ПРИКЛАДНАЯ МАТЕМАТИКА И МЕХАНИКА
Том 74. Вып. 4, 2010
УДК 531.31
© 2010 г. А. А. Зевин
НЕОБХОДИМЫЕ И ДОСТАТОЧНЫЕ УСЛОВИЯ УСТОЙЧИВОСТИ
ЛИНЕЙНЫХ СИСТЕМ С ПРОИЗВОЛЬНЫМ ЗАПАЗДЫВАНИЕМ
Рассматривается система линейных дифференциальных уравнений с гурвицевой матрицей А и переменным запаздыванием. Система считается устойчивой, если она устойчива при любой функции запаздывания т(t) < к. Найдено необходимое и достаточное условие устойчивости, выраженное с помощью собственных значений матрицы А и величины к. Установлено, что функция т (t), отвечающая критическому значению к, постоянна либо кусочно-линейна в зависимости от того, какому собственному значению матрицы А (комплексному либо действительному соответственно) она отвечает. В первом случае критические значения к в системах с переменным и постоянным запаздыванием совпадают, во втором — различаются весьма незначительно.
1. Введение. Во многих математических моделях систем с запаздыванием детальная информация о функции запаздывания отсутствует. При исследовании устойчивости таких систем обычно предполагается, что известна лишь верхняя граница этой функции и (или) ее производной. Требуется найти условия, гарантирующие устойчивость системы для любой функции, удовлетворяющей указанным ограничениям.
Во многих случаях слагаемое, содержащее неизвестное запаздывание, также точно не задано. Так, типична система
х(0 = Ах(0 + Г(х(t - т^),0). х е Яй, т(0 е [0,к < ад], \$(х^)|| < к\|х||. (1.1)
Здесь А — заданная гурвицева матрица (действительные части всех собственных значений отрицательны), т (t) и f (х ^) — любые кусочно-непрерывные функции, удовлетворяющие указанным выше условиям, ||-|| означает эвклидову норму.
Система (1.1) считается абсолютно устойчивой, если для любой заданной ограниченной непрерывной начальной функции х(г) = ф(г), г е [—к, 0] и любых допустимых т (t) и f (х ^) соответствующее решение удовлетворяет условию
х(0 ^ 0 при г ^ ад. (1.2)
Задача заключается в отыскании условий устойчивости системы, выраженных с помощью А, к и к.
Для решения таких задач разработаны разные методы, основанные главным образом на использовании функций или функционалов Ляпунова (см., например, монографии [1—5] и обзор [6]). В результате задача сводится к отысканию положительно определенного решения матричного неравенства либо к решению уравнения Рикатти. Соответствующие условия устойчивости являются лишь достаточными и существенно зависят от выбора исходной функции или функционала.
Необходимые и достаточные условия устойчивости получены для весьма ограниченного числа систем. Так, было доказано [7], что в случае симметрической матрицы А
для абсолютной устойчивости системы (1.1) с любым конечным h необходимо и достаточно, чтобы
k < -1, (1.3)
где А < 0 - наибольшее собственное значение матрицы A. При f = -Ах и любом т(г) система неустойчива, так как уравнение (1.1) имеет постоянное решение х (г) = а, где а — собственный вектор, отвечающий собственному значению А (заметим, что именно в силу постоянства данного решения найденное условие устойчивости является необходимым при любом т( г)).
Заметим, что для системы (1.1) с заданной функцией 1"(х,г) какие-либо необходимые и достаточные условия устойчивости отсутствуют (в том числе и в случае симметрической матрицы A). Таким образом, точное условие (1.3) получено благодаря возможности выбора "наихудшей" функции 1"(х,г) из заданного множества.
Интересно, что наличие в системе неизвестного запаздывания т(г) также может упрощать решение по сравнению с системой, в которой запаздывание задано либо отсутствует. Такая ситуация имеет место в классической задаче Лурье [8] об устойчивости системы с неизвестной скалярной функцией ф (а, г), лежащей в заданном секторе (а = Ьх +... + Ь„х„). Точное решение этой задачи не известно: многочисленные публикации предлагают лишь достаточные условия устойчивости (см. обзор [9]). Между тем для такой задачи с произвольным запаздыванием (ф = ф(ст(? — т(0,0) точное решение было найдено [10].
