МЕХАНИКА ТВЕРДОГО ТЕЛА № 1 • 2014
УДК 621.83
© 2014 г. Е. С. БРИСКИН, Я. В. КАЛИНИН, А. В. МАЛОЛЕТОВ, В. В. ЧЕРНЫШЕВ
ОБ ЭНЕРГЕТИЧЕСКОЙ ЭФФЕКТИВНОСТИ ЦИКЛОВЫХ МЕХАНИЗМОВ
Рассматриваются цикловые механизмы с одной степенью свободы, приводимые в движение двигателями различных типов: электродвигателями постоянного и переменного тока, двигателями внутреннего сгорания и другими. Ставится задача о видоизменении структуры механизма за счет присоединения к нему дополнительных звеньев или изменения параметров исходного механизма и режима его работы для обеспечения минимума тепловых потерь в приводном двигателе. Задача решается на основе требования минимума функционала, определяющего необратимые потери мощности.
Показано, что для рассматриваемых типов двигателей для всех цикловых механизмов с одной степенью свободы имеет место одно базовое условие, выполнение которого и обеспечивает минимум потерь. Рассматриваются два примера, один из которых соответствует реально работающим механизмам.
Ключевые слова: цикловой механизм, потери энергии, уравнения Эйлера, множители Лагранжа, энергетическая эффективность.
1. Введение. Одна из основных задач машиностроения состоит в повышении энергоэффективности машин. Решение этой задачи достигается различными методами: применением новых конструкционных материалов [1], снижением трения между взаимодействующими деталями отдельных узлов машин [2], снижением виброактивности механизмов, входящих в состав машины [3], снижением неравномерности хода за счет присоединения маховика [4], выбором оптимальных законов управления [5]. В работе исследуются возможные пути снижения потерь энергии в приводных двигателях за счет изменения параметров и режимов движения исполнительных цикловых механизмов.
Как правило, машина состоит из привода (управляемого двигателя того или иного типа с редуктором, обеспечивающим трансформацию крутящего момента) и механизма (возможно, переменной структуры), преобразующего движение выходного элемента привода в движение рабочего органа, непосредственно совершающего полезную работу. Обычно оптимальная с точки зрения потерь энергии работа двигателя реализуется при вполне определенной скорости движения его выходного звена, например, при определенных оборотах вала двигателя внутреннего сгорания [6]. Поэтому в представляемой работе решается задача о выборе параметров, структуры механизма и режима его движения, обеспечивающих выполнение известной полезной работы при минимуме потерь в приводном двигателе, вал которого вращается с постоянной угловой скоростью.
2. Постановка задачи. Рассматривается цикловой механизм с одной степенью свободы, движение которого описывается координатой входного звена 9. На выходное
звено действует известная полезная сила сопротивления, зависящая от положения механизма, которой соответствует обобщенная сила
Q = Q (е) (2.1)
Рассматривается режим работы двигателя с постоянной угловой скоростью
ф = ю = const, ф = Ш (2.2)
где ф — угол поворота выходного вала двигателя, ю — угловая скорость.
Практически рассматриваемый режим работы характерен для асинхронных электродвигателей, для которых на рабочей ветви характеристики при изменении нагрузки в пределах изменения оборотов от холостого хода до номинальных, угловая скорость выходного вала остается почти постоянной [7], двигателей внутреннего сгорания на регуляторной характеристике [8] и других типов двигателей, имеющих достаточную крутизну статической характеристики [9].
Между приводом и рассматриваемым цикловым механизмом устанавливается дополнительный механизм с переменным передаточным отношением
9 = 9 (<р) (2.3)
причем одному обороту входного вала дополнительного механизма соответствует один оборот ведущего звена исходного механизма.
Таким образом, введение нового механизма не изменяет траекторию и период движения рабочего органа исходного механизма, а изменяет лишь закон его движения в течение цикла. Можно выделить целый класс механизмов, для которых изменение закона движения в течение цикла допустимо при сохранении траектории и периода движения рабочего органа: механизмы подачи (бункерные питатели, конвейеры), исполнительные органы рабочих машин и орудий, подъемные и тяговые механизмы. Трением в системе механизмов пренебрегается.
