ИЗВЕСТИЯ РАН. ТЕОРИЯ И СИСТЕМЫ УПРАВЛЕНИЯ, 2014, № 4, с. 148-160
РОБОТОТЕХНИКА
УДК 531.8
ОПТИМАЛЬНОЕ УПРАВЛЕНИЕ ОРИЕНТАЦИЕЙ ДВУХ ШАРНИРНО СОЕДИНЕННЫХ ТЕЛ В БЕЗОПОРНОЙ ФАЗЕ ДВИЖЕНИЯ*
© 2014 г. Г. К. Боровин, В. В. Лапшин
Москва, ИПМим. М.В. Келдыша РАН, МГТУим. Н.Э. Баумана Поступила в редакцию 23.01.14 г., после доработки 21.02.14 г.
Исследовано движение двух шарнирно соединенных тел в фазе полета (невесомости). Решена задача минимизации и максимизации времени разворота из заданного начального в заданное конечное положение. Предполагается, что при этом кинетический момент системы относительно центра масс отличен от нуля. Данная задача является простейшей моделью управления ориентацией прыгающего аппарата в безопорной фазе прыжка.
Б01: 10.7868/80002338814040040
Введение. При увеличении скорости движения машин, передвигающихся с помощью ног, энергетически выгодно переходить от статически устойчивых режимов ходьбы к динамическим, а затем к бегу и прыжкам аналогично тому, как это имеет место у животных [1, 2]. Этим объясняется интерес к исследованию динамики и управления движением прыгающих и бегающих аппаратов, движение которых состоит в чередовании опорных и безопорных фаз движения.
В безопорной фазе движения центр масс аппарата перемещается по баллистической траектории и его движение не управляемо. Движением же аппарата вокруг центра масс можно управлять за счет изменения движения конечностей или движения одной части корпуса относительно другой [1—16]. Интерес к этой проблеме объясняется как изучением биомеханики движений спортсменов, космонавтов и животных, так и исследованиями динамики и управления движением прыгающих и бегающих аппаратов.
Как для прыгающих аппаратов, так и для животных и человека целью управления является обеспечение требуемого (программного) положения в момент приземления. Задача управления движением в фазе полета разбивается на две подзадачи. Алгоритм построения программного движения определяет скорости всех звеньев аппарата в момент отрыва от опорной поверхности, обеспечивающие переход из заданного начального в заданное конечное положение. Алгоритм стабилизации движения обеспечивает реализацию требуемого положения в момент приземления при наличии возмущений и ошибок отработки программных значений координат и скоростей в момент отрыва от опорной поверхности за счет изменения движения ног относительно корпуса [2, 5—6, 13].
Для исследования вопроса о допустимой величине ошибок, которые способен отработать алгоритм стабилизации, представляет интерес задача об определении минимального и максимального времени разворота аппарата в фазе полета из заданного начального в заданное конечное положение при известной (ненулевой) величине кинетического момента аппарата относительно центра масс. В [16] эта задача решена для простейшей модели аппарата, состоящего из двух твердых тел, соединенных линейным сервоприводом. В данной работе рассмотрена модель аппарата, состоящего из двух шарнирно соединенных тел. Эту модель можно рассматривать как упрощенную модель движения прыгающего аппарата, спортсмена при прыжках в воду или акробата в предположении, что во время полета используется только тазобедренный шарнир.
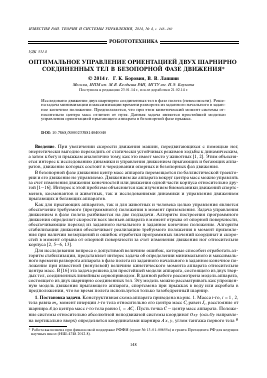
1. Постановка задачи. Конструктивная схема аппарата приведена на рис. 1. Масса /-го, / = 1,2, тела равна т¡, момент инерции /-го тела относительно его центра масс С/ равен I, расстояние от шарнира А до центра масс /-го тела равно ¡^ = АС,. Пусть точка С — центр масс аппарата. Положение системы относительно абсолютной неподвижной системы координат Оху (ось Оу направлена вертикально вверх) определяется координатами шарнира А х, у, углом тангажа первого тела 8
* Работа выполнена при финансовой поддержке РФФИ (грант № 13-01-00655а) и гранта Президента РФ для ведущих научных школ (НШ-4748.2012.8).
