ИЗВЕСТИЯ РАН. ТЕОРИЯ И СИСТЕМЫ УПРАВЛЕНИЯ, 2014, № 3, с. 124-133
СИСТЕМЫ УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ
УДК 621.313.024; 681.30.57
НЕЛИНЕЙНЫЕ МОДЕЛИ ДИНАМИЧЕСКИХ ПРОЦЕССОВ В СИСТЕМАХ ИМПУЛЬСНОГО УПРАВЛЕНИЯ БЕСКОНТАКТНЫМ ДВИГАТЕЛЕМ ПОСТОЯННОГО ТОКА
© 2014 г. В. А. Кузовкин, В. В. Филатов, М. В. Чумаева
Москва, ФГБОУВПОМГТУ "Станкин" Поступила в редакцию 02.09.13 г., после доработки 24.12.13 г.
Представлены разработанные авторами нелинейные математические и имитационные модели следящей системы широтно-импульсного управления бесконтактным двигателем постоянного тока в составе станочного электропривода. Приведены результаты анализа влияния нелинейностей широтно-импульсного преобразователя на временные и частотные характеристики системы управления методами гармонического баланса, медленно меняющихся амплитуд и численными методами имитационного моделирования.
Б01: 10.7868/80002338814030111
Введение. На современном этапе в электроприводах металлорежущих станков нашли применение надежные бесконтактные двигатели постоянного тока (БДПТ). Требования к диапазону изменения скорости функционирования электропривода, быстродействию и точности обработки на станках постоянно повышаются. Заданное качество процессов может достигаться применением эффективных дискретных алгоритмов управления в следящем приводе, которые сегодня осуществляются микроконтроллерами, в сочетании с соответственно выбранными конструктивными и электромагнитными параметрами электрической машины [1, 2]. В современном следящем приводе непосредственное управление режимом электромеханического преобразователя, а также изменение структуры управления осуществляется посредством широтно-импульс-ной модуляции управляющих сигналов (ШИМ-управление) с электронным переключением цепей питания обмоток статора двигателя [3]. Существенным фактором, оказывающим влияние на эффективность управления, является учет разного рода нелинейностей динамических процессов, в частности нелинейности ШИМ. В предлагаемой статье приведен анализ нелинейностей, обусловленных ограничением максимальной ширины импульса и зависимостью длительности модулируемых импульсов от входного сигнала [4].
1. Структура и алгоритм построения математической модели следящей системы ШИМ-управле-ния электромеханическим преобразователем. В основе анализа следящей системы ШИМ-управ-ления принята модель трехфазного БДПТ с двухполюсным ротором. ШИМ управляющего сигнала производится независимо для каждой из трех фаз А, В, С двигателя (рис. 1).
Модуль движения содержит объект управления, т.е. электромеханический преобразователь (ЭМП), а также датчики скорости Д1 и положения ротора Д2. Силовой электронный преобразователь (СЭП) образован коммутатором, ШИМА(В, С) и регуляторами Рег1А(В, С) и Рег2А(В, С). В компьютерный модуль входят информационно-измерительное устройство (ИИУ) и устройство сравнения (С). Задающее воздействие из. в(?) вырабатывается задатчиком (З). Протекающие в системе процессы характеризуются 9(0 — углом поворота и ЗД?) — угловой скоростью вращения ротора, создаваемыми электромагнитным моментом машины Мэ(?) (управляемые величины). В качестве возмущающего воздействия рассматривается момент сопротивления нагрузки на валу двигателя Мсн(?). Устройство управления вырабатывает управляющие напряжения иА(В, С)(?) по отклонению еА(В, С)(1) значений напряжений обратной связи Иц2, 3)(?) от задающего воздействия из. в(?) [5].