3. Уравнения движения. Для рассматриваемой механической системы удобно составить уравнения Лагранжа с неопределенными множителями. Для этого выбираются координаты ф (угол поворота выходного вала привода) и 9 (угол поворота ведущего звена рассматриваемого механизма) и учитывается голономная связь (2.3). Тогда
j (е)ё + 1 ^i9 92 =х-Q (9), M-хдё = 0 (3.1)
2 дё дф
где J (9) — переменный момент инерции исходного и дополнительного механизмов, М — момент, развиваемый приводом, X — неопределенный множитель Лагранжа, Q (9) — обобщенная сила сопротивления движению.
Первое уравнение системы (3.1) описывает движение ведущего звена исходного механизма, а второе — движение выходного вала привода при допущении о постоянстве скорости вращения выходного вала двигателя (2.2). Уравнения (3.1) можно представить и в другом виде, с исключенной зависимостью инерционного коэффициента J от обобщенной координаты [10]. Исключая из первого уравнения системы (3.1) X и подставляя во второе, домноженное на ф, получаем
M<p = J (0)0 0 +1 J0 03 + Q (0)0 = T + Q (0) 0 (3.2)
T = 1/2J (9)92 (3.3)
4. Энергетический анализ. Необратимые потери мощности W (тепловые потери) для различных типов двигателей по-разному зависят от момента, развиваемого двигателем. Так, например, для электрических двигателей [7]
W = р M2 + у M + 5
(4.1)
Для двигателей внутреннего сгорания зависимость тепловых потерь от момента гораздо сложнее, но с достаточной степенью точности ее можно аппроксимировать полиномом третьей степени [5]:
W = a M3 +р M2 +yM + 5
(4.2)
где а, в, у, 8 — постоянные, характерные для конкретного двигателя с учетом передаточного числа привода.
Уравнения (4.1), (4.2) можно обобщить и поэтому в дальнейшем за основу берется:
W = X anMn, n = 0,1,... N
(4.3)
В любом случае для решения поставленной задачи требуется минимизировать функционал, зависящий от двух неизвестных функций Тф, 9(0:
т N
A = J Wdt = JX an \j + Q (6)0 ] ndt
0 0 n=0 Ф
(4.4)
при учете соотношения (3.3), рассматриваемого как уравнение связи, и дополнительного изопериметрического условия
J 0 dt = 2n
(4.5)
где т — период движения механизма.
Тогда функционал (4.4) изменяется и его можно представить в виде [11]:
т См г 1 т
н = Ц [Т + а (9)9]" (?) Т -11 (0)02 +Ц20 ¡Л = \ФсН с1«=о Ф 1 2 ] ] о
(4.6)
где an — постоянные, = ц1(?), ц2 = const — неопределенные множители Лагранжа. Из уравнений Эйлера
did®)_дФ = 0 did®)-дФ = 0
dt \dt) dT ' dt' 50/ 50
(4.7)
получаем
d_
dt
d_
dt
f ТПг \j + Q (0)0 ]n-1 Vm (t) = 0,
V n=0 Ф
f N
Z ^ \t+Q (6) 0]n-1 Q (e) - m (t) j (0) 0+Ц2
V n=0 Ф
(4.8)
- Znan \T+Q (0)0 ]n-1 « e+1 m (t) dJ^02 = 0 n=0 фп \ ] d0 ^^ d0
n=0
N
n=0
т
0
5. Определение оптимальных режимов движения. Одним из решений уравнений (4.8) при учете условий (3.3), (4.5), обеспечивающим минимум функционала (4.6), является
Т + 2 (9) 9 = С = сош^, ^ (г) = 0, = сош12
(5.1)
Такое решение гарантирует по меньшей мере локальный экстремум анализируемого функционала и обобщает результаты, полученные ранее при исследовании энергетически оптимального движения шагающих машин [12—14].
