7. Nowozynski K., Ernst T., Jankowski J. Adaptive smoothing method for derivation of K-indices // Geophys. J. Int. 1991. V. 104. P. 85—93.
8. Гвишиани А. Д., Агаян С. M., Богоутдинов Ш. Р., Каган А. И. Гравитационное сглаживание временных рядов //Труды Института математики и механики УрО РАН. 2011. Т. 17. № 2. С. 62—70.
9. Марчук В. И., Румянцев К. Е., Шерстобитов А. И. Фильтрация низкочастотных процессов при ограниченном объеме результатов измерений // Радиотехника. 2006. № 8. С. 3—7.
10. Первушина Н. А., Доновский Д. Е. Методика скользящей кусочно-линейной аппроксимации с адаптацией ширины окна фильтрации // Материалы XII Всерос. Совещ. по проблемам управления (ВСПУ-2014). М., 2014. С. 8444—8455.
11. Баскаков С. И. Радиотехнические цепи и сигналы: Учебник для вузов. М.: Высшая школа, 2000.
12. Katkovnik V., Egiazarian K., Astola J. Local Approximation in Signal and Image Processing. N.Y.: SPIE Publ, 2006.
13. Гетманов В. Г. Цифровая обработка нестационарных колебательных сигналов на основе локальных и сплайно-вых моделей. М.: Изд-во НИЯУ МИФИ, 2011.
14. Дунин-Барковский И. В., Смирнов Н. В. Теория вероятностей и математическая статистика в технике. М.: Наука, 1969.
15. Bureau Central de Magnetisme Terrestre. [Офиц. сайт] http://www.bcmt.fr (дата обращения 10.12.2014 г.)
Дата принятия 16.04.2015 г.
519.27
Орбитальная калибровка магнитометров микроспутника на основе линейного
фильтра Калмана
Ч. М. ГАДЖИЕВ
Стамбульский технический университет, Стамбул, Турция, e-maii.cingiz@itu.edu.tr
Оценено смещение нуля магнитометра с помощью линейного фильтра Калмана. Предложен алгоритм калибровки магнитометра с использованием параметров, характеризующих динамику вращательного движения пикоспутника.
Ключевые слова: магнитометр, калибровка, фильтр Калмана, микроспутник.
The magnetometer zero drift is estimated by means of linear Kalman filter. An algorithm of magnetometer calibration with use of parameters characterizing the picosattellite rotary motion is suggested.
Key words: magnetometer, calibration, Kalman filter, microsatellite.
В последнее десятилетие значительно возросла популярность микроспутников, что привело к разработке легких и точных датчиков. Одним из таких датчиков является трехосный магнитометр. Его преимущества — возможность непрерывных измерений ориентации спутника по двум осям, относительно низкие стоимость и энергопотребление. В начале полета спутника магнитометры играют важную роль в системе определения и контроля его ориентации, однако из-за смещения нуля, погрешностей масштабирования и юстировки можно получить ошибочную информацию. Калибровка магнитометра позволяет повысить точность ориентации спутника и управлять ею. Разработка простых и малозатратных в вычислительном плане алгоритмов полетной калибровки магнитометра очень важна для пико- и нано-спутников.
Ниже на основе линейного фильтра Калмана предложен
алгоритм калибровки смещения нуля магнитометра на орбите. При этом предполагается знание ориентации спутника, которая определяется, например, с помощью GPS, звездных датчиков и т. д., причем динамика космического аппарата не принимается во внимание. Вычислительные затраты предложенного алгоритма калибровки малы. Алгоритм предназначен для пико- и наноспутников, которые имеют три магнитометра датчиков измерений при ограниченных возможностях обработки информации компьютером системы ориентации.
Модель измерения магнитометром. При движении спутника по орбите вектор магнитного поля изменяется вместе с орбитальными параметрами. Если эти параметры известны, то составляющие вектора индукции магнитного поля можно представить аналитически в виде функции времени в орбитальной системе координат [10]:
Вох (t) = Mer03 [cos rn0t(cos e sin i - sin e cos i cos rnet) -
- sin rn0t sin esin rnet];
BOY(t) = -Mer0-3 (cos e cos i + sin e sin i cos rnet); (1)
BOZ(t) = 2Mer03 [sin rn0t (cos e sin i - sin e cos i cos rnet)
- 2 sin rn0t sin e sin rnet ],
где Me = 7,943-1015 Вб-м — магнитный дипольный момент Земли; r0 = 6928140 м — расстояние между центрами масс спутника и Земли; ю0 — угловая скорость орбиты отно-
ч 1/2
сительно инерциальной системы координат, ю0 = (ц / гЗ
ц = 3,98601-1014 м3/с2 — гравитационная постоянная Земли; юе = 7,29-10-5 рад/с — скорость вращения Земли; е = 11,7°, i = 97° — наклонения соответственно магнитного диполя и орбиты.
