МЕХАНИКА ТВЕРДОГО ТЕЛА № 2 • 2014
УДК 531.36
© 2014 г. Т. Е. ЧУРКИНА
ОБ УСТОЙЧИВОСТИ ВРАЩЕНИЙ СПУТНИКА ПРИ РЕЗОНАНСЕ МЕРКУРИАНСКОГО ТИПА
Рассматривается плоское движение спутника относительно центра масс в центральном ньютоновском гравитационном поле на эллиптической орбите, описываемое дифференциальным уравнением второго порядка, называемым уравнением Белецкого. В рамках плоской задачи (в предположении, что тело совершает колебания в плоскости невозмущенной орбиты) существует семейство периодических решений уравнения Белецкого вблизи резонанса 3:2 между периодами орбитального обращения и осевого вращения соответственно. В работе проведен нелинейный анализ устойчивости данных периодических решений. Исследование проведено как при наличии резонансов третьего или четвертого порядков, так и при их отсутствии, а также на границах областей устойчивости в первом приближении. Задача решена численно. При фиксированных значениях параметров (эксцентриситета орбиты центра масс и инерционного параметра) при помощи процедуры построения симплектического отображения положения равновесия на себя подсчитаны коэффициенты производящей функции отображения, по которым сделаны выводы об устойчивости или неустойчивости положения равновесия.
Ключевые слова: спутник, уравнение Белецкого, устойчивость, гамильтониан, производящая функция, резонанс.
1. Постановка задачи. Рассмотрим движение спутника — твердого тела относительно центра масс в центральном ньютоновском гравитационном поле. Характерные размеры спутника предполагаем малыми по сравнению с размерами орбиты. Орбита центра масс спутника является эллиптической [1].
Пусть O — центр масс спутника, (OXYZ) — орбитальная система координат, при этом ось OZ направлена по прямой, соединяющей притягивающий центр и центр масс O спутника, OX — по трансверсали, OY — по бинормали к орбите. Введем систему координат (Oxyz), жестко связанную со спутником, оси которой направлены вдоль его главных центральных осей инерции. Будем задавать ориентацию спутника в орбитальной системе координат при помощи углов Эйлера у, 0, ф (у — угол прецессии, 0 — угол нутации, ф — угол собственного вращения).
Рассмотрим плоские движения спутника на эллиптической орбите. При таком движении главная ось инерции Oz спутника во все время движения перпендикулярна плоскости орбиты центра масс, а изменение угла ф описывается дифференциальным уравнением второго порядка (часто называемым уравнением Белецкого) [2]:
л , \d2m , . dф , , . 3(A - B) .. 1Ч
(1 + ecos V)—-2 - 2esin v — + nsinфcosф = 2esin v, n = —---(1.1)
dv d v C
Здесь A, B и C — моменты инерции спутника относительно осей Ox, Oy, Oz соответственно, e — эксцентриситет орбиты (0 < e < 1), v — истинная аномалия. Параметр n, входящий в уравнение (1.1), ограничен (-3 < n < 3), поскольку главные центральные моменты инерции A, B, C удовлетворяют неравенствам треугольника.
Будем интересоваться резонансными периодическими движениями спутника мер-курианского типа, когда за время, равное двум периодам обращения по орбите, спутник в абсолютном пространстве совершает три оборота вокруг нормали к плоскости орбиты (резонанс 3:2).
Меркурианский тип движения спутника характеризуется еще следующим условием: при прохождении перицентра орбиты одна из главных центральных осей инерции спутника совпадает с радиус-вектором, а при прохождении апоцентра она же перпендикулярна радиус-вектору (так называемый эффект "отслеживания" перицентриче-ского радиус-вектора орбиты). Согласно [3], чтобы эффект отслеживания имел место, необходимо существование функции x(v) с периодом 4п, для которой
(1 + e cos v)x "- 2e sin vx'+ n sin(x + v) = 6e sin v (1.2)
x(0) = 0, x(4n) = 0, x = 2ф - v (1.3)
Краевая задача (1.2), (1.3) не имеет аналитического решения и численно решена в [3]. В [3] показано, что решением краевой задачи (1.2), (1.3) могут служить 2п-периодиче-ские и "чистые" 4п-периодические решения. Для 2п-периодических решений краевые условия в задаче (1.2), (1.3) могут быть заменены на условия
x(0) = x(n) = 0 (1.4)
Основной целью данной работы является решение задачи об устойчивости 2п-пе-риодических решений, найденных в [3], в строгой нелинейной постановке. Отметим, что аналогичная задача, но для случая фиксированного значения эксцентриситета e = 0.2056, соответствующего орбите Меркурия, рассмотрена в работе [4].
