МЕХАНИКА ТВЕРДОГО ТЕЛА № 1 • 2015
УДК 531.8
© 2015 г. Э. К. ЛАВРОВСКИЙ
ОБ ЭНЕРГЕТИКЕ ПОХОДОК ЧЕЛОВЕКА - ОПЕРАТОРА, ОСУЩЕСТВЛЯЕМЫХ ПРИ ПОМОЩИ АППАРАТА "ПАССИВНЫЙ" ЭКЗОСКЕЛЕТОН
Изучаются энергетические затраты и пиковые значения управляющих моментов, которые человек—оператор должен приложить в процессе перемещения экзоскелетона при различных типах регулярных, плоских, одно-опорных походок. Полученные результаты позволяют оценить эффективность использования аппарата пассивный экзоскелетон.
Ключевые слова: пассивный экзоскелетон, регулярные режимы движения, энергетические затраты, максимумы управляющих моментов.
1. Введение. Результаты фундаментальных исследований, полученные в последнее время в области биомехатроники, позволяют разработать новые классы технических устройств, "интегрированных" с биологическими организмами. Одним из таких устройств является "Экзоскелетон" (внешний скелет), дублирующий опорно-двигательный аппарат человека и существенно расширяющий его физические возможности. Известные разработки экзоскелетонов [1—4], в своем большинстве, сосредоточены на экзоскелетонах нижних конечностей. Такая биомеханическая система (человек—экзоскелетон) представляет собой неустойчивую систему с большим числом степеней свободы и соответственно управление ею представляет собой достаточно сложную проблему из области биомехатроники. В работе рассматривается модельная задача о движении "пассивной" модификации экзоскелетона вместе с человеком — оператором. Ее активный элемент способен только запирать или освобождать в некоторые моменты времени коленный сустав человека; в остальном процесс перемещения реализуется за счет мускульных усилий оператора. Исследуется вопрос о том, в какой степени такая система способна снизить нагрузку на опорно-двигательный аппарат человека при регулярной ходьбе, при переноске тяжелых грузов по ровной, горизонтальной поверхности. Основные рассматриваемые критерии это — энергозатраты на один шаг и максимальные значения управляющих моментов, прикладываемые человеком—оператором. В определенной степени данная работа является продолжением ряда исследований 70х—80х годов прошлого века [5—10], посвященных задаче моделирования ходьбы человека. Основной аппарат исследования — численный метод.
2. Постановка задачи. Работа посвящена описанию и оценке результатов математического моделирования плоской, одноопорной, регулярной ходьбы человека — оператора, на которого надет пассивный экзоскелетон, при наличии или отсутствии в "рюкзаке" дополнительного тяжелого груза. Предполагается, что ноги человека — оператора невесомы; т.е. человек имеет только весомый сосредоточенный "таз" и весомый "корпус". Все численные исследования проводились при следующих антропоморфных параметрах тела человека: вес корпуса 40 кг, вес таза 30 кг. Корпус рассматривался как однородный стержень длиной 0.8 м, длины 2а бедер и 2Ь голеней человека равны 0.45 м, т.е. его общий рост равен 1.7 метра, общая масса М = 70 кг. Центр масс
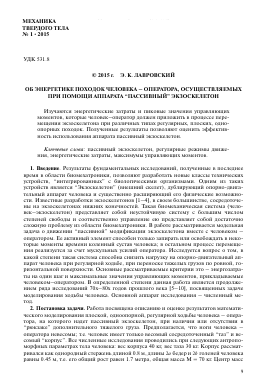
Фиг. 1
корпуса располагается в его середине, т.е. момент инерции корпуса относительно тазобедренного сустава равен J = 8.53 кгм2, а его статический момент относительно той же точки составляет кг = 16 кгм. В случае, когда оператор несет груз, считалось, что его масса равна 100 кг и он располагается в "рюкзаке" на высоте 0.8 м от той же точки таза. Экзоскелетон имеет весомый 5 кг "каркас", соединяющий рюкзак с "поясом", закрепленным на талии оператора, длиной в 0.8 м. К поясу прикреплены две металлические ноги общим весом в 10 кг; они также моделируются дополнительным сосредоточенным весом в точке таза.