Три бортовых магнитометра спутника измеряют компоненты вектора индукции магнитного поля в связанной (с корпусом спутника) системе координат (ССК). Поэтому для модели измерения в ССК полученные составляющие магнитного поля должны быть преобразованы с использованием матрицы направляющих косинусов А. Общую модель измерения можно представить как
(2)
где Втх (ф, 0, у, Вту (ф, 0, у, 0, Втг (ф, 0, у, 0 — измеренные компоненты вектора индукции магнитного поля Земли в ССК в зависимости от времени и с разными углами Эйлера; Ьт -
вектор смещения нуля магнитометра, Ьт
V ({) — гауссов белый шум с нулевым средним и характеристикой
Bmx (ф, 9, V, t) / "Sox (t)" \
Bmy (ф, 0, V, t) = A B0y (t) + bm + v (t)
Bmz (ф, 0, V, t) _ \ "Soz (t). /
:[v(k) vт (j)]= /зхз d S(kj);
Е — оператор математического ожидания; /3х3 — единичная матрица размерностью 3х3; ст — стандартное отклонение погрешностей каждого магнитометра; 8(к/) — символ Кронекера.
Чтобы магнитометр измерял с высокой точностью, его необходимо предварительно (до выполнения задания) от-калибровать на Земле или на орбите. Точная калибровка магнитометров на Земле представляет большие трудности, поэтому на Земле проводят грубую калибровку. Кроме того, вибрации при запуске и последующие возмущающие воздействия могут ухудшить первичную калибровочную характеристику магнитометра. В связи с этим погрешности смещения нуля точно оценивают по реальным измерениям на орбите [2]. Ниже для орбитальной калибровки магнитометров предлагается использовать линейный фильтр Калмана (ЛФК).
Оптимальный линейный фильтр Калмана. Рассмотрим линейную дискретную динамическую систему вида
х (к + 1) = ф (к + 1, к) х (к) + G (к + 1, к) М(к); (3) г (к) = Н (к) х (к) + V (к) ,
где х (к), г (к) — соответственно т- и s-мерные векторы состояния системы и измерения в момент времени tk; ф (к + 1, к) — переходная матрица системы размером тхт; G (к + 1, к) — переходная матрица шумов системы размером тхГ; М(к) — случайный г-мерный гауссов вектор шумов системы с нулевым средним и известной ковариационной матрицей; Н (к) — матрица измерения системы размером sхm; V (к) — случайный s-мерный вектор гауссовых шумов измерений с нулевым средним и известной ковариационной матрицей.
Корреляционные связи между шумами системы и измерений отсутствуют. Ковариационные матрицы для векторов М (к) и V (к) задают в следующем виде:
=[ Ф{°(к)' j;*' EK)WT Ф {о,
E [[ (k) vт (j )] = 0.
JQ(k), j = k, j * k;
Как известно [11], оптимальный ЛФК, который оценивает состояние системы (1), выражается с помощью уравнений
X (к/к) = X (к/к -1) + К (к) [ (к) - Н (к) X (к/к -1)], (4)
где х (к/к -1) = ф (к, к -1) х (к -1/к -1) — оценка экстраполяции; К (к) — матрица усиления оптимального линейного фильтра Калмана,
К (к) = Р (к/к - 1) Нт (к) [Н (к) Р (к/к - 1) Нт (к) + Я (к)]-1; (5) Р (к/к) = [I- К (к) Н (к)] Р (к/к - 1) (6)
— ковариационная матрица погрешностей фильтрации; I — единичная матрица;
Р (к/к - 1) = ф (к, к - 1) Р (к - 1/к - 1) фт (к, к - 1) +
+ G (к, к - 1) Q (к - 1) Gт (к, к - 1) (7)
— ковариационная матрица погрешностей экстраполяции. Для оптимального фильтра Калмана процесс обновления
Д (к) = г (к) - Н (к) х (к/к -1)
в калмановском фильтре (4)—(7), согласованном с моделью динамики системы, представляет белый гауссов шум с нулевым средним и ковариационной матрицей [12]:
РД (к) = Н (к) Р (к/к - 1) Нт (к) + Я (к).
