УДК 620.179.15
ОПТИМИЗАЦИЯ ПАРАМЕТРОВ ГАММА-АБСОРБЦИОННОГО ПЛОТНОМЕРА ПРИ ПОВЫШЕННЫХ ЗАГРУЗКАХ ДЕТЕКТОРА
А.И. Безуглов
Предложены математические соотношения для выбора оптимальных параметров гамма-абсорбционного плотномера при повышенных загрузках детектора. Критерием является минимум погрешности измерения плотности.
Обеспечение необходимой производительности контроля плотности связано с выбором соответствующей активности источника излучения, коллиматора и, как правило, максимальных возможностей используемого детектора для конкретного объекта контроля и конкретных условий эксплуатации плотномера. Ограничение возможностей выбранного детектора определяется наличием так называемого "мертвого времени" т, которым сопровождается каждый акт регистрации детектором гамма-кванта или заряженной частицы, что в итоге приводит к появлению просчетов, оценка которых достаточно детально приведена в [1, 2]. Влияние просчетов на некоторые характеристики плотномера рассмотрено в работах [3—5]. Но при этом не дается четкого правила выбора допустимых загрузок детектора с учетом, например, заданной погрешности измерения плотности, а используемые критерии для оптимизации характеристик плотномера носят, в определенной степени, произвольный характер. В результате сделанные выводы не всегда отражают реальные закономерности процесса измерения плотности и не дают действительно оптимальных характеристик плотномера.
Цель данной работы — установить математические соотношения и условия для выбора оптимальных параметров плотномера при повышенных загрузках детектора, используя при этом такой основной критерий, как погрешность измерения плотности.
В общем случае уравнение узкого пучка для гамма-абсорбционного способа измерения плотности р при малых загрузках дискретного детектора имеет вид
Л/(р, К) = Щехр(-га/гр)] = л(р, К)Ти = л0Г„[ехр(-т/гр)], (1)
где N(p, /г) и п(р, /г) — регистрируемые с детектора соответственно число импульсов за время измерения Ги и скорость счета импульсов при прохождении пучка излучения через объект контроля с плотностью р, толщиной И и массовым коэффициентом ослабления излучения т\ и п0 — регистрируемые с детектора соответственно число импульсов за время измерения Ти и скорость счета импульсов при отсутствии объекта контроля. Для точечного изотропного источника моноэнергетических гамма-квантов с активностью (выходом гамма-квантов в единицу времени) <2 значения Л^ и п0 имеют вид
% = «оТа = (!2 • ГДел)/(4я ■ /?2), (2)
где 5Д — используемая площадь детектора для регистрации пучка излучения; 8Д — эффективность регистрации детектором гамма-квантов с учетом условий селектирования сигналов; — расстояние от источника до детектора.
Все приведенные соотношения между регистрируемыми сигналами и параметрами объекта контроля справедливы при малых загрузках детектора, которые можно определить как пх« 1, согласно [1], а п соответст-
вует (1). При повышенных загрузках детектора, обусловленных увеличением активности источника, например до значения <2, наблюдаемая скорость счета с детектора п будет меньше (из-за просчетов) планируемой п. При этом п может быть определено экстраполяцией известного значения п, соответствующего источнику малой активности ¡2' и условию п'т « 1, из соотношения л/{2 = п'Ю.'.
Соотношения между наблюдаемой с детектора скоростью счета п при повышенной загрузке, экстраполированным значением п и "мертвым временем" т имеют вид [1,2]:
п = пЦ\ + пх); п = л*/(1 - пх), (3)
а относительное значение числа просчетов на основании (3) определится выражением
(я - п)/п = пт. (4)
Подставляя выражение (1) для п в (3), получим формулу для регистрируемой скорости счета в зависимости от параметров объекта контроля и т:
п = [я0ехр(-т/гр)]/[1 + я0техр(-т/гр)], (5)
а зависимость плотности от регистрируемой скорости счета запишется в виде
р = ~{тк)-Лх\{п1[п0{\ - п т)]} = /V, И). (6)
Случайную составляющую абсолютной погрешности измерения плотности можно представить на основании (6) и в соответствии с общей теорией ошибок для косвенных измерений [6] как
Др =
д п
* А п ЛА/' =-Г7-г~т =-—/-гт • (7)
(тк) п 1 - п т] (т!г)Ы (1 -п т)
При этом принималось, что относительная погрешность измерения (А«о/л0) « (Ап'/п*), а /V* и ДМ* образованы умножением соответственно п и Ап* на время измерения Т„.
