МЕХАНИКА ТВЕРДОГО ТЕЛА < 6 • 2008
УДК 539.4.019.1
© 2008 г. А.М. СТАЛЕВИЧ
НЕЛИНЕЙНО-НАСЛЕДСТВЕННАЯ МЕХАНИКА ДЛЯ ОПИСАНИЯ РЕЛАКСАЦИИ И ПОЛЗУЧЕСТИ ОРИЕНТИРОВАННЫХ ПОЛИМЕРОВ
На основе результатов исследований процессов релаксации нагруженного состояния аморфно-кристаллических полимеров (главным образом, волокон из полиэтилентерефталата, полиамида 6, поливинилового спирта и других полимеров) развивается феноменологическая модель нелинейной вязко-упругости на основе представления о количественном распределении частиц по временам релаксации или запаздывания. Наблюдаемое активирующее влияние внешних механических воздействий на спектры релаксации или запаздывания качественно согласуется с особенностями деформирования кри-сталлоподобных тяжей, находящихся в аморфных межкристаллитных прослойках фибриллярной надмолекулярной структуры.
1. Введение. В первых попытках моделирования вязкоупругости полимеров всевозможные механические модели использовались в рамках линейной вязкоупругости, когда внешняя механическая нагрузка никак не влияет на дискретные либо непрерывные распределения релаксирующего модуля по временам релаксации [1]. В то же время для высокоориентированных аморфно-кристаллических образцов различных полимеров -вискозного шелка, полиамида 6, целлюлозы - было установлено, что при увеличении нагрузки вдоль направления преимущественной ориентации время релаксации уменьшается [2, 3], т.е. возникает нелинейность вязкоупругих свойств. Ранее в работах [4, 5] была дана энергетическая интерпретация такой нелинейности у полимеров. При этом действие нагрузки на времена релаксации объяснялось ее действием на значения энергии активации. В работах [6, 7] указывалось, что отклонения от линейной вязкоупругости следует учитывать при построении интегрально-наследственных уравнений для сложных режимов релаксации напряжения или запаздывания деформации. Однако в [1-7] и других работах распределения частиц по собственным временам релаксации или запаздывания в явном виде не рассматривались. Этот недостаток особенно проявлялся в случаях отклонений от линейной вязкоупругости.
2. Постановка задачи. В случаях нелинейной вязкоупругости ориентированного полимера оказываются плодотворными представления о распределениях (или спектрах) молекулярных и надмолекулярных элементов материала по собственным временам релаксации или запаздывания. Для получения именно таких распределений в настоящей статье построение непрерывных распределений по временам релаксации или запаздывания усложняется следующими двумя условиями: деформация каждого отдельно взятого элемента модели обратима и содержит упругую компоненту; любой элемент может отличаться от других элементов только значением времени релаксации или запаздывания.
Рассмотрим построение таких распределений, т.е. спектров релаксации и запаздывания.
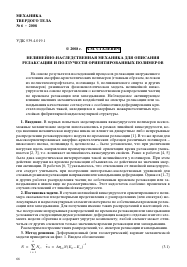
3. Метод решения. Деформационный (или геометрический) вариант механической модели приводится на фиг. 1. Введем обозначения:
n
(3.1)
i = i
О
О
Фиг. 1
где N - количество всех элементов модели, E0 - модуль упругости всей модели; E- модуль вязкоупругости всей модели; E0N_1 - модуль упругости каждого элемента; E^N-1 -модуль вязкоупругости каждого элемента, т.е. модуль каждой левой пружины элемента; T;е - время релаксации каждого из Ni элементов, Ап;е - коэффициент вязкости каждого из N ; элементов (одинаково зависящий от деформации е для всех элементов).
Условие совместности деформаций всех элементов имеет вид е; = е, а условие равновесия каждого из N; для i-го элемента представляет собой дифференциальное уравнение
N (T ;еАО1 + Ао; ) = Eo(T ;ее + се) (3.2)
где Ао; - напряжение i-го элемента; с = EM E01 - коэффициент полноты упругости модели. В режиме простой релаксации, когда е = const, из (3.2) получается релаксирующий модуль ;-го элемента:
Ао;е/е = А E; Et = N 1 E0( с + ( 1- с ) exp (-t/T ;е)) (3.3)
где t - внешнее время, отсчитываемое от момента квазимгновенного приложения деформации е. Решение дифференциального уравнения (3.2) с учетом (3.3) описывается следующим выражением
-1 г дАЕ;е.
АО; = N Eoеt + ^ - s-jfïds (3.4)
o
Сложение только i'-ых элементов дает напряжение
t
N; АО; = О; = N ;N- Eo е, + N,-^ - s А E'iesds (3.5)
o
АЕ'0 = ЭАЕ,^, N А e;, = Еш (3.6)
3* 67
где Eiet - релаксирующий модуль сложенных N; элементов, имеющих одно и то же время релаксации т ; е. Сложение всех элементов модели с учетом (3.4) дает полное напряжение всей модели
n t
X Oi = Ot = Eo£t + Jet - sEesds (3.7)
i = 1 o
где, в соответствии с (3.6), релаксирующий модуль всей модели описывается так
£ E,.Е( = EEt = cE0 + E0(1 - c) £ NN- expI -T- ) (3.8)
i = 1 i = 1 V TiеУ
При суммировании n ^ «> элементов дискретной модели (3.8) заменяется интегрированием некоторой непрерывной функции распределения моделируемых частиц по их временам релаксации
Eet = EM + (Eo - EJ J H-exp(JE)dinтE (3.9)
при соблюдении условия
n +
£ NN- = J HEdinтe (3.10)
i = 1 -ro
где NiN1 - нормированная дискретная функция распределения количества релаксирую-
щих частиц N по их временам релаксации тiE; He - спектр релаксации, или функция распределения числа частиц по логарифмической шкале собственных времен релаксации т e . Принципиальное отличие рассмотренного спектра He от классического спектра [1] помимо самой модели (см. фиг. 1) состоит также в том, что расположение спектра на логарифмической шкале времени релаксации определенным образом (а именно, через среднестатистическое значение тЕ) зависит от деформации e как от параметра, а не как функции времени. Поэтому рассмотренный вариант моделирования назван деформационным или геометрическим. Уравнение состояния модели (3.7) пригодно как для своего дискретного ядра (3.8), так и для непрерывного ядра (3.9) и, вследствие этого, может считаться каноническим. Нелинейность моделируемых вязкоупругих свойств, в отличие от классической линейности [1], накладывает определенные ограничения на производимые математические процедуры. Так, при переходе от уравнения (3.2) к уравнению (3.4) с помощью лапласовых преобразований операционного исчисления и свойств интегральных сверток при дифференцировании функции (3.8) или (3.9) с содержащейся в ней деформацией е следует обращаться как с параметром.