Для системы с несколькими скалярными нелинейностями указанного вида, содержащими неизвестные запаздывания т (г), необходимое и достаточное условие устойчивости было найдено [11] при условии неотрицательности соответствующей весовой [12] матрицы. На границе области устойчивости система имеет постоянное решение, поэтому указанное условие инвариантно относительно функций т,(г).
В данной работе рассматривается система
х(г) = Лх(г -т(г)), т(г) е [0,к ], (1.4)
где A — заданная гурвицева матрица. Система считается устойчивой, если при любой начальной функции
х(г) = и(г), г е [-к,0] (1.5)
соответствующее решение х(г) удовлетворяет условию (1.2).
Очевидно, что при h = 0 и, следовательно, при достаточно малых h система (1.4) устойчива. Однако ввиду отсутствия членов, не содержащих запаздывания, она устойчива только в конечном интервале к е [0,к*) [6].
При исследовании устойчивости система (1.4) обычно приводится к виду [13] г г
х(г) = Лх(г) - Л | х(= Лх(г) - Л2 | х(5 --ф))& (1.6)
г-т(г) г-т(г)
Затем применяются известные методы, что приводит к достаточным условиям устойчивости, содержащим величину h. Какие-либо необходимые и достаточные условия устойчивости такой системы отсутствуют.
В данной работе дано точное решение рассматриваемой задачи, а именно: найдены критическое значение параметра h и соответствующая функция т(г), выраженные с помощью собственных значений матрицы A.
2. Предварительные результаты. Рассмотрим скалярное уравнение
x(t) = рx(t -т(t)), Р< 0, T(t) е [0,h <<ю] (2.1)
при начальной функции (1.5).
Теорема 1 [2]. Для устойчивости уравнения (2.1) необходимо и достаточно, чтобы
-eh < 3/2. (2.2)
Доказательство. Оригинальное доказательство этой теоремы ([2], с. 222-234) весьма трудоемко, поэтому дадим простое доказательство.
Прежде всего отметим, что если решение x(t), начиная с некоторого t*, сохраняет постоянный знак, то оно удовлетворяет условию (1.2).
Действительно, пусть x(t) > 0 при t > t*, тогда в силу уравнения (2.1) x(t) монотонно убывает при t > t* + h. При этом Х(t) = рx(t - т(t)) < px(t) и, следовательно,
x(t) < x(t* + h)exp[P(t -1* - h)] (2.3)
Рассмотрим осциллирующее решение x(t) (x(t) = 0,i = 1,2,...). Пусть
x(t) < 0 при t e (t1,t2), x+ = maxx(t) > 0 при t e[t1 -2h,t1). (2.4)
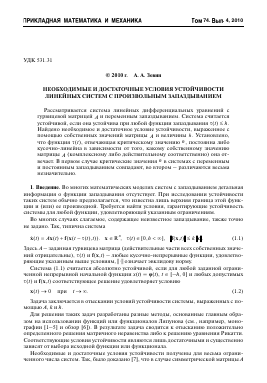
Найдем нижнюю оценку x(t) при t e (ti,t2), выраженную с помощью x+. В силу соотношений x(t]) = 0, x(t) < x+ и уравнения (2.1) имеем (см. фигуру)
x(t) < x*(t) при t е [t1 - 2h,t1), x*(t) =Гв(^ - t)x+ ' е [t+,tl), t + = t1 + p-1 (2.5)
Lx+, t < t+
Учитывая соотношения (2.1) и (2.5), получим
t t x(t) = pjx(s - T(s))ds > x*(t) = в jx*(s,h)ds при t e (t1,t1 + h] (2.6)
t1 t1
x*(t,h) = maxx*(s) при s e [t - h,t].
Любое неположительное на (tt + h) решение возрастает при t > ^ + h, поэтому x(t) > x*(tx + h).
Пусть -ß h > 1, тогда
itu\-lx+' t e [t+t+ +h] m\
X*(t'h) -jx*(t - h), t e [t + + h, t1 + h] {1J)
и с помощью неравенств (2.6) и (2.5) получим
x_ = minx(t) > x*(t1 + h) = x+(1 + 2ßh)/2. (2.8)
Следовательно, при условии (2.2) |x_| < sx+, где s < 1. Очевидно, что при -ßh < 1 это неравенство тем более справедливо.