Общее выражение для случайной составляющей абсолютной погрешности измерения сигнала плотномера можно записать в виде [5, 7]
ДА*= 1рЛ1с;г + с1н, (8)
где <зст и стпн — соответственно, статистическая и инструментальная составляющие среднего квадратического отклонения регистрируемого сигнала плотномера; гр — квантильный множитель [6], определяющий границы доверительного интервала в единицах среднего квадратического отклонения для заданной в нормативных документах доверительной вероятности р (для радиоизотопных плотномеров, в соответствии с [8], р - 0,95; предельное значение г = 1,96 при достаточно большой выборке для оценки о, а при ограниченных выборках можно принять tp = 2,0).
Для математического ожидания значения регистрируемого сигнала М* (поток Пуассона) а2ст = /V*. Инструментальная составляющая погрешности измерения сигнала М* вызвана несовершенством аппаратуры и обусловлена в основном нестабильностями общего коэффициента усиления электронного тракта прибора, уровней дискриминации сигналов [5,9]. В работе
[5] дан анализ влияния cItH на погрешность измерения плотности и выбор оптимальных параметров плотномера, но при этом принималось, что инструментальная погрешность носит аддитивный характер, то есть ст1[Н = const. В большинстве же практических ситуаций нестабильность указанных выше параметров определяет мультипликативный характер инструментальной погрешности измерения N , а именно: om(N*)/N* = унн = const, что отмечено в [9, 10] и использовано для оптимизации контроля.
С учетом приведенных соотношений для составляющих погрешности измерения сигнала N* выражение (8) можно записать в виде
AN* = ¡р'л] W*+yLK)2. (9)
Для предварительного анализа влияния загрузки детектора, выраженной в доле просчетов п'х в соответствии с (4), на погрешность измерения плотности рассмотрим вариант, когда отсутствует инструментальная погрешность, то есть унн = 0. Тогда Д/У* = г -/л^*" = ^^п*!]^, а подставляя это значение в (7) получаем следующее выражение для погрешности измерения плотности:
Ар = —__1 _=-\р _1 (10)
тЧ Тп (1-л*т) л]^ Т„/ х (1 _ „Ч) л/«Ч
Анализ полученной зависимости Др от п в (10) показывает, что она имеет минимум. Частная производная выражения (10) по п имеет вид:
Э (Др) _ tp Ъпх-1
Э п
2mh^Tn (1-„*т) (л*)
3/2 •
(П)
Приравнивая (11) к нулю, получим, что минимальная погрешность измерения плотности Др при фиксированном времени измерения Тв соответствует загрузке детектора, при которой доля просчетов составляет:
пх = ^, (Др = min). (12)
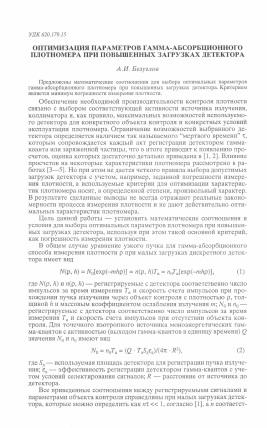
При увеличении загрузки детектора больше указанного значения (пх > 1/3) погрешность измерения плотности начинает возрастать, что отражено на рисунке.