Для простого режима ползучести ew, когда о = const, из уравнения (3.7) получается возможность определения функции податливости Dot по релаксирующему модулю (3.8) или (3.9) данной модели (фиг.1) в символической записи
-ot/о = Dot = p~2{ E-t }-1 = {t}{ E-t}-1 (3.11)
где {EEt} - лапласово изображение оригинала EEt; = - символ преобразования Лапласа. С учетом (3.11) интегральное уравнение (3.7) решается относительно деформации как функции времени при соблюдении указанных выше ограничений:
t
Et = E-1 ot + Jot - sD'osds (3.12)
n
n
Отметим, что иа этот раз, при дифференцировании податливости с напряжением о следует обращаться как с параметром, а не как с функцией времени.
Однако воспользоваться каноническим уравнением (3.12), полученным для той же самой модели (фиг. 1), весьма трудно из-за того, что в соответствии с (3.11) ядро уравнения (3.12) содержит время релаксации, которое в неявном виде зависит от неизвестной величины деформации ег как от параметра.
Для материалов указанного типа вполне удовлетворительным является следующее приближенное решение интегрального уравнения (3.9) [1]:
Яе = ( Eo- EJ
лЪЕп д ln t
(3.13)
показывающее, что производная релаксирующего модуля по логарифму времени по своей сути, так же как и спектр релаксации, отражает распределение частиц материала по временам релаксации. В связи с этим каноническое уравнение (3.7) рекомендуется использовать в виде
lnt
ot = Eo Et + Jet -
дБ, sd ln s
dln s
(3.14)
Ni
Ni
N
I o
Фиг. 2
Тогда физический смысл ядра уравнения (3.14) становится более ясным по сравнению с ядром в уравнении (3.7). Спектральная интерпретация канонического уравнения нелинейно-наследственного типа (3.14) или (3.7) справедливо при любом выборе аппроксимирующей функции для релаксирующего модуля как функции времени, зависящей от деформации как от параметра.
Силовому варианту теории нелинейно-наследственной вяз-коупругости (ННВ) соответствует обобщенная модель, представленная на фиг. 2. По аналогии с предыдущей моделью (фиг. 1), формула (3.1), а также характеристики с, Е0 и Есохраняются. Модулем упругости каждого элемента модели (фиг. 2) становится NE0, а модулем вязкоупругости каждого элемента, т.е. модулем упругости левой пружины, становится Временем запаздывания каждого из N для г-го элемента становится
-1
-1,
= с Д^ o N (Eo- £J
-1
(3.15)
где ДП;о - коэффициент вязкости каждого из N1 для г-го элемента, одинаково зависящий от напряжения у всех элементов. Условие совместности деформации всех элементов имеет вид
X N;Д£; = Et
(3.16)
i = 1
где е( - полная деформация всей модели.
По аналогии с (3.2) уравнение равновесия каждого из N1 для г-го элемента модели при условии с Ф 0 записывается следующим образом
NEo (т i оде i + де ) = т i
т<з + с :o
(3.17)
ДEiNi
(3.18)
o
iE
t = т
ПЕ
ю
n
E
где ei - деформация элементов с одинаковым временем запаздывания тio. В режиме простой ползучести, когда о = const, из (3.17) получается податливость элемента по аналогии с (3.3):
Ае.о/о = A Do = N- EQ1 с_1( 1 - (1 - с) exp (t/T (3.19)
где N_1 Eq1 = AD0 - упругая податливость одного элемента модели; N_1 E J = ADM - вяз-коупругая податливость одного элемента. Решение дифференциального уравнения (3.17) с учетом (3.19) получается по аналогии с (3.4). Имеем уравнение состояния одного из Ni для i-го элемента
t
1 1
Ае; = N1 £04 + А (3.20)
о
Сложение всех элементов модели
п п
£ N;Ае; = £е; = е, (3.21)
г = 1 г = 1
приводит к уравнению состояния всей модели (3.12), где
Eto/о = Dot = eJ - eJ (1 - с) £ NiN-1 exp(-t/Т^ (3.22)
-1 ,
1- с г = 1
представляет собой податливость всей модели, причем = Бга - податливость сум-
п
мы г-х элементов, а £ а = БаР Как видно из (3.22), теперь уже сложностей расче-
г = 1
та по (3.12) нет.
По аналогии с (3.9) при п ^ «> вместо (3.22) получим
пт = Е^1 - Е^( 1 - с) | ёаехр(-
Для дальнейшего прочтения статьи необходимо приобрести полный текст. Статьи высылаются в формате PDF на указанную при оплате почту. Время доставки составляет менее 10 минут. Стоимость одной статьи — 150 рублей.