О
\ C\
\ а
Рис. 1. Конструктивная схема аппарата
У
x
(углом между горизонтальной осью Ох и линией ЛС1) и углом между телами а, который изменяется с помощью сервопривода.
В безопорной фазе движения имеет место закон сохранения кинетического момента относительно центра масс (относительно осей Кенига, перемещающихся поступательно вместе с центром масс) [17]. Кинетический момент /-го тела относительно осей Кенига определим как сумму кинетического момента центра масс этого тела и кинетического момента вращения относительно собственного центра масс [17]
Kc = J10 + J2((Э + а) + 2 [(r - r) x (V - VC)]z =
i = 1
2
= J10 + J2(0 + а) + 2[(p - Pc) x (Vi - VC)] ,
I = 1
где Г, гС, V, УС — радиус-вектор и скорость центра масс /-го тела и центра масс аппарата в неподвижной системе координат Охуг (ось Ог перпендикулярна плоскости Оху), р, рс, V, — радиус-вектор и скорость центра масс /-го тела и центра масс аппарата в системе координат Лхуг, перемещающейся поступательно вместе с центром масс, индекс г означает, что это координата г векторного произведения. Тогда
= miPi + m2p2 m1 + m2
а V, чс определяются дифференцированием этих соотношений.
Закон сохранения кинетического момента системы относительно центра масс имеет вид
/1 cos 0 /2 cos(0 + а)
р1 = /1 sin 0 . р2 = /2 sin(0 + а) > Рс
0 0
(I1 - 2I0 cos а)0 + (I2 -I0 cos а)а = KC = const,
где
Ix = j1 + J2 + _mm^(/12 + /22), /2 = J2 ¡1 /o = h h
m1 + m2
m1 + m2
m1 + m2
Отметим, что
I1 - 2I0 = J1 + J2 + (/1 - /2)2 > 0.
m1 + m2
(1.1)
Обозначим начальное положение аппарата относительно центра масс как а0 = а(0), 0° = 0(0), а через а ' = а(Т), е" = е(Т) — его требуемое положение в конечный момент времени г = Т. Положим, что а°, ав е [0,2п]. При этом предполагается, что аппарат (точнее первое тело) может совершать заданное количество полных оборотов (сальто). Например, требуемое конечное положение
2
первого тела 9в = 9° + п означает, что оно должно совершить пол-оборота, а 9в = 90 + 3п означает, что оно должно совершить полтора оборота. Поэтому, несмотря на то, что этим значениям угла тангажа соответствует одна и та же ориентация первого тела в пространстве, будем считать, что это два разных значения, соответствующих разному количеству полных оборотов, которые должно осуществить первое тело в безопорной фазе движения.
Для определенности положим
Кс > 0. (1.2)
За управление и = а примем скорость изменения угла в шарнире А и положим, что оно ограничено по величине максимальной скоростью сервопривода |и| < ит.
Уравнения движения аппарата относительно центра масс имеют вид
а = и,
Кс
I2 -I0 cos а
11 - 2I0 cos а 11 - 2I0 cos а Введем новые переменные
x1 = а - п, x2 = 0 + р(а) - 0D - р(аD),
где
р(а) = J-
12 -1 ocos а dа = 1
Ii - 2I0 cos а 2
а +
(212 - Ii)J-
d а
Ii - 2I0 cos а
2 VIl - 4Io
Ii + 2Io tg а
.VIMIo2 2.
Для однозначности положим, что II + 210
Arctg
а
и а/2 лежат в одной четверти. Аналогичная замена переменных использовалась ранее в работах [18—21] в задаче управления движением двузвенного маятника. Тогда
Х2 = е + —а = е + 12-10С°5а а.