2. Изложение метода. Положим
2
x = x + q, p = (1 + e cos v) dq/dv
Тогда возмущенное движение описывается системой дифференциальных уравнений с функцией Гамильтона
1 2
H(q, P,v) = 1-p-2 -
2 (1 + e cos v)
- n(1 + e cos v) [cos(x + v + q) - cos(x + v) + q sin(x + v)]
где x = x(v) — решение краевой задачи (1.2), (1.4).
Гамильтониан H(q, p, v) представим в виде ряда по степеням q и p:
H(q, p, v) = H2(q, p, v) + ^(q, p, v) + ^(q, p, v) + ...
1 2 1 2
H2(q, p, v) =--p-j + - n(1 + e cos v) cos(x + v)q2
2(1 + e cos v) 2
i 3
H3(q, p,v) = — n(1 + e cos v)sin(xx + v)q3
6
H4(q, p,v) = ——n(1 + e cos v)cos(x + v)q4
24
Для решения задачи об устойчивости решений воспользуемся методом отображений, предложенным в [5].
Пусть Х^) — фундаментальная матрица решений линеаризованных уравнений движения. Ее элементы х^) удовлетворяют системе дифференциальных уравнений:
] = дН2(хХ}, х1} ,у) йх2 ] = дНг(х\], х1} ,у) = й\ 5х2у- й\ 5х1у-
с начальными условиями х11(0) = х22(0) = 1, х12(0) = х21(0) = 0, которая должна рассматриваться совместно с краевой задачей (1.2), (1.4).
Характеристическое уравнение линеаризованной системы с гамильтонианом H2 имеет вид
р2 - 2ар + 1 = 0, а = (х11(2п) + х22(2п))/2
Если |а| < 1, то периодическое решение устойчиво в линейном приближении [6].
Следуя [5], сделаем каноническую унивалентную замену переменных по формулам
Ч = хп(^ + хп^)П, Р = х21^ + х22^)п
После этой замены задача сводится к нахождению и анализу отображения п0} ^ ^ за период изменения независимой переменной V от 0 до 2п.
Разложение нового гамильтониана п, V) в ряд не содержит членов второй степени относительно £, п:
Г = Гз(^, п, V) + Г4&п^) + ...
Будем искать не само отображение, а его производящую функцию, которая удовлетворяет уравнению Гамильтона—Якоби
дФ/^ + ЩьдФ/д^) = 0 дФз(5ьП0,У).
dv
■ = -r3(^i,no,v)
дФ4(^1, По, v) = (^ n v) - dr3(^i,no,v) Ф3(5ьПо^) dv 5n0
Функции Ф3, Ф4 могут быть получены в виде многочленов
Ф^i,no,v) = X Ф^о^По (k = 3,4)
Явный вид уравнений для коэффициентов форм Ф3, Ф4 таков:
dA30(v) 1 . W1 ч 3 , ч
= - n sm(;c + v)(1 + e cos v)xn(v) dv 6
dA03(v) 1 . W1 ч 3 . ч
= - n sin(x + v)(1 + e cos v)x12(v) dv 6
d^12(v) = 1 n sin(x + v)(1 + e cos v)x11(v)x122(v) dv 2
d^21(v) = 1 n sin(x + v)(1 + e cos v)x121(v)x12(v) dv 2
d ф 4o(v) d v
2/1 23 \
= n(1 + e cos v)xn(v) | —cos(x + v)xn(v) + ^sln(x + v)Xl2(v)фзo(v)j
= n(1 + e cos v)Xi2(v) (:1 C0s(.x + v)xu(v) + 1 sin(^ + у)ф12(у) dv \24 2
d^13(v) = n(1 + e cos v)x22(v) (-cos(x + v)xn(v)x12(v) + dv \6
+ sin(^ + v)(xn(v^l2(v) + xi2(v)hi(v))
d^3l(v) = n(1 + e cos v)x21(v)x12(v) (2 cos(x + v)x222(v) + dv \6
+ sin(x + V)(3x12 (у)фз° (v) + Xll(v)ф2l(v))
d^22(v) = n(1 + e cos v)x12(v) I1 cos(x + v)x22(v)x12(v) + dv \4
/3 2 1 2
+ sin(x + V) I ^ Xl2(v)фз°(v) + 2Xll(v)Xl2(v)ф2l(v) + ^ Xll(v)фl2(v)
Полученная система обыкновенных дифференциальных уравнений с нулевыми начальными условиями, объединенная с уравнениями и начальными условиями для элементов матрицы X(v), позволяет найти коэффициенты производящей функции отображения.