С целью контроля работы фильтра Калмана удобнее
использовать нормализованный процесс обновления
А (к) = [н (к) Р (к/ к -1) Нт (к) + Я (к)]-1/2 А (к),
так как в этом случае Е [[ (к) А (/)] = 1Ъ (к/). Поскольку нормализованные процессы обновления подчинены распределению N (0,1), то при оптимальном функционировании фильтра Калмана они с вероятностью 0,9986 будут находиться в пределах интервала [-3, +3].
Рассмотрим способ оценивания смещения нуля магнитометра на основе использования ЛФК. Уравнение состояния в данном случае можно представить как Ь = иЬ или в конечно-разностном виде
Ь (к) = Ь (к - 1) + Т8 иь (к - 1), (8)
где иь (к) = [иЬх (к) иЬу (к) иь^ (к)] — белый шум с нулевым
средним; Т3 — шаг дискретизации.
В пространстве состояний выражение (8) можно записать в следующей форме:
(9)
Предполагается, что наблюдение за состоянием системы (9) проводится в соответствии с линейным уравнением наблюдения (2):
Вт(к) = А (к) 80(к) + Ь(к) + v(k\
где Вт (к) — измеренный вектор магнитного поля Земли в ССК; Ь (к) — вектор смещения нуля магнитометра.
Приведем линейную модель состояния (9) к форме (3):
Ь(к + 1) = Ь(к) + Т8 иь (к); Вт (к) = А (к) Во(к) + Ь(к) + v(k). (10)
Применение фильтра Калмана (4)-(7) к модели (10) с параметрами
Ьх (к)" 1 0 0" Ьх (к - 1)" %(к - 1)
Ьу (к) = 0 1 0 Ьу (к - 1) + т* иЬу (к - 1)
А (к) _ 0 0 1_ _ bz (к - 1) _ иЬ2 (к - 1) _
Ф (к + 1, к) = I; Н (к) = I; в (к + 1, к) = Т5; М (к) = иь (к); Q (к) = Qub (к) ;
Е [V (к) Vт (/)] = (к) = сНад (а2т, а2т, а2т)
дает соотношения
Ь(к) = Ь(к - 1) + К(к)[ (к) - Ь(к -1) - А(к)Во(к)], (11) К (к) = Р (к/к - 1) [Р (к/к - 1) + ^ (к)]-1; Р (к) = [I- К (к)] Р (к/к - 1); Р (к/к -1) = Р (к - 1) + Г,2 QuЬ. Процесс обновления фильтра Калмана в этом случае
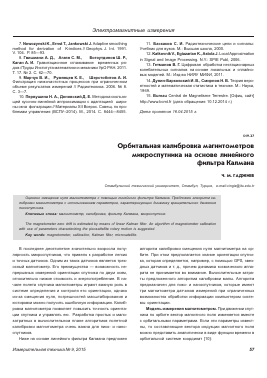
Ь2, Ъ2, мкТл -3-
-4-
-5-6
. - - _ - - _. - У-
у
250
Ьг - ЬГ мкТл
—I— 500
а
750
и с
Рис. 1. Истинное Ь2 и оцененное Ь2 значения смещения нуля (а), разница между ними (б) и дисперсия погрешностей оценок (в)
можно представить с помощью формулы
А (к) = Вт (к) - Ь(к -1) - А(к)Во (к) Ь(к -1). (12)
Нормализованный процесс обновления фильтра Кал-мана будет иметь вид
А (к) = [Р (к/к -1) + ^ (к)]-1/2 А (к).
Как следует из (11), (12), для работы предложенного алгоритма необходимо знать матрицу преобразования А(к), позвол
Для дальнейшего прочтения статьи необходимо приобрести полный текст. Статьи высылаются в формате PDF на указанную при оплате почту. Время доставки составляет менее 10 минут. Стоимость одной статьи — 150 рублей.