МЕХАНИКА ТВЕРДОГО ТЕЛА № 3 • 2015
УДК 539.3
© 2015 г. Б. А. ЖУКОВ
НЕЛИНЕЙНОЕ ВЗАИМОДЕЙСТВИЕ КОНЕЧНОГО ПРОДОЛЬНОГО СДВИГА И КОНЕЧНОГО КРУЧЕНИЯ ВТУЛКИ ИЗ РЕЗИНОПОДОБНОГО МАТЕРИАЛА
В рамках нелинейной теории упругости на примере продольного сдвига и кручения цилиндрической втулки из эластомера, заключенной между жесткими обоймами исследуется зависимость крутильной жесткости от величины продольного сдвига и зависимость жесткости продольного сдвига от угла закручивания для двух потенциалов энергии деформации. Предлагается аналитическая модель взаимодействия продольного сдвига и поперечного кручения в асимптотическом приближении.
Ключевые слова: конечные деформации, гиперупругость, несжимаемость, конечный продольный сдвиг, конечное кручение, асимптотическое приближение.
1. Вторичные деформации в нелинейной теории упругости. В нелинейной упругости известен факт возникновения под действием продольного сдвига полей напряжений и деформаций в поперечной плоскости, независящих от координаты вдоль продольной оси. Такие деформации называются вторичными [1, 2]. Тот факт, что в несжимаемом материале антиплоская деформация возможна только в специальном классе материалов, известен давно (см., например, [3]), и в [4] рассматривались классы материалов, в которых антиплоская деформация существует, например в неогуковском или Муни— Ривлина. Между тем суперпозиция продольного сдвига и деформации в поперечной плоскости существует для всех изотропных резиноподобных материалов. Общие результаты по факту существования вторичных деформаций можно найти в [5]. В этой статье рассмотрены возможные случаи редукции трехмерных краевых задач нелинейной теории упругости к двумерным как самодостаточным с помощью полуобратного метода. Всего рассмотрено четыре класса таких редукций. К одному из них и принадлежит суперпозиция продольного сдвига и деформации в поперечной плоскости. Список работ, приведенный выше, далеко неисчерпывающий. Но основная масса работ посвящена проблеме существования продольного сдвига без плоской составляющей, то есть антиплоской деформации. Предлагаемая статья, наоборот, посвящена взаимному влиянию продольного сдвига и деформаций в поперечной плоскости.
2. Постановка граничных задач для совокупности продольного сдвига и деформации в поперечной плоскости, не зависящей от координаты вдоль продольной оси. В этой части общая постановка задач нелинейной упругости приводится к форме, удобной для дальнейшего рассмотрения. Ориентируем пространственную декартову систему координат так, чтобы вектор перемещения и* имел вид
и* = Я* - г* = Я - г + ^к (2.1)
где Я и г — радиус-векторы точек в плоскости, ортогональной оси 02, в текущей и от-счетной конфигурациях соответственно. Здесь и ниже звездочкой отмечены векторы и тензоры второго ранга в трехмерном пространстве, а отсутствие звездочки означает
"плоские" части соответствующих пространственных векторов и тензоров второго ранга. Совокупность конечного продольного сдвига и конечной деформации в поперечной плоскости, независящей от координаты вдоль продольной оси, кратко можно назвать цилиндрической деформацией (тело цилиндрическое до деформации остается таковым и после нее). В линейной теории упругости нет нужды для такого термина, поскольку цилиндрическая деформация распадается на плоскую и антиплоскую, которые не влияют друг на друга. Для цилиндрической деформации имеем
И = X (х, у) 1 + У (х, у) ], г = XI + у$, w = w (х, у) (2.2)
где (х, у) — координаты точек в плоскости ХО У в отсчетной конфигурации, а (X, У) — координаты тех же точек в той же плоскости в текущей конфигурации, {1, ], к} — базис пространственной декартовой системы координат.