Для определения постоянной С следует проинтегрировать (5.1) и учесть периодическое изменение кинетической энергии механизма
\Тйг = \йТ = Т (т) - Т (0) = 0
(5.2)
и зависимость обобщенной силы 2 (0) только от обобщенной координаты 9,
2п
12 (9)9 йг = 12 (9)й9 = 2п2
(5.3)
где 2 — среднее значение обобщенной силы за цикл. С другой стороны,
т
[ Сйг = Ст = С —
(5.4)
Тогда с учетом (5.3), (5.4) окончательно имеет место уравнение оптимального, с точки зрения энергетической эффективности, режима движения для механизма:
Т + 2 (9) 9 = ею
(5.5)
Важно отметить, что (5.5) не зависит от характера зависимости тепловых потерь от момента (4.1)—(4.3), требуемого для осуществления полезной работы. Что касается абсолютной величины потерь, то она зависит от параметров двигателя. Для оптимального режима
т N
т N
N
N
= Ц а пИ"йг = а „2"Л = £ ап ^ = 2п X а 2
п=0
ю
ю
(5.6)
п=0
0 п=0 0 п=0
Для режима движения без изменения закона движения ведущего звена исходного механизма (отсутствия дополнительного механизма) 9 = ф = ю:
N 2п
А = У ^ Г П ю }
п=0 0
131 ю2 + 2 (9)
1_2 59 ^ .
й 9
(5.7)
Анализ показывает, что при N = 1, (5.6) и (5.7) совпадают, а при N = 2 (5.7) превышает (5.6) на величину
2п
ДА =02 Г ю 2
Т (И (0>
й 9
52 (9) = 2 (9) - 2
(5.8)
(5.9)
0
0
Фиг. 1
Из структуры (5.8) ясно, что в силу положительности подынтегральной функции величина ЛА всегда больше нуля, т.е. потери на тепловое рассеяние энергии в приводном двигателе при отсутствии передаточного механизма всегда превышают тепловые потери в случае наличия передаточного механизма между приводом и исполнительным механизмом.
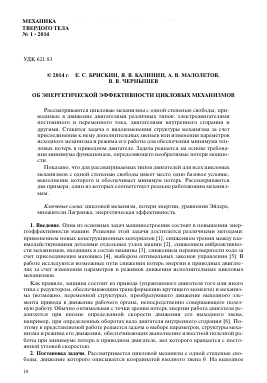
6. Примеры. Первый рассматриваемый механизм состоит из ползуна 1, массы m, к которому приложена сила полезного сопротивления F, невесомого ролика 2, обеспечивающего взаимодействие шатуна с невесомым ведущим кулачком 3, координата которого описывается функцией 0 (фиг. 1).
Ползун имеет массу m, кулачок обеспечивает его движение в соответствии с законом
х = tfsin0 (6.1)
где а — постоянная величина. К ползуну приложена полезная сила сопротивления
F = F 2 2 (6.2)
[О, П 2 3П 2
среднее значение которой равно F = F0 /2, что соответствует рабочему ходу под нагрузкой и холостому ходу ненагруженного механизма.
Тогда обобщенная сила (момент на приводном вале кулачка) имеет вид
q /0ч = fFofl cos 0, - П2 < 0 < П2, [О, П 2 < 0 < 3 П 2,
3п/ 2 л/2 (6.3)
Q = 1 J Q(0)d0 = J- ¡ F0acos0d0 = Fasin0^ = Foa 2л, 2л, л
-п/ 2 -п/ 2
Приведенный к валу кулачка момент инерции записывается следующим образом J(0) = ma2 cos2 0, dJ/d0 = -ma2 sin 20 (6.4)
Полагая, что кулачок приводится в движение двигателем постоянного тока с последовательным возбуждением (при N — 2, = 0;
Для дальнейшего прочтения статьи необходимо приобрести полный текст. Статьи высылаются в формате PDF на указанную при оплате почту. Время доставки составляет менее 10 минут. Стоимость одной статьи — 150 рублей.