.с \В/ У
е п / - - - -т-^^а
п/ " 'А О
X
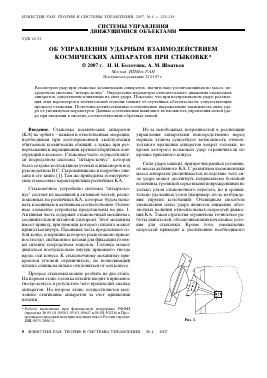
Рис. 2.
времени. Это нежелательно как само по себе, так и потому, что требует учета даже небольших по величине сил, способных придать системе заметный импульс за время стыковки. Следовательно, необходимо принимать специальные меры по ослаблению удара за счет дополнительных управляющих воздействий. Для определения таких воздействий выясним, какие параметры движения и в какой мере влияют на силу удара и какие имеются принципиальные возможности для полного устранения удара или значительного его ослабления. Этой проблеме посвящена работа. Будет показано, что сила удара угловым ограничителем стыковочного механизма активного КА о приемный конус пассивного КА существенно зависит от скорости продольного движения головки штыря в зазоре гнезда конуса после сцепки стыкуемых аппаратов. Управляя этим параметром, можно значительно уменьшить силу удара и даже полностью устранить его.
1. Расчетная схема. Рассмотрим случай, когда характерное время стягивания значительно больше типичного времени движения до первого удара.
В течение первого этапа стыковки демпфирующие устройства, расположенные в активной части и предназначенные для гашения относительных вращательных движений аппаратов, практически не работают из-за отсутствия соответствующих перемещений. Они начинают функционировать только после первого удара ограничителя о конус. Геометрические характеристики стыковочного устройства таковы, что до этого удара (как и во время его) возможно движение без появления момента сил взаи-
модействия защелок с приемным гнездом относительно головки. Упругими колебаниями аппаратов, возникшими на этапе сцепки, будем пренебрегать. Следовательно, до первого удара оба аппарата движутся как твердые тела. Поскольку в настоящее время принята концепция развития космической техники, предусматривающая последовательную сборку массивных конструкций из значительно более легких модулей, пассивный КА можно считать неподвижным в инерциальной системе координат.
Плоскопараллельная модель, используемая для расчета движения активного КА относительно пассивного, показана на рис. 2. Обозначения рис. 2 соответствуют обозначениям рис. 1. Система координат Оху связана с конусом стыковочного агрегата пассивного аппарата. Точка О помещена на дне приемного гнезда, а ось Оу направлена внутрь конуса вдоль его оси. Точка А соответствует головке штанги на рис. 1 и может перемещаться вдоль оси конуса в пределах приемного гнезда. Точка С - центр масс активного КА. В окрестности точки контакта с пассивным аппаратом ограничитель представляет собой часть усеченного конуса с осью, совпадающей с прямой АС. Точка В - середина высоты этого конуса, лежащей на его оси. Перпендикуляр к оси усеченного конуса, проведенный через точку В, пересекает образующую этого конуса е в точке D; п - нормаль к е. Через а обозначен угол между прямыми BD и е. Точка S находится на кромке приемного конуса стыковочного агрегата, где происходит ударное взаимодействие с ограничителем.
Описанная система имеет две степени свободы, которым соответствуют две обобщенные координаты: у - смещение точки А относительно точки О вдоль оси Оу и у - угол поворота активного КА относительно пассивного (угол между осью Оу и прямой АС). Произведем расчет ударного взаимодействия.
2. Оценка силы удара. Будем считать удар абсолютно упругим. Предположим, кроме того, что деформация поверхности ограничителя при этом мала, а частота упругих колебаний, возбуждаемых ударом, велика по сравнению с угловой скоростью движения активного КА. В таком случае для расчета изменения скоростей компонентов системы при ударе можно считать контактную поверхность ограничителя абсолютно жесткой и рассматривать удар как процесс, происходящий в два этапа, которые разделены бесконечно малым интервалом времени. На первом этапе ограничитель входит в контакт с кромкой приемного конуса, что может быть рассмотрено как мгновенное наложение идеальной связи на механическую систему. В результате в соответствии с теоремой Карно [2] кинетическая энергия уменьшается на величину ДГ. На втором этапе, если ДГ Ф 0, происходит мгновенный разрыв контакта с восстановлением кинетической энергии. Может оказаться, что ДГ = 0. Тогда в течение неко-
торого времени поверхность ограничителя будет скользить по кромке приемного конуса.
Зная ДГ, можно оценить максимальную величину силы удара ограничителя о кромку конуса. Потеря кинетической энергии на первом этапе удара происходит из-за возрастания потенциальной энергии упругого взаимодействия ограничителя с конусом. Будем считать силу контактного взаимодействия F пропорциональной деформации ограничителя т. е.
F = (2.1)
где к - коэффициент, характеризующий жесткость контакта. Потенциальная энергия этой силы задается соотношением
П = ¡k?.
(2.2)
Исходя из равенства АГ = П получим максимальную деформацию
2ААТ
k '
(2.3)
Подставляя ^тах вместо ^ в соотношение (2.1), найдем максимальную силу удара
^тах = ДкДДг. (2.4)
Таким образом, для оценки максимальной силы ударного взаимодействия достаточно рассмотреть только первый этап этого процесса в соответствии с описанной моделью.
3. Изменение кинетической энергии при наложении идеальной связи. Приведем вывод формулы для изменения кинетической энергии произвольной механической системы с конечным числом степеней свободы при внезапном наложении идеальной связи (см., например, [2]).
