ПРИКЛАДНАЯ МАТЕМАТИКА И МЕХАНИКА
Том 78. Вып. 5, 2014
УДК 531.38
© 2014 г. Е. П. Кубышкин
ОПТИМАЛЬНОЕ УПРАВЛЕНИЕ ПОВОРОТОМ СИСТЕМЫ ДВУХ ТЕЛ, СОЕДИНЕННЫХ УПРУГИМ СТЕРЖНЕМ
Построены оптимальные управления поворотом механической системы, состоящей из двух твердых тел, соединенных упругим стержнем, на заданный угол вокруг оси, проходящей через центр масс одного из тел. Решена задача оптимального управления поворотом системы на заданный угол с полным гашением колебаний упругого стержня при минимуме функционала энергии от управляющего момента и задача быстродействия при заданном ограничении функционала энергии от управляющего момента.
1. Уравнения движения. Постановка задачи оптимального управления. Рассмотрим механическую систему, состоящую из твердого тела (назовем его основанием) и жестко связанного с ним упругого стержня постоянного сечения и равномерно распределенной по длине массой. На другом конце стержня жестко закреплено второе твердое тело (груз). Центры масс O{ и O2 основания и груза расположены на касательных, проведенных к центральной оси стержня в точках заделки. Поместим в центр масс Oi две правые прямоугольные системы координат OiXiYlZl и O\X ' Y ' Z ', расположив их таким образом, чтобы центральная ось стержня находилась в плоскостях 0\XY\ и O\X ' Y '. Оси OiZl и OZ совпадают. Система OlXlYlZl связана с инерциальным пространством, а система O\X ' Y ' Z ' — с основанием. Ось OiX' проходит вдоль касательной к оси стержня в точке заделки. Механическая система может совершать вращательные движения вокруг оси OZ, относительно которой приложен момент внешних сил M(t ).
Рассматриваемая система служит механической моделью манипуляционного робота, переносящего груз, рука которого обладает упругими свойствами.
Свяжем с основанием еще одну систему координат OXYZ, поместив ее начало в точку заделки стержня и направив оси параллельно осям системы O\X ' Y ' Z '. Считая упругие смещения стержня малыми и перпендикулярными оси OX, положение механической системы можно охарактеризовать углом поворота 0(t) (между осями O\X\ и OiX ' ) и величиной y(x, t ) поперечной деформации стержня в точке x в момент времени t, которую будем рассматривать в рамках линейной теории прямолинейных стержней [1]. Весом стержня и груза пренебрежем.
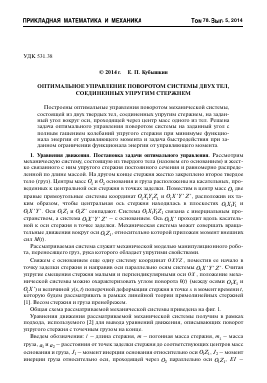
Общая схема рассматриваемой механической системы приведена на фиг. 1.
Уравнения движения рассматриваемой механической системы получим в рамках подхода, используемого [2] для вывода уравнений движения, описывающих поворот упругого стержня с точечным грузом на конце.
Введем обозначения: l — длина стержня, m — погонная масса стержня, m2 — масса груза, ai и a2 — расстояния от точек заделки стержня до соответствующих центров масс основания и груза, J1 — момент инерции основания относительно оси OiZl, J2 — момент инерции груза относительно оси, проходящей через O2 параллельно оси O^, EI —
Фиг. 1
жесткость поперечного сечения стержня, х — координата точки стержня, отсчитываемая от точки O вдоль оси OX.
Свяжем с системой координат СхХ' У' X' единичные орты 1, ] к. Обозначим через г(х, I) радиус-вектор (относительно точки Сх в системе координат СхХ' У' X') точки стержня с координатой х в момент времени (, г0(х, () — радиус-вектор соответствующей точки недеформированного стержня, у(х, () — вектор упругого смещения точки стержня с координатой х в момент времени t, г02 — радиус-вектор точки 02, У о2 — вектор смещения точки 02 относительно оси 0Х, ю и г — угловая скорость и угловое ускорение вращения системы 0уХ'У'X' относительно системы 01Х1У[Х1. Указанные векторы имеют следующий вид:
г0(х, I) = (х + а1)1, г(х, I) = (х + ах)1 + у(х, ЭД
У(х, ^ = у(х, tУi, у 02 = (у(1, ^ + а2Ух (1,0)] (1.1)
Г02 = (I + а1 + а2)1 + (у(1, ^ + а 2 Ух (I, ОМ, и = 9(0к, г = ё(0к
Полное ускорение точки стержня с координатой х относительно инерциального пространства определяется по формуле кинематики относительного движения
а \
1Я(х, t) = — = уп(х, ^ + £ X (Го(х, ^ + у(х, t)) + 2ю X уДх, ^ - (ю, ю)(Го(х, О + у(х, 0) (1.2)
а
где (., .) — скалярное произведение векторов. Возьмем произвольную точку P стержня, радиус-вектор которой ОР = г(х, (), и разобьем стержень на две подсистемы: OP и Р02. Сила, действующая на бесконечно малый элемент стержня длины ds, который содержит точку с координатой s, равна тч(з, (^э.
