поверхности 17.
8 4 6 12 5 9 7
//////// /// /у/ у / }/\/
13 1 11 16 2
Ж
/ /¡/V/ /\/ /
" — 14
15 10 3 17 Рис. 1. Общий вид трехзвенного робота
19 24 23
/ / //у /// у у / ^ л
21 22 20 17
Рис. 2. Активный контактный элемент
Рис. 3. Пассивный контактный элемент
При включении электромагнитного привода в активном опорном элементе центральное звено 2 робота при определенных условиях может приподниматься на некоторую величину за счет выдвижения иголок. Очевидно, что это приведет к тому, что сила прижатия пассивных элементов и, как следствие, сила трения ослабевают. Для устранения этого эффекта внешние звенья 1 и 3 робота снабжены дополнительными шарнирами (на схеме не показаны), позволяющими им поворачиваться в вертикальной плоскости на малый угол относительно звена 2. Это приводит к тому, что положение пассивных контактных элементов относительно опорной поверхности не меняется и сила прижатия остается постоянной.
2. Математическая модель трехзвенного ползающего робота. Расчетная схема робота приведена на рис. 4. Для удобства описания многозвенного механизма введем три относительные системы координат: 01х1у1, 02х2у2, 03хту3, связанные с соответствующими звеньями, ориентация которых относительно абсолютной системы координат 0ху определяется углами ф1, ф2, ф3 [33].
Ус,
О хс х
Рис. 4. Расчетная схема робота
В дальнейшем будем считать, что все звенья робота — абсолютно твердые недеформируемые тела и каждое из звеньев представляет собой стержень длиной ¡^ и массой т, сосредоточенной в центре симметрии звена С, где I = 1...3.
Положение звеньев механизма относительно абсолютной системы координат описывается вектором обобщенных координат [34]:
# = (#1 #2 #3 #4 #5)
(2.1)
где q1 = хС1, q2 = уС1 — координаты центра масс звена 1 относительно Оху, q3 = ф1, = ф2 и q5 = ф3 — углы поворота звеньев.
Система дифференциальных уравнений имеет вид
ф 1^С1 + 1 т2^12 + 1 т1\) + ф 2 (1 ®2 + т3 ) 122с08(ф1 -ф2> + ф 3®3 ^^^ -Фз) +
+ УС1(т2 + т3)^со8фх - хС1(т2 + т3^тфх + ф2 (^т2 + т3) -^т^ - ф2) +
+ ф2т3 /1~3^п(ф1 - ф3) = ¥2 ^т(а2 - ф1) + ¥3 ^п^ - ф1) + ¥4 ^т(а4 - ф1) + М21, 4 2 2 2
Ф2(^2 + 4 т2^2 + т3/22) + ф 1 (2 т2 + т3)^^^ - Ф2) + ф3т3 ^^^ - Ф3) + + 3С1(т2 + 2т3) ф2 - ха(т2 + 2т3) ^п ф2 + ф2 (2 т2 + т3) -^т(ф2 - Ф1) +
2 12^3
+ Ф3т3 -у sin(ф2 - Ф3) = М12 + М32 + 2 sin(ф2 - а3) + ¥,/2 sin(ф2 - а4),
(2.2)
(2.3)
ф3(/С3 +1 т3/32) + ф2 — т3 cos(ф2 - ф3) + ф 1т3 — cos(ф1 - ф3) + уС1т3 —cos ф3 -
- хС1т3 —sin ф3 + фт —sin(ф3 - ф1) + фт —sin(ф3 - ф2) = М23 + ¥4/3 sin(ф3 - а4),
4
/2/3 2
(2.4)
У
L l2 l3
xC1(m1 + m2 + m3) - ф1 ^sin9i(m2 + m3) - ф2 sinp2(m2 + 2m3) - ф3m3 ^sinф3 -
- (pl(m2 + m^cosф1 -cp2(m2 + 2m3)/2cosф2 -pm l^cosф3 = iicosa1 + (2.5) + F2 cos a2 + F3 cos a3 + F4 cos a4,
l1 l2 l3
УC1(m1 + m2 + m3) + ф 1 ^cos ф1(m2 + m3) + ф2 cos ф2^2 + 2m3) + ф3m3-^cos ф3 -
- p2(m2+m3)2sin ф1 - ф 2(m2+2m3)|sin ф2 - p2m3 |sin ф3=F1 sin a1 + (2.6) + F2 sin a2 + F3 sin a3 + F4 sin a4,
где F, i = 1,4 , — модули векторов сил трения, приложенные в точках 0¡соответственно;
Уо,
arcsin
/Т2 . 2 \¡xc "
XO, + Уо,
a¡ =
arccos
/ . 2 ГУ
V-O + -o,
— углы, определяющие направление векторов сил трения в абсолютной системе координат (У0,, — проекции векторов скоростей точек Oj на соответствующие оси системы координат); J C. — центральный момент инерции i-го звена; Mi i+l — момент, действующий на звено i + 1 со стороны звена i, i = 1, 2.