Аналогично можно показать, что при условии (2.2) и заданном x_ = minx(t) < 0 при t е [t2 - 2h,t2] справедливо неравенство maxx(t) < s|x- при t e (t2,t3), и т.д. Следовательно, любое решение x(t) удовлетворяет условию (1.2).
Докажем необходимость условия (2.2). Пусть -ßh = 3/2, x(t+) = x+. Положив
T(t) 4 -1+, t e [t+,t + + h) (2.9)
|r(t) = t - h, t e (t + + h, t1 + h],
найдем, что соответствующее решение x(t) = x*(t) при t e [t+,ti + h]. Следовательно, x(t1 + h) = x*(t1 + h) = —x +. Продолжив периодически T(t) на (t1 + h,w), найдем, что решение x(t) периодично, т.е. уравнение (2.1) неустойчиво. Рассмотрим теперь систему
x (t) = ßx1(t - T(t)) + ®x2(t - T(t)) , xx2(t) = - ®x1 (t - T(t)) + ßx2(t - T(t)) 1Q)
ß< 0, x(t) e [0, h < да]; x(t) = ul(t), i = 1, 2; t e [-h, 0]), .
где ui(t) — любые заданные функции.
Теорема 2. Для устойчивости системы (2.10), (1.2) необходимо и достаточно, чтобы
h < h* = --r=1-arctgA. (2.11)
д/ß2 + ю2 N
Доказательство. Заменой x1 = rcosф, x2 = rsin9 приведем уравнения системы (2.10) к виду
Г(t) = r(t - т(0){Рcos[[(t) - ф(? - x(t))] - rasin[[(t) - [(t - x(t))]}
Ф(t) = -r(t - T(t)){sin[t) - ф(t - T(t))] + racos[t) - [(t - T(t))]} (2.12)
r(t)
Заметим, что функции r(t - T(t)) и ф(t - т(t)) при t - T(t) e [-h,0] определяются начальными условиями u(t).
Положим R = ln r, тогда r(t) = r(t)R (t). Переходя к переменной ф, из системы (2.12) найдем
dR(ф) _ msinп(Ф,9(ф)) -вcosп(ф,9(ф)) (2 13)
^ф в sin п(ф,9(ф)) + ©cosn^,9^))
где
П(ф,О(ф)) = ф-ф[t(ф) -О(ф)], О(ф) = т(t(ф)). (2.14)
Положив в системе (2.13) ю = ^cos8, в = ^sin8, получим
= tg[Ti(9,S(9)) -5]; 5 = arctgв. (2.15)
dq ю
Правая часть равенства (2.15) п-периодична по п, поэтому будем считать, что Пе (-п/2 + 8,п/2 + 8). Так как, по условию, Р< 0, из системы (2.12) следует, что ф (t) > 0 при ю < 0 и ф (t) < 0 при ю > 0.
Пусть ю < 0. Система (2.12) устойчива, если r(t) ^ 0 и, следовательно, R(t) ^ -ж при t ^ да, т.е. R(ф) ^ -да при ф ^ да. С учетом монотонности ф(0 из соотношений (2.14) и (2.13) найдем, что функция О (ф) и, следовательно, функции п (Ф, & (Ф)) и dR( ф) / dф возрастают при возрастании т. Следовательно, система (2.12) устойчива при любом T(t) < h, если только она устойчива при т(t) = h.
Так как Р < 0, то при т = 0 система (2.10) устойчива. Следовательно, при малых постоянных т все корни характеристического квазиполинома также лежат в левой полуплоскости. При критическом значении т = h* появляется корень гк, где А, - действительное число. Ему отвечает решение
xi(t) = x10exp( ik t), x2(t) = x20exp(;X t). (2.16)
Подставив выражения (2.16) в систему (2.10), получим систему двух алгебраических уравнений относительно x10 и x20, откуда следует, что
x10 = _ Х20 = mexp(-'lh*)
x 20 x10 гк- в exp(_i'kh*)
поэтому x20 = x10exp(in/2). Учитывая равенства (2.16), найдем, что действительное решение системы (2.10) с точностью до сдвига по t имеет вид
x1(t) = c cos(Xt), x2(t) = csin(Xt). Таким образом
Для дальнейшего прочтения статьи необходимо приобрести полный текст. Статьи высылаются в формате PDF на указанную при оплате почту. Время доставки составляет менее 10 минут. Стоимость одной статьи — 150 рублей.