Подсчитаем главный момент относительно точки P всех сил и моментов, приложенных к точкам подсистемы PO2:
I
^х, 0 = т [ (г(з, 0 - г(х, 0) X t)ds +
: (1.3)
х
+ т2(о - г(х, X ч02 + /2(£ + 1X ух„(I, = Ы(х, 0к
Здесь ч о — угловое ускорение точки O2. Подставив выражения (1.1) и равенство (1.2) в равенство (1.3), после вычислений получим в линейном приближении по у(х, 0 для величины момента выражение
I
И(х, ^ = т|{(5 - х)уи(з, ^ + ^ + - х)9 + [(х + ах)у(з, ^ - (з + ах)у(х, 0]92}dз +
х
+ т2{(1 + а2 - х)[уи(1, 0 + а2Ухи(1, ^ + (I + ах + а2)9 - (у(1,0 + а2ух(1, ф2)] + (1.4)
+ (у(1, ^ + а2ух(I, t) - (I + ах + а2)у(х, 0)ё2} + /2(ух„(I, t) + ё)
Момент (1.4) создается силами упругости, действующими в сечении, проходящем через точку P, и равен величине -Е1ухх(х, ^. Приравняв эту величину к выражению (1.4), получим интегродифференциальное уравнение малых упругих колебаний стержня
I
т|{(з - х)уи(з, () + (з - х)(з + а^ё + [(х + а\)у(з, () - (з + ах)у(х, 0]ё }dз +
х
+ т2{(1 + а2 - х)[уи(1, о + а2ухи(1, ^ + (I + ах + а2)9 - (у(1,0 + а2ух(1,0)92] + (1.5)
+ (I + ах + а2)(у(1, ^ + а2ух(I, ^ - у(х, 0)92} + *2(ухи(I, 0 + 9) + Е1ухх(х, ^ = 0
К уравнению (1.5) добавим уравнение изменения количества движения рассматриваемой системы относительно оси вращения
I
/ё + т^(х + ах)уи(х, ^х + т2(1 + ах + а2)уп(1,0 + та2(1 + ах + а2) + /0 = М(0 (1.6)
о
где
I
С 2 2
/ = /\ + т I (х + а{) dx + т2(1 + а1 + а2) + /2
о
Продифференцировав уравнение (1.5) дважды по x, получим уравнение в частных производных
шу„ + Е1ухххх = -т(х + «1>© + + \т Ухх | + + У - (х + «1>Ух
I -2 (1.7)
+ Ш2(1 + «1 + а2)Ухх !> 0
Систему уравнений (1.6), (1.7) дополним краевыми условиями при х = 0, которые вытекают из способа закрепления стержня:
У(0,г) = Ух(0,г) = 0 (1.8)
При х = ! функция у(х, г) должна удовлетворять условиям, вытекающим из уравнения (1.5):
Е1Ухх(1, г) = -ЫУх« (I, г) + ё) -
- т2а2{Угг(1, г) + а2ум(1, г) + (I + «1 + а2)ё - [у(1, г) - (! + а{)Ух(1, г)]ё2}
Е1Уххх(1, г) = т2{Угг (!, г) + а2ухи (I, г) + (I + а1 + а2)ё - [у(1, г) - (! + ами г)]92} (1.10)
Для однозначного определения решения системы уравнений (1.6), (1.7) с краевыми условиями (1.8)—(1.10) необходимо задать начальные условия в некоторый момент времени. Без ограничения общности считаем его равным нулю:
9(0) = 90, 9(0) = 00, у(х, 0) = у0(х), уг (х, 0) = ^(х) (1.11)
Уравнения (1.6), (1.7) с краевыми и начальными условиями (1.8)—(1.11) описывают движение рассматриваемой механической системы под действием управляющего момента M(t).
Приведем начально-краевую задачу (1.6)—(1.11) к безразмерному виду, положив
■ х ,2 Е1 у , у(х,г) М(г)
х = —, г = ьг, ь =—-, у(х, г) = , М(г) =
¡4 ' ' / ' 1ъи2
I т1 I т1 Ь
т2 = т11, а) = , I) = ^-г, у = 1,2 т! ! т1
и отметим следующее. По аналогии с принятым ранее [2] подходом, учитывая соотношения порядков величин, входящих в уравнения движения и краевые условия, записанные в безразмерных переменных, некоторые члены в этих уравнениях можно опустить.