3. Постановка задачи. При помощи полученной математической модели трехзвенного механизма становится возможным решение трех типов задач.
1. Определение обобщенных координат вектора q = q(t) при известных моментах M12, M23, являющихся функциями некоторых переменных (времени, углов ф1, ф3 и т.п.).
2. Нахождение моментов M12, M23, необходимых для достижения определенного положения робота в пространстве, задаваемого вектором q = q(t).
3. Определение моментов M12, M23 при условии минимизации отклонения реальной траектории центра масс робота от заданной, т.е. |#реальн(0 - дзад(0| ^ min, при известных значениях вектора q = 4зад(0.
В данной работе приведены результаты численного решения первой задачи. В дальнейших исследованиях планируется получить решение второй и третьей задач.
4. Модель взаимодействия робота с опорной поверхностью. Как отмечалось ранее, точки О2, О3 робота оснащены элементами, позволяющими управлять силами трения между этими точками и поверхностью [35]. Движение системы происходит за счет управляющих моментов М21 и М32, обеспечивающих перемещения звеньев 1, 3 относительно звена 2, а также действия электромагнитов, позволяющих управлять силами трения. Управление осуществляется по следующему алгоритму.
При определенных углах поворота звеньев 1, 3 управляемые электромагнитом силы трения фиксируют на поверхности звена 2 робота. Таким образом, на рассматриваемую систему периодически накладываются кинематические условия, соответствующие тому, что скорости точек О2, О3 равны нулю при попадании углов поворота звеньев в интервал
ф1 < ф, < ф2, (4.1)
где ф1, ф2 — углы, определяющие интервал фиксации звена 2.
Если условие (4.1) не выполняется, то будем считать, что движение робота происходит по гладкой поверхности, т.е. силы трения отсутствуют.
Далее рассматриваются два типа перемещения многозвенника по плоскости: поперечное (боковое движение) и продольное (движение вдоль самого робота). Такие походки исследовались в [33, 36].
Рис. 5. Последовательность этапов при поперечном движении
5. Алгоритм моделирования поперечного типа движения. Решение системы дифференциальных уравнений (2.2)—(2.6) с учетом (4.1) выполнено численным методом. Для численного нахождения значений обобщенных координат и их производных в различные моменты времени воспользуемся специальным алгоритмом, основанным на методе интегрирования Верле [37]. Его суть в том, что на интервале (t, t + At), где At — шаг по времени, вторая производная считается константой.
Поперечную походку можно представить в виде последовательности этапов, как показано на рис. 5, где черными треугольниками обозначены точки, которые на данном этапе считаются зафиксированными.
Для реализации поперечного вида походки воспользуемся следующей циклограммой управления (рис. 6).
Стоит отметить, что на графиках скоростей в данном случае показано лишь наличие или отсутствие скорости на этапах движения, а н
Для дальнейшего прочтения статьи необходимо приобрести полный текст. Статьи высылаются в формате PDF на указанную при оплате почту. Время доставки составляет менее 10 минут. Стоимость одной статьи — 150 рублей.