йа 11 - 210с°8 а
Задача минимизации времени разворота аппарата в безопорной фазе движения имеет вид
x. = и,
Х2 = ro(x.),
l'xi(0) = xi0, [x2(0) = x°, \u\ < um, T ^ min,
xi(T) = xD = aD, x2(T) = 0,
0 D f n
x., x. e [-n, n],
где
Кс
®(xi) = -T
I. + 210 cos x.
Отметим, что в силу (1.1), (1.2) ra(x.) > 0
(1.3)
(1.4)
(1.5)
(1.6)
(1.7)
(1.8) (1.9)
при любом значении хх. Следовательно, при г > T система не останется в программном положении, а продолжит свое вращение относительно центра масс.
При x1 = 0 аппарат распрямлен (момент инерции относительно центра масс максимальный) и вращение происходит с минимальной угловой скоростью
Кс
®min = Ю(0) =
lC
I1 + 210
При x1 = ±п аппарат сложен (момент инерции относительно центра масс минимальный) и вращение происходит с максимальной угловой скоростью
x2 = 0 = «max = ®(±П = К° .
11 - U 0
2. Решение задачи о минимизации времени разворота. Для решения задачи оптимального быстродействия (1.3)—(1.9) воспользуемся принципом максимума Понтрягина [22, 23]. Гамильтониан Hравен
H =-1 + у1м + у 2ro(x1). (2.1)
Сопряженные переменные являются решениями уравнений
* 1 = -М = 2d-, *2 = -dH = 0. (2.2)
dx1 dx1 dx2
Тогда
у 2 = const. (2.3)
В соответствии с принципом максимума на оптимальной траектории достигается максимум Гамильтониана по и. Оптимальное управление
u* = umSign У1, (2.4)
отметим, что при у1 = 0 значение и* не определено.
На оптимальной траектории справедливо условие трансверсальности
H = -1 + y1u + у 2®(x1) = 0. (2.5)
Если u = um (y1 > 0), то
x1 = C1 + umt, —2 = ^ = x2 + c2, (2.6)
dx1 JC1 um um
где c1, c2 — постоянные интегрирования,
Ф^) = [»(x^ - }Kc Arctg f1- 2I°° tgx1, (2.7)
J VI1 - 210 VI2 - 4I02 2
и для однозначности положим, что Arctg j1- 110 tg ^
411 - 4102 2
и x1 /2 лежат в одной четверти. Тогда ф(х1) — монотонно возрастающая нечетная функция x1. Если u = -um (y1 < 0), то
X1 = d1 - Umt, X2 + d2,
(2.8)
где йъ й2 — постоянные интегрирования.
В вырожденном случае у1 = 0 в течение некоторого интервала времени и у 1 = 0, из (2.2) следует
Um
П x2J x1 xD П
Ro^ г + "T^Jo x1
Ri R2
г -
Г1 R2 Г2
Рис. 2. Линии переключения и области, соответствующие различным оптимальным управляющим последовательностям
d Ш = о dX1
а тогда sin х1 = 0, и в силу (1.3) вырожденные фазовые траектории соответствует управлению u = 0 и
х1 = nn, u = 0, X2 =---= const > 0, где n е {-1; 0; 1}.
Ii - (-1)n2I0
Для задачи быстродействия в силу принципа оптимальности подходят только траектории, соответствующие сложенному положению аппарата:
K
х1 =±n, u = 0, X2 = штах =--— = const > 0. (2.9)
I1 - 210
Через программное конечное положение проходят две фазовые траектории (рис. 2). Одна из них Г + соответствует управлению u = um:
Г — L \ . - ф(хл) - ф(х1/)) < D [
1 + — S (X1, х2) • х2 — , Х1 < X1 f,
I um )
а вторая Г- — управлению u = -um:
Г —\( \ . - ф(х/)) - ф(х1) > D \
1 - — S (X1, х 2) . х 2 — , х1 > х1 f.
I um J
Введем также прямые Г1 и Г 2, соответствующие вырожденному случаю u = 0:
Г1 =k X2): X1 = -п, X2 <Ф(-П) -Ф(xD Я,
I um J
г2 ={(X1, X2): X1 =п, X2 ) ,
I um J
и кривые Г _, Г+:
Для дальнейшего прочтения статьи необходимо приобрести полный текст. Статьи высылаются в формате PDF на указанную при оплате почту. Время доставки составляет менее 10 минут. Стоимость одной статьи — 150 рублей.