Общая схема тела человека с надетым на него экзоскелетоном в процессе ходьбы по гладкой, горизонтальной поверхности представлена на фиг. 1. Аппарат опирается на горизонтальную прямую в точке Р. Вторая невесомая нога находится в переносе. Ноги крепятся к корпусу в шарнире тазобедренного сустава. Голень и бедро соединяются в коленном суставе — также плоском шарнире. Углы отклонения корпуса от вертикали у и соответственно углы отклонения бедра и голени опорной ноги от вертикали а и в показаны на фиг. 1. Декартовы координаты тазобедренного сустава будем обозначать через х и у.
Аппарат управляется моментами q, и,т соответственно в тазобедренном суставе, коленном и голеностопном. Поскольку в дальнейшем рассматривается случай пассивного экзоскелетона, то управляющие моменты q, т есть исключительно мышечные усилия человека-оператора, в то время как момент и при свободном колене есть также мышечный, а если колено запирается экзоскелетоном, то этот момент обеспечивается аппаратным способом. Систему динамических уравнений одноопорной ходьбы нетрудно получить при помощи метода Лагранжа 2-го рода; они имеют вид [7, 8]:
2
Mx - kr(ycosy - y siny) = Rx My - kr(ysiny + y cosy) = Ry - Mg
Jy - kr(xcosy + ysiny) - gkrsiny = q (2.1)
u - q + 2a(Rxcosa + Rysina) = 0 -u + m + 2a(RxcosP + Ry sinP) = 0
Здесь Rx и Ry — горизонтальная и вертикальная составляющие силы реакции в опорной ноге, g = 9.81 м/сек2 — ускорение силы тяжести. Первое уравнение в системе (2.1) описывает движение центра масс аппарата вдоль горизонтальной оси, второе — вдоль вертикальной оси. Третье уравнение описывает колебания корпуса относительно вертикали. Последние два соотношения (2.1) есть условия равновесия невесомых бедра и голени опорной ноги.
Математическое моделирование целиком опирается на приведенные выше динамические условия (2.1). Основными целями математического моделирования является ответ на следующие вопросы: в какой момент шага целесообразно запирать колено опорной ноги; какова энергетика тех или иных походок человека — оператора в экзо-скелетоне, каков возможный минимум энергетики при заданных кинематических параметрах шага; каков рисунок управляющих моментов, которые человеку необходимо приложить для осуществления тех или иных походок, и каковы максимальные значения этих моментов. Ответ на первые два вопроса дается в рамках исследования энергетических затрат человека на реализацию одного шага из последовательности шагов при периодической ходьбе. В качестве оценки этих затрат рассматривается функционал
T
W = J [|(у - а)| + |u(a - в)| + |т0|]Л (2.2)
о
В (2.2) подынтегральная функция представляет собой сумму абсолютных величин мощностей в отдельных суставах опорной ноги. Учитывается тот факт, что никакой рекуперации энергии в системе нет, мышцы человека (как сгибатели, так и разгибатели) в процессе работы все время затрачивают энергию. Человек в процессе ходьбы, в экзоскелетоне или без, по-видимому, должен стремиться минимизировать затраты энергии. Поэтому имеет смысл искать такой рисунок ходьбы, при котором затраты энергии, характеризуемые функционалом (2.2), были бы минимальными. Отметим, что при движении в режиме запертого колена величина u в подынтегральной функции (2.2), представляющая собой момент, прикладываемый человеком к механизму, равна нулю (так же, кстати, как и коэффициент при нем). Словом, данный член не влияет на значение вычисляемого интеграла W.
