БИОФИЗИКА СЛОЖНЫХ СИСТЕМ
УДК 595.62; 591.171
ОСОБЕННОСТИ ЛОКОМОЦИИ МНОГОНОЖКИ Scolopendra cingulata
ПР И ИЗМЕНЕНИИ СКОР ОСТИ
© 2009 г. А.Л. Карпович
Институт проблем передачи информации им. А .А. Xаркевича РАН, 127994, Москва,
ГСП - 4, Бол. Каретный пер., 19 E-mail: кагроу1ск@и1р.гы
Поступила в p едакцию 24.03.08 г. После доработки 24.06.08 г.
И сследованы особенности пр о стр анственно-вр еменных параметр ов движения ног сколопендр ы после мгновенного изменения скорости локомоции с V1 на V2, V2 Ф V1. Показано, что: 1) синергия ходьбы «след в след» сохраняется при изменении скорости локомоции; 2) непрерывность метахрональных волн при смене скорости не нарушается; 3) множество всех ног сколопендр ы в течение некоторого времени после изменения скор о сти пер едвижения делится на две группы: группу (а) - передние ноги, создающие «новую» следовую дор ожку с длиной шага ¿2 и группу (б) - задние ноги, все еще идущие по «старой» следовой дорожке с длиной шага ¿i; ¿1 Ф ¿2. Передние ноги шагают в стационарном, а задние - в переходном режиме. Значения параметров шагания в группах (а) и (б) различаются. Постепенно, со скоростью метахрональной волны, ноги группы (а) перестр аивают работу ног группы (б) из пер еходного режима в стационарный.
Ключевые слова: многоножка, сколопендра, локомоция, кинематика, изменение скорости, нестационарный режим локомоции.
В работе предпринята попытка проанали-зир овать один из видов нестационар ной локомоции многоножки ^со\орвпйта с1щыШа (Муп-ароёа, СЫ1ороёа), а именно: однокр атное мгновенное (в реально сти - «быстрое») изменение скорости локомоции и его влияние на про-стр анственно-вр еменные хар актеристики движения отдельных ипсилатеральных конечностей (ИК), а также их взаимную метахрональную координацию.
К сожалению, в большинстве экспериментальных исследований регистрации пробежек животных пр едставляют собой неконтролир уе-мый конгломерат самых разных видов нестационарной локомоции.* По мнению автор а основой любой локомоции является стационарная локомоция. Под стационарной локомоцией следует понимать передвижение: 1) по прямой, 2) с некоторой постоянной скоростью, 3) по ровной горизонтальной поверхности, 4) при отсутствии проскальзывания конечностей по «грунту», 5) когда параметры движения всех
Сокращения: ИК - ипсилатеральные конечности, МВ -метахрональная волна, СД - следовая дорожка, ТОН -точка основания ноги, ДТН - дистальная точка ноги.
конечностей одинаковы, 6) когда скорость метахр оналъных волн (МВ) [1] постоянна, 7) когда это «продолжение» локомоции, а не ее инициация или завершение и т.п. П риведенный перечень не полон. Локомоцию следует считать нестационарной при несоблюдении любого из условий стационарности. Все (или почти все) режимы нестационарной локомоции следует рассматривать как модификации стационарной локомоции текущими командами типа: «изменить скорость движения», «повернуть», «остановиться» т.п.. Именно наслоение на стационарную локомоцию дополнительных условий ходьбы превращает ее в нестационарную с измененными характеристиками движения отдельных ног и/или их взаимной координации. В режиме нестационарности (как и стационарности) могут передвигаться как все имеющиеся ноги, так и некоторая ограниченная их группа. Любая нестационарность движения вносит свой (часто существенный) вклад в экспериментально регистрируемый разброс значений кинематических параметров локомоции, тогда как при стационар ной локомоции р азброс параметр ов минимален [2].
*Термины локомоция, ходьба, бег используются в данной работе как синонимы слова «передвижение».
СВОИСТВА СТАЦИОНАРНОМ ЛОКОМОЦИИ С КОЛОПЕНДРЫ И ПАРАМЕТРЫ ЕЕ ОПИСАНИЯ
П р ежде чем описывать нестационарную ходьбу, необходимо ввести кинематические параметры описания стационар ной локомоции сколопендры. Те же самые параметры будут использоваться и для описания переходного режима нестационарной ходьбы. Сведения о количественных закономерностях «нормальной» (близкой к стационарной) локомоции сколопендр ы имеются в работах [2-6]. Рассматривается локомоция вперед. Предполагается, что проскальзывание ног по грунту отсутствует. Напомним основные свойства локомоции сколопендры. Главным о рганизующим принципом локомоции этой многоножки является ходьба «след в след» конечностями каждого ипсилате-рального ряда. Это означает, что в каждый след, «отпечатанный на грунте» передней ногой, последовательно наступают все последующие ипсилатеральные конечности вплоть до самой задней. Иными словами, передние конечности находятся в привилегированном положении, именно они формируют цепочку следов - следовую дорожку (СД). Назовем эти конечности «ведущими». Все «о стальные» ИК шагают, наступая во все следы, «отпечатанные» прежде самыми передними ногами. Таким образом, передние «ведущие» ноги «навязывают» свою следовую дорожку всем ногам, следующим за ними (теоретически, ИК многоножек могут шагать и разными др угими способами). В рамках проводимого анализа каждую ногу достаточно охарактеризовать с помощью всего двух крайних точек: точки основания ноги (ТОН), т.е. сустава, которым нога соединяется с туловищем, и дистальной точки ноги (ДТН), с помощью которой животное отталкивается от грунта. Со-вер шенно несущественно, каково реальное строение ноги, с помощью каких члеников (какой формы и размера и сколько их) концевые точки ноги соединяются. Морфология ног может быть любой, на результатах анализа это не отражается. В рамках используемого описания движения ног важно только одно - количественные закономерности перемещения дис-тальной точки каждой ипсилатеральной конечности относительно «своей» точки основания или туловища (каждая точка основания ноги является одновременно и точкой ноги, и точкой туловища). Данное описание может быть применено и к описанию движения других животных.