Пусть система имеет п степеней свободы, соответствующих вектору обобщенных координат q = = ..., qn)т, где символ т означает транспонирование. Уравнение движения такой системы имеет вид
А(X)4 + У(X) = 2(X). (3.1)
Здесь А^, X) - симметричная положительно-определенная п х п -матрица кинетической энергии, V(q, 4, X) - п-вектор обобщенных сил инерции, Q(q, 4, X) - п-вектор активных обобщенных сил, действующих на систему. Величины А^, X), V(q, 4, X) и Q(q, ¿1, X) предполагаются непрерывными функциями своих переменных.
Исходим из того, что в момент времени х0 на систему налагается связь
B(q, t)q + G(q, t) = 0,
(3.2)
что m < n, т. е. число связей меньше числа степеней свободы исходной системы, и ранг матрицы B(q, X) равен m, т. е. строки этой матрицы линейно независимы. Начиная с момента времени х0 + 0 движение системы удовлетворяет уравнению связи (3.2) и уравнению движения
A(q, t)q + V(q, q, t) = Q(q, q, t) + R, (3.3)
где R - обобщенная сила реакции связи.
В момент наложения связи мгновенно изменяются обобщенные скорости системы, а обобщенные координаты остаются неизменными. Обозначим через q0 и q0 значения переменных q и q в момент х0 - 0 непосредственно перед наложением связи. Пусть А q - изменение вектора обобщенных скоростей в результате наложения связи, т. е.
¿i (to + 0) = ¿o + А q. (3.4)
Поскольку в момент времени х0 + 0 обобщенные координаты и скорости удовлетворяют уравнению (3.2), имеем
Boqo + Bo А q + Go = 0, (3.5)
где B0 = B(q0, X0) и G0 = G(q0, X0).
Скалярное произведение двух векторов будем записывать с помощью угловых скобок <•, •}. По определению идеальной связи работа сил реакции равна нулю на любой совокупности виртуальных перемещений, допускаемых связью, т. е.
<R, 5q} = 0 (3.6)
для любого вектора 5q, удовлетворяющего системе линейных однородных уравнений
B(q, t)8q = 0. (3.7)
Пространство строк матрицы B(q, X) является ортогональным дополнением пространства решений системы уравнений (3.7). Поэтому
R = BT(q, t)X, (3.8)
где X - m-вектор, зависящий от обобщенных координат, скоростей и времени.
Проинтегрируем уравнение (3.3) с учетом (3.8) по времени от х0 - £ до х0 + £ и устремим положительный параметр £ к нулю. Так как q и ¿i - конечные величины, а функции A(q, х), V(q, ¿i , х), Q(q, ¿i , х) и B(q, х) непрерывны, получаем
A0Аq = BTA, Л = lim [ Xdt,
е^o J
(3.9)
где А0 = А^0, х0). Решив последнее уравнение относительно Д ¿1, найдем
где B(q, х) - m X n-матрица, а G(q, х) - m-вектор. Функции B(q, х) и G(q, х) непрерывны. Полагаем,
— 1 T
А<1 = A0 B0 Л.
(3.10)
t„ + е
и - е
Подставим это выражение в (3.5) и получим
Во АО1 Л = - Во 4о- во, (3.11)
откуда следует
Л = -( Во А-1 Вт0 )-1( Во до + во). (3.12)
Подставляя выражение (3.12) в правую часть (3.10) вместо Л, приходим к окончательному выражению для изменения обобщенных скоростей в результате наложения связи
A q = -A-1 Bq (B0 A-1 Bq )-1( Bo qo + ^).
(3.13)
AT = 2 <qo, Aoqo) --22 <( qo + Aq), Ao (qo + Aq)).
(3.14)
Если G0 = 0, то соотношение (3.14) с учетом (3.13) можно преобразовать к виду
A T = 1 <Aq, Ao Aq).
(3.15)
f(q, t)> o,
(4.1)
I
j = i
df (q, t)q
3q, q
+ fq , t ) = o Э t '
(4.2)
полученное дифференцированием тождества t) = 0. Уравнение (4.2) аналогично (3.2). В рассматриваемом случае, когда связь одна, матрица В^, ¿) -вектор-строка
B (q, t) =
fq, t) 3f (q, t)-
dqi
а вектор G(g, 0 - скаляр
dq„
G( q, t) = ^.
(4.3)
(4.4)
В теории удара вектор Д С называется вектором потерянных скоростей вследствие мгновенного наложения идеальной связи (3.2) на систему (3.1).
Зная Дс, определим уменьшение кинетической энергии системы
Напишем соотношения (3.13) и (3.15) для модели активного КА, изображенной на рис. 2. Тогда
q
у
L^J
Кинетическая энергия аппарата
1 2 1 2
T = 2^у +2JA¥ -Mbyvj/sinу,
(4.5)
(4.6)
где М - масса активного аппарата, JA - его момент инерции относительно оси, проходящей через точку А перпендикулярно плоскости ху, Ь - расстояние от точки А до центра масс аппарата. Этой квадратичной форме соответствует матрица
A (у) =
ГМ
-Mb sin у-
_-Mbsin у JA
(4.7)
Правая часть последнего равенства в теории удара известна как энергия потерянных скоростей. Соотношение (3.15) выражает теорему Карно: кинетическая энергия, потерянная в результате мгновенного наложения стационарной идеальной связи на механическую систему, равна энергии потерянных скоростей.
4. Применение формулы для расчета изменения кинетической энергии к рассматриваемой модели. При выводе (3.13) использовалось уравнение связи в дифференциальной форме (3.2). Однако для механических систем, в которых происходят удары, характерны геометрические связи
Для дальнейшего прочтения статьи необходимо приобрести полный текст. Статьи высылаются в формате PDF на указанную при оплате почту. Время доставки составляет менее 10 минут. Стоимость одной статьи — 150 рублей.