Общая математическая модель системы управления ЭМП строится на основе совокупности описаний электромагнитных процессов в каждом канале, для каждой обмотки статора. При построении модели приняты упрощающие допущения:
не учитываются взаимные индуктивности, так как значения собственных индуктивностей обмоток статора ЬА(В> С) значительно больше взаимных индуктивностей;
ИИУ
- ШИМл Рег2л
Рег1в — ШИМВ Рег2в
Рег1с — ШИМС Рег2с
СЭП
Ид1(П)
"д2(0>
П(0
Рис. 1. Структура модели ШИМ-управления трехфазным БДПТ
,-9
¿л
РЭ ! ил ЛЧ
"ФИ(Л)
ШИМ
"Ло.с.ф
VЛ 1 Vл и/2 и
I- 0 • 0
- \
• Ь/2 в
Рис. 2. Эквивалентная нелинейная система: а — структурная схема, б, в — характеристики релейного элемента
электромагнитная система машины симметричная, что обеспечивается ее конструктивным исполнением;
предполагается линейный режим работы магнитной системы ЭМП.
Уравнения электрического состояния якорных обмоток и выражение развиваемого электромагнитного момента как сумма составляющих момента от действия каждой обмотки учитывают их пространственное расположение. Суммарный развиваемый на валу момент расходуется на преодоление момента сопротивления нагрузки рабочего органа станка, а также преодоление моментов инерции и внутреннего трения.
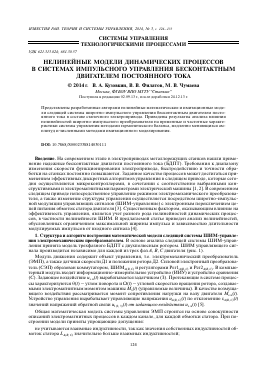
2. Анализ влияния нелинейности ШИМ-управления методом гармонического баланса. Нелинейности модели системы ШИМ-управления ЭМП могут быть проанализированы с использованием эквивалентной модели системы, содержащей типовой нелинейный элемент "двухпозицион-ное реле с гистерезисом" (рис. 2, а). Характеристика релейного элемента может быть симметричной (рис. 2, б) и несимметричной (рис. 2, в). Симметричная относительно горизонтальной оси релейная характеристика имеет развертку в виде двухполярных импульсов, несимметричная — в виде однополярных.
В структурной схеме системы, эквивалентной системе ШИМ-управления ЭМП (рис. 2, а), объект управления представляет линейную часть (ЛЧ). ШИМ заменяется последовательным соединением релейного элемента (РЭ) с амплитудой и и формирователя прямоугольных импульсов (ФИ) с передаточной функцией
КИ(у) = 1 - ехр(-т;у), где I — номер такта, — ширина импульсов 1-го такта.
Формирование импульсного сигнала в эквивалентной системе произведено для сигнала отклонения ел(0, изменяющегося по гармоническому закону
е л (О = е ао + ит 8т ш.
(2.1)
а
Рис. 3. Преобразование входного гармонического сигнала в ШИМ
Сформированный сигнал мА[еА(?)] представляет собой последовательность однополярных импульсов с амплитудой и и шириной (рис. 3):
т, 2 1' ' = 2к (2.2)
[у 4 — у 3, i = 2k + 1, к = 0,1,
В выражении (2.2) значения аргументов ..., определяют ширину импульсов на периоде T (рис. 3). С другой стороны, т1 можно представить [5] как нелинейную функцию вида
T = x|s a (T, (2.3)
где х = const.