Далее рассмотрим ситуацию, когда значение Др задано (фиксировано) и задача оптимизации контроля сводится к определению минимального времени измерения Ти при повышении загрузки детектора (активности источника излучения). Для этого воспользуемся выражением (10), и после некоторых преобразований получим следующее соотношение:
t]__1 2 1
Тя- 2,2/а„\2 ,/„ * \2 ~С »/ , \2 (13)
m h (Др) п (1-й х) п (1-я х)
Частотная производная Т„ по п имеет вид ЭТи _ (Зи'т-1)
Как следует из выражения (14), при повышенных загрузках детектора и фиксированной погрешности измерения плотности время измерения Т„ достигает минимума при доле пропусков пх = 1/3, а дальнейшее увеличение загрузки приводит к росту Ти (см. рисунок).
1,2
0,8
0,4
о.
<
2 я
о *
с с.
Й -0,4
о о
X
3
и
I" -0.8
С
-1,2
\
\
\
\
\
N X " X
чг
II
- -Др = р-рн1; ■Др = р-рн2;
1
I
I
I
I
4-
т = 0,0001 с"1; т/1 = 1 см3/г;
1.4 — п*1 = 0,1;
2.5 — п] т = 0,2;
3.6 —п\ т = 0,3;
_J_I_
1 \ х х
X X X X X X X
X X
1,0 1,2 1,4 1,6 Плотность, г/см3
2,0
Зависимости случайной составляющей абсолютной погрешности измерения плотности Др (кривые 1,2) при фиксированном времени измерения (Ги = 20 с) и необходимого времени измерения Т„ (кривая 5) при фиксированной погрешности (Др = 0,02 г/см3) от загрузки детектора, выраженной в доле пропусков п'т. тИ = 1 см3/г; 1р = 2;х = 0,0001 с; / — у„„ = 0; 2 — уи> = 0,003.
ч
V
/
/
/
ч
ч
/
/
/
На основании анализа (10) и (13) и данных рисунка можно отметить, что с увеличением загрузки детектора при подходе к значению, соответствующему пх = 1/3, происходит очень малое изменение (уменьшение) параметров Др и Ти. Так, при переходе от {п* т = 0,2) до (пх = 1/3), что эквивалентно увеличению активности источника излучения в два раза, погрешность измерения плотности Др уменьшается на 7 %, а время измерения — на 13,6 %.
Рассмотрим влияние инструментальной составляющей погрешности измерения сигнала на оптимальные характеристики плотности. Подставляя (9) в (7), получим следующее выражение для погрешности измерения плотности:
1р V «X+Ун„| 'пТ, Г
тк (п%) 1(1- /2*х)
а частная производная Ар по я* запишется в виде
'з(пх)-1 + у2ш(пх)2{Ти/х)
Э(Ар) _ Т» я Г +у2 и (и н(п%] 2 -1/2
дп* т1г 2 л*Ги)(1-лЧ Г
. (16)
Приравнивая (16) к нулю, получаем уравнение для пх, соответствующего минимуму погрешности Ар:
1
п х ■
1-у
(17)
Анализ выражения (17) показывает, что при уин = 0 выражение (17) совпадает с (12), а для уин ^ 0 минимум погрешности измерения плотности соответствует пх < 1/3, которое вычисляется по нижеприведенной формуле (кривая 2 на рисунке), причем для унн —> 0, пх —» 1/3
п х =
^ 9 + 8 (7,,/т) УиН -3 4(Ти/х)у2ин
(18)
Нужно заметить также, что и само значение мультипликативной инструментальной погрешности у1|Н увеличивается с ростом загрузки детектора из-за изменения амплитудного спектра регистрируемых импульсных сигналов.
Рассмотрим также вопрос об оптимальной толщине /г объекта контроля при уин = 0. Подставляя последовательно в (10) выражения (3) и (1), получим в явном виде зависимость погрешности измерени
Для дальнейшего прочтения статьи необходимо приобрести полный текст. Статьи высылаются в формате PDF на указанную при оплате почту. Время доставки составляет менее 10 минут. Стоимость одной статьи — 150 рублей.