ИЗВЕСТИЯ РАН. ТЕОРИЯ И СИСТЕМЫ УПРАВЛЕНИЯ, 2015, № 4, с. 94-110
СИСТЕМЫ УПРАВЛЕНИЯ ДВИЖУЩИМИСЯ ОБЪЕКТАМИ
УДК 629.197
ОБОСНОВАНИЕ МЕТОДОВ ОПТИМАЛЬНОГО ОЦЕНИВАНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ЦЕЛИ В ТРИАНГУЛЯЦИОННОЙ ИЗМЕРИТЕЛЬНОЙ СИСТЕМЕ
© 2015 г. В. Ю. Булычев, Ю. Г. Булычев, С. С. Ивакина, И. Г. Насенков, П. И. Николас, Е. Н. Чепель
Ростов-на-Дону, ОАО "Всероссийский научно-исследовательский институт "Градиент", Москва, ОАО "Концерн Радиоэлектронные технологии" Поступила в редакцию 08.11.13 г., после доработки 23.04.14 г.
Для триангуляционной измерительной системы приводятся альтернативные методы оценивания параметров движения цели на базе различных критериев оптимальности. Обсуждаются геометрический смысл, достоинства и недостатки данных методов, даются рекомендации по их практическому применению в зависимости от условий наблюдения цели, топологии системы и предъявляемых к ней требований. Приводятся результаты моделирования.
Б01: 10.7868/80002338815010047
Введение. Анализ показывает, что интерес к проблемам теории и практики построения эффективных триангуляционных измерительных систем (ТИС) гражданского и военного назначения не ослабевает и по настоящее время [1—12]. Известно, что решение задач первичной и вторичной обработки измерений в системах пассивной локации, к которым принадлежит ТИС, значительно сложнее аналогичных задач, решаемых в активных системах. Применительно к задаче оценивания параметров движения цели это проявляется в следующем: сама задача существенно нелинейна; данная нелинейность приводит к итерационным процедурам и, как следствие, к проблеме выбора достаточно "хорошего" начального условия; наличие итерационности зачастую сопровождается плохой сходимостью алгоритмов, накоплению ошибок округления и др., при этом снижается возможность обработки измерений в реальном времени. Традиционно привлекаемый метод максимального правдоподобия (ММП) ориентирован на знание закона распределения ошибок пеленгования; известный подход к реализации ММП в линейной постановке требует привлечения априорной информации об ориентировочных дальностях от пеленгаторов ТИС до цели, что является достаточно жестким ограничением для практики. Известные работы в основном ограничиваются решением статической задачи оценивания местоположения цели, однако не менее актуальна и динамическая задача, связанная с учетом модели движения. Слабо отражен вопрос оптимального оценивания в условиях асинхронных измерений, когда моменты радиоконтактов различных пеленгаторов ТИС могут не совпадать.
Даже этот неполный список проблем показывает необходимость появления публикаций, в которых бы рассматривались и обсуждались альтернативные методы оптимального оценивания параметров движения целей в ТИС. Это позволило бы разработчикам систем выбирать адекватный метод оценивания с учетом топологии, структуры и задач, решаемых ТИС, а также условий наблюдения цели. Предлагаемая статья посвящена именно этому направлению.
При наличии нескольких целей (в этом случае априорное предположение о наличии только одной цели несправедливо), когда задача не сводится к нескольким одноцелевым задачам, определение параметров движения цели существенно усложняется:
каждый замер от любого пеленгатора необходимо ассоциировать с определенной целью с учетом нескольких вариантов ассоциации;
необходимо учитывать разный темп поступления информации по каждой цели при решении задачи ассоциации.
Подход к решению этих проблем конструктивно описан в [13].