Так, если угловая скорость 9 мала по сравнению с низшей частотой собственных упру-
■ 2
гих колебаний стержня, то слагаемые порядка 0 могут быть опущены. С учетом этого обстоятельства и опустив штрих у новых переменных, получим следующую линейную начально-краевую задачу в безразмерных переменных:
1
1ё + | (х + а1)угг(х, г)йх + т*уи(1, г) + 1*Ухгг (1, г) = М(г) (1.12)
0
Угг + Ухххх =-(х + а^ё (1ЛЗ)
у(0, г) = Ух(0, г) = 0 (1.14)
Ухх1 г) = —12(Ухгг 1 г) + ё) - т2а2(Угг 1 г) + а2Ухи 1 г)) — (1.15)
yxxxQ-, t) = m(ytt (1, t) + агУх„ (1, t)) + m*Q (l.l6)
9(0) = 0o, 9(0) = è о y( x, 0) = yo(x), yt (x, 0) = yQ(x) (1.17)
где
1
С 2 2
J = Ji + | (x + a{) dx + m2(1 + ai + a2) + J2, m* = m2(1 + ai + a2), J* = m*a2 + J2
0
которая в дальнейшем будет служить математической моделью механической системы. Ниже рассматриваются следующие задачи оптимального управления. Задача 1. Определить момент управления M(() е Lq(0, T), переводящий рассматриваемую механическую систему в силу краевой задачи (1.12)—(1.16) из начального состояния (1.17) в конечное в заданный момент времени T
9(T) = 9т, 9(T ) = 0 t , y(x, T) = Ут (x), yt (x, T) = Ут (x) (1.18)
и минимизирующий функционал
ф(М) = \\М«)\\12(0Л (U9)
Задача 2 (задача быстродействия). Определить момент управления М(() е L2(0,T), Ф(М) < L < ж, переводящий рассматриваемую механическую систему в силу краевой задачи (1.12)—(1.16) из начального состояния (1.17) в конечное (1.18) за минимальное время T.
2. Построение решения начально-краевой задачи (1.12)—(1.17). Выразим ytt (x, t) из
(1.13) и подставим в уравнение (1.12). В результате имеем
( i Л i
J - j (x + aifdx ë - J (x + ai)yxxxx(x, t)dx + m*ytt(i, t) + J*yxtt(i, t) = M(t) (2.1)
0
0
Вычислив входящий в равенство (2.1) интеграл по частям при учете краевых условий (1.15) и (1.16), получим для 0 дифференциальное уравнение
Лё + ахуххх(0, Г) - ухх(0,0 = М(0
Это позволяет выписать для определения у(х, () две эквивалентные начально-краевые задачи:
ytt - J \x + ai)
j (xi + ai)ytt (xi, t)dxi + m*ytt (i, t) + J fy^i, t)
+ yx
(2.2)
= - J \x + ai)M(t)
y(0, t) = yx(0, t) = 0 (2.3)
i
yxx(i, t) = J J 2 j (xi + ai)ytt(xh t)dxi - (J 2 + m2aj - J J f)yx„ (i, t) -
0
(2.4)
- (m2a2 - J -J2m2)ytt(i, t) - J~1J*M(t)
1
+ (ш2а2 - J lJ2m*)yxtt(1, t) + J-lm*M(t)
y(x, 0) = y0(x), yt(x, 0) = y0(x) (2.6)
и
ytt + yxxxx - J-1(x + ai)(aiyxxx(0) - Ухх(0)) = -J-1(x + ai)M(t) (2.7)
y(0, t) = yx(0, t) = 0 (2.8)
yxxl t) - Ji-1J*(aiyxxx(0, t) - yxx(0, t)) = - J + m2a22)yxtt(1, t) - m2a2ytt(1, t) - J—J2* M(t) (2.9)
yxxx(1, t) + J-1m*(aiyxxx(0, t) - yxx(0, t)) = т2Уп11) + m2a2yxtt(1, t) + J11m^M(t) (2.10)
y(x, 0) = y0(x), yt(x, 0) = y0(x) (2.11)
Положим сначала M(t) = 0. Определяя решение y(x, t) в виде y(x
Для дальнейшего прочтения статьи необходимо приобрести полный текст. Статьи высылаются в формате PDF на указанную при оплате почту. Время доставки составляет менее 10 минут. Стоимость одной статьи — 150 рублей.