3. Энергетика и динамические эффекты безударных походок. При запирании коленного сустава в некоторый момент времени t = т в механической системе, описываемой системой (2.1), происходит наложение связи, которое сопровождается, вообще говоря, скачками угловых и линейных скоростей аппарата (экзоскелетона). Будем
обозначать скачки скоростей символом [•]. Обозначим через x и y- компоненты скорости тазобедренного сустава до наложения связи, т.е. при t = т - 0, а через x + и y+ компоненты скорости тазобедренного сустава после наложения связи, т.е. при
t = т + 0. Таким образом, [x] = x + - x", [y] = y + - y", [y] = y + - y-. При наложении связи реакции опоры Rx и Ry, а также моменты q, u,m превращаются в импульсные воздействия, описываемые дельта-функциями. Интенсивности этих импульсных воздей-
ствий обозначим соответственно через ERx, ERy, Eq, Eu, Em. Из динамических уравнений (2.1) вытекает следующая система соотношений, связывающих скачки скоростей с интенсивностями импульсных воздействий
M[x] - kr [у] cos у = ERx, M[y] - kr[y] sin у = ERy /[у] - К([x]cosу + [y] sin у) = Eq Eu - Eq + 2a(ERx cos a + ERy sin a) = 0 -Eu + Em + 2a(ERx cos в + ERy sin в) = 0
Скачки скоростей [x], [y], [у] для человека нежелательны. Создать импульсные воздействия в тазобедренном и голеностопном суставах также трудно. Положив Eq = 0, Em = 0, из соотношений (3.1) получим
M[x] - kr[y] cos у = ERx, M[y] - kr[y] sin y = ERy
/[y] - kr([x]cosy + [y]sin y) = 0 )
Eu + 2a(ERx cos a + ERy sin a) = 0 -Eu + 2a(ERx cos в + ERy sin в) = 0
Перепишем третье соотношение из системы (3.2) и сумму двух последних, в которой величины ERx и ERy заменены их значениями из первых двух соотношений в (3.2). Учитывая, что 2(a cosa + b cosP) = y - yp, 2(a sina + b sin в) = xp - x, где xp, yp — координаты точки опоры аппарата, окончательно получим
/[y] - kr([x]cosy + [y]siny) = 0 (3 3)
M {[x](y - yp) + [y](xp - x)} = kr [\y]{(y - yp )cos y + (xp - x)sin y}
Поскольку после наложения связи тазобедренный сустав движется по окружности с центром в точке P, то
x+(x - xp) + y+(y - yp) = 0 (3.4)
Если скорости x , y , у известны, то из системы соотношений (3.3), (3.4) можно найти значения скоростей x+, y+, у + после наложения связи.
Пусть до запирания коленного сустава (до наложения связи) имеет место соотношение, аналогичное соотношению (3.4)
x"(x - xp) + y)-(y - yp) = 0 (3.5)
Тогда из соотношений (3.4) и (3.5) имеем
[x](x - xp) + [y] (y - yp) = 0 (3.6)
Система уравнений (3.3), (3.6) состоит из трех однородных алгебраических уравнений с тремя неизвестными [х], [y], [у]. Нетрудно убедиться в том, что детерминант этой системы равен нулю только в случае, когда x = xp, y - yp = 0. Поскольку x ^ xp, y ^ yp, система имеет тривиальное решение [ x] = [ y] = [у ] = 0.
Таким образом, если в момент t = т - 0, предшествующий запиранию коленного сустава, межзвенная угловая скорость в этом суставе (3 - á = 0, то при запирании коленного сустава не происходит и скачков скоростей, т.е. нежелательное явление удара отсутствует.
Фиг.
Для дальнейшего прочтения статьи необходимо приобрести полный текст. Статьи высылаются в формате PDF на указанную при оплате почту. Время доставки составляет менее 10 минут. Стоимость одной статьи — 150 рублей.