1. Постановка задачи. В общей декартовой системе координат ХХ2 рассматривается ТИС, состоящая из пеленгаторов Пт, т = 1, М, с каждым из которых связана местная система координат
Z Z r : ЛВ^ Ц /rm /" v d p
e 0 "P —"
pm.... --"""":
/0\ / ^ч Pm V/e0 m // x'" p m ßm Y
/■ о 'ß m a0 m m > —П
X am
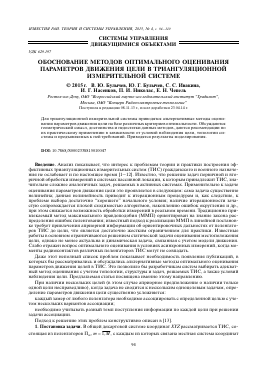
Рис. 1. Геометрия задачи
XmYmZm. В системе XYZ истинное положение цели (Ц) задается вектором r0 = R°е0 = [x0,y0,г0]T, где R — наклонная дальность, ||е 0|| = 1, а положение Пт — вектором рm = [рm, pm, pm]t. Тогда в системе XmYmZm положение Ц задается вектором (см. рис. 1) 4° = ?0 - рm = [x0 - pm,У° - рI,г0 - pm]t = = R-lem, где R°m — местная наклонная дальность, ЦеЦЦ = 1, а линия визирования (ЛВ) ЛВm наблюдаемой Ц характеризуется пеленгами: азимутом a°m и углом места р°m. Здесь и в дальнейшем символ 0 подчеркивает, что речь идет о точных исходных данных, а символ ~ характеризует реальные измерения с учетом ошибок пеленгования.
На каждом П m выполняются измерения
a m = а 0m + Да m, ¡3 m = P°m + Ар m, где ДаЦ, Apm — истинные ошибки пеленгования, при этом ЛВ1 задается направляющим вектором
4 = [cos am cos рm,sin аm COS ¡3m,sin ¡3m]T. Воспользуемся общим уравнением наблюдений ТИС: h0 = у0 + Ay , где
^ 0 0ч t ~0 чтпт ^0 г 0 о0 пт ТТ7
Y= [(Yi) , ..., (Y m) ] , Y m = [a m,Pm] , Ш = 1,M — вектор истинных пеленгов Ц,
Af = [(AYi)J,..., (ДуM)t]t, Дуm = [Aa°m, Aß0m]T, m = 1,M
— вектор истинных ошибок пеленгования, h0 = [a 1,p 1,..., aM,pM]t — вектор реальных измерений. Ошибки являются случайными и характеризуются некоторым законом распределения вероятности f (Ду), где Ay = [Aam, Aßm]t , m = 1, M, при этом ошибки любых двух пеленгаторов, как правило, полагаются некоррелированными. Последнее позволяет задать общий закон распределения для всех ошибок ТИС:
M
f () = П fm (Äym ),
m = 1
где ÄYm = [A«m, Aßm]t.
Выберем некоторую текущую точку P (см. рис. 1), определяемую вектором F = [х,y,z] в системе XYZ и вектором rm = г - рm в системе XmYmZm. Здесь F = Re (где ||е|| = 1) и rm = Rmem (где
||ет|| = 1). Точка Р = Р (х, у, г) будет соответствовать некоторой оценке местоположения Ц, согласно используемому методу оценивания.
Ниже рассматриваются два случая: статический — движение Ц не учитывается; динамический — учитывается движение Ц в виде модели
x(?) = лт4(?), у(?) = Bтq(?), г(0 = Стд(О, (1.1)
где Л = \ак ] , В = \Ьк] , С = \ск ] , к = 0, К - 1 — неизвестные векторные коэффициенты,
д (?) = [дк (?)]т, к = 0, К -1, — вектор базисных функций (например, дк (?) = ?к для степенного базиса). Данная модель широко используется на практике, особенно на участке маневра Ц [14].
Чтобы учесть динамику Ц, для каждого Пт вводится временная сетка ?тп, при этом ЛВтп для
всех П т и всех ?тп(т = 1, М, п = 1, Ит) характеризуются направляющими векторами
L = [cos аmn cos ßmn,sin amn cosßmB,sin ßmn]T, (1.2)
где
~ + A ° R -R° + AR °
а mn — а mn + Aa mn, P mn — Pmn + AP mn'
аmn _ а (tmn)' ßmn = ß (tmn)'
Aa0mn = Aa° (m), Aßmn = Aß0 (m). Введение такой сетки соответствует общему случаю, когда моменты радиоконтактов Пт, m = 1, M, с Ц могут быть произвольными, т.е. рассматривается асинхронная ТИС.
Ставится задача рассмотрения и обоснования альтернативных методов оценивания местоположения и параметров движения Ц в статической и динамической постановках для различных критериев оптимальности. Требуется показать геометрический смысл, достоинства и недостатки этих методов, выработать рекомендации по их применению на практике с учетом принимаемых ограничений и условий наблюдения Ц.