Цикл движения каждой конечности состоит из двух фаз: фазы опоры, когда дистальная точка ноги находится на грунте и нога толкает
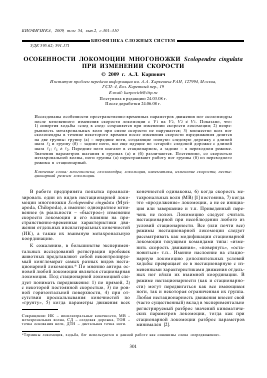
туловище вперед, и фазы переноса, когда эта точка поднята над грунтом и перемещается вперед в точку нового следа. На рис. 1 представлена идеальная схема функционирования всех 20-ти ипсилатеральных конечностей сколопендры при стационарной локомоции вперед. На 20-ти линиях, параллельных о си Ot и представляющих собой траектории ТОН, изображены временные развертки фазовых состояний 20-ти ипсилатеральных конечностей. На этих линиях в виде жирных отрезков изображены фазы переноса длительностью T + . Между фазами переноса расположены фазы опор ы длительностью T_ (индексы «+» и «—» используются для обозначения принадлежности параметра к фазам переноса и опоры соответственно. Т -пер иод локомоторного цикла конечности: Т = = T + + T-; у - параметр структуры локомоторного цикла: у = Т+/Т-. V- - скор ость движения ДТН относительно тела в фазе опоры, V+ - в фазе перено са, скоро сть локомоции всего животного V: V+ = V/y, V = -V-. Длина шага 1 каждой ноги равна расстоянию между ее соседними следами на грунте: 1 = V/Т. Все пр остранственные и скоро стные характеристики измеряются в виде проекций на направление локомоции (вдоль тр аектор ии следовой дорожки). Амплитуда движения дистольной точки ноги относительно туловища обозначается 1_. Этот параметр называется еще опорной длиной шага, так как именно на величину 1_ каждая нога продвигает туловище вперед за время опоры T-: = V/T_ = V + T + , 1- < 1. По аналогии с 1- можно ввести параметр 1+ = V/T + , равный
перемещению туловища за время переноса ноги T +.
При стационарной ходьбе все ипсилатераль-ные конечности сколопендры передвигаются одинаково и с постоянным для данной скорости
V фазовым сдвигом: Yll = фИ/Т, где фН - временной метахрональный сдвиг между движениями соседних ИК. Поскольку величина фН мала (фН < T/2), то на рядах ипсилатеральных конечностей наблюдаются так называемые ме-тахр оналъные волны, распространяющиеся вдоль туловища со скоростью W. При этом направление распространения метахрональных волн относительно туловища и направление движения туловища относительно грунта всегда пр отивоположны, а абсолютная величина скорости метахр ональных волн W равна скорости
V локомоции сколопендры, т.е.
V = -W.
(1)
Из условия (1) следует, что все метахро-нальные волны неподвижны относительно грун-
Рис. 1. Пространственно-временная диаграмма метахрональной координации ипсилатеральных конечностей сколопендры (например, правых) относительно тела при стационарной локомоции с постоянной скоростью V ~ 34 а/с, где а - средняя длина туловищного сегмента. Метахрональная координация левых (не изображенных здесь) ипсилатеральных конечностей абсолютно такая же, но сдвинута по оси Ог на величину Т/2, т.е. левые конечности движутся в противофазе относительно правых. Туловище многоножки ориентировано вдоль вертикальной оси пространственных перемещений Ох, на которой отмечены положения точек оснований всех конечностей. Размерность по пространственной оси Ох - [а], а по временной оси Ог - [с]. Номера траекторий следов обозначены цифрами в кружках. Сечение в момент г = 0,4 с показывает мгновенные положения последних (по времени появления) трех следов с номерами 0-2 правой колеи следовой дорожки, изображенных светлыми кружками. След 2 является самым «новым». Двунаправленные стрелки одинаковой длины указывают расстояния между соседними следами следовой дорожки, равными длине шага 1.
та. И х временной период всегда равен пер иоду Т шага ноги. При постоянной скорости локомоции V скорость W вдоль ряда ипсилатеральных конечностей также постоянна и равна: W = а/фП, где расстояние а (средняя длина туловищного сегмента или среднее расстояние между соседними ипсилатеральными ТОН) принято в качестве «эталона длины» движений сколопендры, т.е. а = 1. Отсюда возникают размерности длины [а] и скорости [а/с]. Использование этой единицы длины позволяет единообр азно (в одном масштабе) представлять пространственные и скоростные параметры для сколопендр разного возраста и длины [2]. Для сравнения с «метрическими» единицами длины и скорости [см] и [см/с] можно принять, что у сколопендры с длиной туловища 10,5 см (это обычная
Для дальнейшего прочтения статьи необходимо приобрести полный текст. Статьи высылаются в формате PDF на указанную при оплате почту. Время доставки составляет менее 10 минут. Стоимость одной статьи — 150 рублей.