Введем обозначения для операторов Гамильтона в отсчетной и текущей конфигурациях в 0 0 0 виде V * = V + кд/дг и V* = V + кд/дг, здесь V = 1 д/дх + ) д/ду и V = И1 д/дх + И2 д/ду — "плоские" операторы Гамильтона в базисах отсчетной и текущей конфигураций. Базисные векторы последней вычисляются по (2.2):
И а И = И 2 х к И 2 _ к X И
д х д у И1 ■ И 2 X к И1 ■ И 2 X к
Следуя [6] напряженное состояние однородного изотропного гиперупругого несжимаемого материала с потенциалом энергии деформации Ж(1*, I*), где I*, I* —
0 0
главные инварианты меры деформации Фингера Ф* = (V * К*) • V* И*, можно описать с помощью тензора истинных напряжений Коши 8* в форме
дж^ дж.
8* = 2
дЖф* -дЖ ф-1* +уЕ*
*
_д1* д1 *
(2.3)
Точка означает скалярное произведение, значок Т — транспонирование, у — функция гидростатического давления, а Е* = 11 + Ц + кк. Дифференциальные операторы действуют только на первый множитель справа, не являющийся оператором.
В рамках (2.1) выражения со звездочкой можно представить через выражения без звездочки в виде
0 0 0 0 0 0 V* И* = У И + У wk + кк, (V* И*)т = (V И)т + к V w + кк
V*г* = Vг -Vw к + кк, (У*г*)т = (Уг)т - kVw + кк
ф* = ф + V w •V Ик + к V w •V И + (1 + V w •V w)kk
Ф*-1 = ф-1 -Vwк - кУw + УwVw + кк, Е* = Е + кк
0 0 т
Здесь Е = 11 + Л, Ф = V И -V И — "плоская" мера деформации Фингера. Главные инварианты Ф* представляются формулами
0 0 0 0 0 0 I * = 11 + 1 + V w ■ V w, 12* = 12 +11(1 + V w ■ V w) - V w ■ О -V w, 13* = 12
где /1 = Е •• Ф, /2 = 1/2[(Е •• Ф)2 - Ф •• Ф], О = V Я -V Я' Коши.
Подставляя полученные выражения в формулу (2.3), будем иметь
плоская" мера деформации
8* = 2-
+ к
Ш. ф -йК (ф-1 + ^ V*) + у Е
д/* д/*
о о
-V * -V К +-V*
д/ *
д/ *
+
дwV V» +дК V
-V * - V Я +-V*
о
к +
-(1 + V * - V *)---+ у
д/*
д/*
(2.4)
Структура выражения (2.4) показывает, что даже в отсутствие деформации в попе-
о
речной плоскости (Ф = Ф-1 = VЯ = Vг = Е) при дК/д1* Ф 0 только за счет продольного сдвига возникает поле напряжений в этой плоскости
0 о
8 р1 - 2
Т7 дК^у ^
у 0Е--V * V *
д/2*
(2.5)
о о V = V г -V = V,
у о = дК/ д/* - дК/д/2* + у
Условие несжимаемости /2 = 1 задается соотношением \2
(Е •• Ф)2 - Ф •• Ф = 2
Уравнения равновесия в отсутствие массовых сил V* ■ 8* = о принимают вид
(2.6)
Уу = -V ■
дК Ф-Ш. (ф-1 +
д/*
(2.7)
о о -V * V Я +-V*
_д /* д/*
= о
(2.8)
В отсутствие деформации в поперечной плоскости (2.7) и (2.8) перейдут в
о о (_ о о Л
Ууо
о ( о
ЙКр гу
-V * V *
уд/2*
С \ о
дК , дК
+
чч* д/2*у
V *
= о
Исключая функцию гидростатического давления в (2.7), получим
(2.9)
УхУ'
дК ф -дК (ф-1 + д/*
д/*
= о
(2.10)
Здесь значок х означает векторное произведение. При отсутствии деформации в поперечной плоскости будем иметь
о о ГдК 0
Ух V-
о ^
V * V *
\д/ 2
д/*
= о
(2.11)
5 Механика твердого тела, № 3
129
2Н
/■-.л
'А
I. а. а. :
02^
02Я,
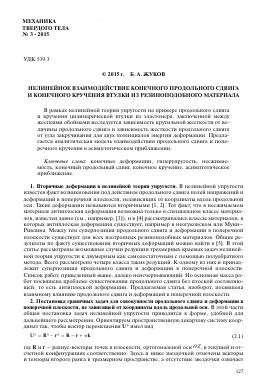
Фиг. 1
Таким образом, при отсутствии деформации в поперечной плоскости функция w
должна удовлетворять при дЖ/д1* ^ 0 сразу двум уравнениям: второму в (2.9) и (2.11). Отсюда следует известный факт, что антиплоская деформация может существовать без
ограничений на вид потенциала только в материалах, для которых д Ж/д1* = 0, поскольку в этом случае уравнение (2.11) выполняется тождественно. В общем же случае необходимо рассматривать связную систему (2.6), (2.7), (2.8) и (2.10).