ЭМП обладает свойством фильтра низких частот, поэтому для исследования периодических режимов в рассматриваемой системе ШИМ-управления ЭМП возможно применение метода гармонической линеаризации [6]. Реакцию РЭ на гармонический сигнал (2.1) с использованием этого метода, в изображениях, можно описать как
v = v0 + Wp3(UJ(sa -6ao). (2.4)
В выражении (2.4) Wra(Um) = q(Um) + jq~(Um) есть частотная передаточная функция релейного элемента, не зависящая от sA0. Коэффициенты гармонической линеаризации выходного сигнала релейного элемента v0 = a0/2, q(Um) = b1/Um, q~(Um) = ax/Umтакже не зависят от sA0 (a0, a1, b1 — коэффициенты разложения функции v(t) в ряд Фурье). Учитывая, что v(t) = Urn интервале у3], коэффициенты гармонической линеаризации (v0, q( Um), q~( Um)) при sA0 = Um = Uимеют следующие выражения:
v 0 = —, q(—) = —cos y1, q(U) = - 2sin y1 (2.5)
2 п п
В условиях этих не ограничивающих общности предположений передаточная функция ШИМ зависит только от его параметров: амплитуды U и периода T (через и у2):
^шим(—, j ю, V1, V 2) = Wp3—, У1)№фи(/ ю)-
Такую же зависимость имеет и передаточная функция разомкнутой системы: ^раз(—, jЮ, V1, V2) = ^шим(—, /Ю V1, V2)^лчС/Ю>
На основании выражений (2.1)—(2.3) и (2.5) может быть получена связь коэффициента х с параметрами ШИМ:
= {(¥2 - ¥ 1)/[—(1 + sin(V1 + 2kT))],
Х W4 -¥3)/[—(1 + sin(¥3 + (2k + 1)T))], к = 0,1,...
0.4 0.2 0 -0.2 -0.4 -0.6 -0.8
-1.0
- 1т
а
ит2 ит3 Re
У л )
_-1/»шим1(/ю) \ ^уУ
1111 .....
0.4 0.2
0
-0.2 -0.4 -0.6 -0.8 -1.0
_ 1т
б
ит1 ит2 ит3 Re
А -1/»шим1(ч.) ч
. 1 1111 .....
-1.0-0.8-0.6-0.4-0.2 0 0.2 0.4 0.6 0.8 1.0 -1.0-0.8-0.6-0.4-0.2 0 0.2 0.4 0.6 0.8 1.0
Рис. 4. Характеристики периодических режимов нелинейной модели: а — при изменении частоты ю*, б — при изменении амплитуды и**
"з.в(0
"ОН
мс.н(0
МО
Рег1л ШИМЛ Рег2Л ЭМПЛ
Да
пл(г)
Рис. 5. Структура модели канала Л системы ШИМ-управления БДПТ по скорости
Методом гармонического баланса по частотной передаточной функции линейной части ЖЛЧ(/ю) и передаточной функции нелинейной части ^ШИМ( V, ю, у2) определяются параметры периодического режима (у*, ю*) системы [7]. Значение параметра V* определяют при фиксированных и Пара (ю*, V*) — частота и амплитуда периодического режима. Устойчивость найденных периодических режимов исследуется графическим способом по методу Гольдфарба с применением критерия Найквиста (рис. 4).
В результате проведения анализа нелинейной системы методом гармонического баланса с применением гармонической линеаризации устанавливается связь параметров периодических режимов с параметрами системы управления: амплитудой ШИМ V, периодом следования импульсов Т и начальным условием Для анализа качества системы используется амплитудная частотная характеристика замкнутой системы. По этой характеристике определяются косвенные показатели качества управления: показатель колебательности М, частоту пропускания юпр, частоту среза юср, резонансную частоту юрез. Затем осуществляется оценка значений времени регулирования системы = (1...2)2я/юср и перерегулирования а.
3. Анализ переходного процесса нелинейной модели с помощью метода медленно меняющихся амплитуд. Предположение фильтрующих свойств обмоток ЭМП позволяет определять развиваемую им мощность и момент вращения ротора через действующее значение напряжения, подаваемого на обмотки фаз статора, а также делает возможным рассматривать работу БДПТ как "медленного" преобразователя. Такой подход разрешает характеризовать процессы в двигателе медленными, т.е. мало изменяющимися за период колебаний, амплитудой и фазой выходных переменных. Поэтому для исследования переходных динамических процессов выбран метод медленно меняющихся амплитуд [8].
Дифференциальное уравнение канала БДПТ, согласно схеме на рис. 5
Для дальнейшего прочтения статьи необходимо приобрести полный текст. Статьи высылаются в формате PDF на указанную при оплате почту. Время доставки составляет менее 10 минут. Стоимость одной статьи — 150 рублей.