2. Нелинейная максимально правдоподобная оценка. Сначала ограничимся статической постановкой. Пусть Ду есть оценка вектора Ду , согласно некоторому методу (по аналогии с [1]): Ду = Ду (h °, г), где r — оценка вектора г°. Это позволяет записать функцию правдоподобия в виде
P(h /Г) = /(Д#°, Г)), (2.1)
где символ / соответствует выполнению некоторого условия.
С учетом (2.1) получим максимально правдоподобную оценку:
r* = y*,¿*]t = arg max/(Ay(h°,r)). (2.2)
r
Поскольку зависимость Ay(h°,r) нелинейна по г, то нелинейной является и сама оценка F*. Следовательно, реализация ММП (2.2) сопряжена с выбором некоторой итерационной процедуры и заданием "хорошего" начального условия. Именно в этом и состоит основной недостаток нелинейного ММП (2.2), который ограничивает его применение на практике. Другой недостаток состоит в невозможности реализации итерационной процедуры в реальном времени.
Если ограничиться нормальным законом распределения ошибок пеленгования и их независимостью для разных пеленгаторов, то оценка (2.2) будет выглядеть так:
r* = arg max
ПNexp\-2 Z AYlh°,Ъ)CmAym(h°,r)j
m = 1 ^ m = 1 J
= arg min Z AY m (ъ r )Cm AY m (ъ r )
M
-T
(2.3)
m
где |Ст| — определитель квадратной матрицы Ст второго порядка, обратной по отношению к корреляционной матрице Кт ошибок измерений пеленгатора Пт. Оценка (2.3) также является нелинейной, плохо реализуемой на практике в реальном времени.
Для динамического случая необходимо использовать вектор наблюдений
^ 0 г- ~~ _ _ _ _ -|т
Нн = I аП,Рша 12,Рl2, а 1Н1, , аМ1,РМ1,аМ2, вМ2, •••, аМНМ, Рмнм] , (2.4)
где атп = а (т),втп = в (?тп), т = 1, М, п = 1, Жт. При этом Нн = ун + АуN, функция правдоподобия имеет вид
Р (НН/Б) = / (£?н (Н°ю Б)), (2.5)
—► —► T —► T —► t t
где D = [(A) ,(B) ,(C) ] . Соответствующая нелинейная оценка истинного вектора параметров
—- 0 —- 0 t —- 0 T —- 0 T T
D = [(A )T,(B )T,(C )T]T движения Ц находится по правилу
D* = [(A*)T,(B*)T,(C*)T]T = arg max f (Д^N(h0N,D)). (2.6)
D
Оценивание (2.2) и (2.6) на базе метода ММП сопряжено еще с одним серьезным недостатком — необходимо знать закон распределения ошибок пеленгования для ТИС. Свободен от этого недостатка метод наименьших квадратов (МНК) [8, 14, 15].
3. Нелинейная МНК-оценка. Для статического случая сформируем квадратичную форму
F(r) = \h° -h(г)]' W\h° -h(?)], (3.1)
где W — весовая матрица, h (r) — вектор, описывающий функциональную зависимость измеряемых и оцениваемых параметров.
За нелинейную МНК-оценку г* искомого вектора г0 принимается та, которая обеспечивает минимум (3.1). Условие минимума (3.1) записывается в виде
HTW\h0 - h (?*)] = 0, (3.2)
где
H = dh (r*) ßr*, h (r*) = \hm (r*)]T = [аm (?*), ßm (/**)]', m = 1M, am (rf*) = arccos (x* -pm)\\г*т\Г\ ßm(r**) = arcsin (z* -pm)l|rm*l|-1, >!*»=[x* - pm, y* - pm]rm* = [** - pm, y* - pm, z* - pm]T.
Система нормальных уравнений (3.2) решается итерационными методами, при этом необходимо, чтобы матрица H содержала хотя бы один минор порядка 3 с определителем, отличным от нуля [14].
Для дальнейшего прочтения статьи необходимо приобрести полный текст. Статьи высылаются в формате PDF на указанную при оплате почту. Время доставки составляет менее 10 минут. Стоимость одной статьи — 150 рублей.