Введем обозначение Sk = Sk(q°, p°) = Фk(q°, p°, 2n) (k = 3,4). Тогда искомое отображение {q°, p°} ^ {q1, p2} записывается в виде
= X(2n)
dS3 д2S3 dS3 dS4 _
q°--3 +-3--3--4 + O4
dp° dp°dq° dp° dp°
p° +dSi-d^SidSi + dSi+о4
dq° dq°2 dp° dq°
Здесь O4 — совокупность членов не ниже четвертой степени относительно q0, p0. Следуя [5], сделаем каноническое преобразование
д = нп0 + пиР, р = и21е + П22Р
(2.1)
приводящее матрицу Х(2п) линеаризованного отображения {д0, р0} ^ {д1, р1} к нормальной форме. После замены (2.1) отображение принимает следующую форму:
Ql
= G
-Щ + -BE, + о
dP° dP°dQ° dP° dP °
p + ЗРз - д F дРз + dpL+O
. ° dQ° dQ° dP° dQ° 4
Здесь F3, F4 выражены через S3, S4 по формулам
F3 = cS3(nnQ° + nnP°, n2lQ° + n22P°) = X AQ Po F4 = CS4 (nl lQ° + nnP°, n2lQ° + n22P°) + A = £ A^QoPq
-2
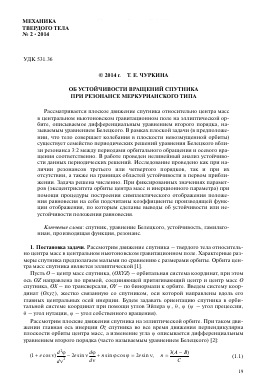
0.8= 2^ е
a = 1 \Э a = -1
Фиг. 1
Д = ■
2
зес
Г 0 д*3 + (д^з И12«22| Т7Т I - 2И12«21 —~7 + ПцЩА —3
дбс д^с
дРс
2Л
в которых с = 1/(яцИ22 — ^12^21) — валентность преобразования (2.1), матрица G — нормальная форма матрицы линеаризованного отображения (ее явный вид, меняющийся в зависимости от значения а и структуры матрицы фундаментальных решений Х(2п), приведен в [5]).
По значениям коэффициентов форм Г3, можно сделать вывод об устойчивости или неустойчивости движения [5].
3. Изложение результатов. На фиг. 1 в плоскости е, п приведены результаты исследования устойчивости в первом (линейном) приближении, полученные в [3, 7]. Области устойчивости в первом приближении заштрихованы и для удобства пронумерованы от 1 до 3. При проведении расчетов внутри области устойчивости в первом приближении, а также на границах будем считать, что е < 0.9. Отметим, что при значениях е > 0.9 решения краевой задачи (1.2) также существуют, а при - 3 < п < -1.5 даже имеет место "сборка" в ее решении (см. [8]), которая в данной работе не рассматривается (под термином "сборка" будем понимать, такой случай в решении краевой задачи (1.2) с фиксированными значениями параметров е, п, когда начальные условия могут быть определены не единственным образом).
Каждой паре значений параметров е, п, принадлежащей области устойчивости в первом приближении, приведенной на фиг. 1, отвечает одно решение краевой задачи (1.2). Исключение составляют решения попадающие в "сборку" вблизи точки е = С. 3,
2
1
0
1
1
Фиг. 2
п = 1.3. Для них решений краевой задачи существует три, из которых только два попадают в область устойчивости в первом приближении [3].
Случай 1. Пусть a = 1. На фиг. 1 соответствующие границы области устойчивости в первом приближении подписаны. Отметим, что при п = 0 значение a при любом значен
Для дальнейшего прочтения статьи необходимо приобрести полный текст. Статьи высылаются в формате PDF на указанную при оплате почту. Время доставки составляет менее 10 минут. Стоимость одной статьи — 150 рублей.