Исследование влияния потенциала энергии деформации на взаимодействие продольного сдвига и деформаций в поперечной плоскости в данной работе ограничивается рассмотрением двух потенциалов. Это известные потенциалы Муни—Ривлина [7]
Ж = ц/4 • [(1 + в) (I* - 3) + (1 - в) (I* - 3)] и Исихары-Хасицумэ-Татибаны [8]:
Ж2 = ц/4 • [(1 + в) (I* - 3) + (1 - в) (I* - 3)] + М* - 3)2 (2.12)
Здесь ц — модуль сдвига линейной теории упругости, р, р1 — константы упругости материала. Причем константа р е [-1,1 ] безразмерная, а р1 имеет размерность напряжения. Такое представление гарантирует, что при бесконечно малых деформациях все уравнения состояния перейдут в закон Гука [9].
3. Взаимное влияние конечного продольного сдвига и конечного кручения цилиндрической втулки из резиноподобного материала. В качестве примера рассматривается деформация цилиндрической втулки, заключенной между жесткими обоймами. Внутренняя обойма закреплена неподвижно, а внешней сообщается продольное смещение вдоль оси симметрии втулки на величину А и поворот вокруг этой оси на угол 0. Обозначения размеров приведены на фиг. 1. Решение проводится полуобратным методом. Втулка считается достаточно длинной, чтобы пренебречь торцевыми эффектами и считать напряженно-деформированное состояние независящим от %. Силовое граничное условие на торцевой поверхности при этом будет выполняться интегрально. В этих условиях для описания продольного сдвига и кручения между жесткими обоймами можно использовать кинематическую гипотезу коаксиальных сечений, то есть сечения цилиндрические и коаксиальные до деформации остаются таковыми и после деформации (ось единая для всех таких сечений совпадает с осью симметрии втулки). В цилиндрической системе координат в силу принятой гипотезы радиус вектор точек в текущей конфигурации задается соотношением
R* = р [cos (ф + у (р)) i + sin (ф + у (р)) j] + [z + ю(р)] к = = р [cos у (р)еr + sin у (р) еф] + [z + ю (р)]к
Здесь у(р) и ю(р) — подлежащие определению функции, {еr, е^, к} — единичный базис цилиндрической системы координат. Условие несжимаемости (2.6) выполнится тождественно.
Подставляя (2.12) и (3.1) в (2.7) и (2.8), получим связанную систему нелинейных уравнений для определения у (р), ю (р) и у (р):
2 3 3 2 2
(3у' + ру'') + (20р у' + 12у'ю' + 12р у' у'' + 8ру'ю'ю'' + 4у''ю' )Pi = 0 (3.2)
2 2 2 3 3 3 2
(<о' + рю'') + (12р ю'у' + 12рю' ю'' + 4ю' 8р ю'у'у'' + 4р у' ю'')Р1 = 0 (3.3)
, 2-в ,2 + 1 -Р, 2 , , „ч + 1 -в ,2
Y = - р\[/ +—-(р у у + ю ю ) + —-ю
2 2 4р
2 2 3 4 2 2
- (4р у 'у" + 4ю'ю'' + 4ру' - 2р у' + ру' ю' )Р1
(3.4)
Для (3.1) единичный нормальный вектор N* в текущей конфигурации [6] на внешней боковой поверхности втулки имеет выражение
N* = (еr • G-1 • еr)-1/2Vr • еr = эг
где эг — единичный вектор "повернутого" базиса
эг = cos [у (р)] еr + sin [у (р)] еф, = - sin [у (р)] еr + cos [у (р)] еr 3z = к
поэтому выражения для продольного усилия Q и крутящего момента M на внешней обойме радиуса R¿ принимают вид
h 2п h
Q = Цэr • S*
Для дальнейшего прочтения статьи необходимо приобрести полный текст. Статьи высылаются в формате PDF на указанную при оплате почту. Время доставки составляет менее 10 минут. Стоимость одной статьи — 150 рублей.