ПРИКЛАДНАЯ МАТЕМАТИКА И МЕХАНИКА
Том 79. Вып. 2, 2015
УДК 531.31
© 2015 г. А. В. Сахаров
ПОВОРОТ ТЕЛА С ДВУМЯ ПОДВИЖНЫМИ ВНУТРЕННИМИ МАССАМИ НА ШЕРОХОВАТОЙ ПЛОСКОСТИ
Рассматривается двумерное движение системы, состоящей из твердого полого тела, опирающегося на шероховатую плоскость, и двух внутренних подвижных точечных масс, способных двигаться параллельно продольной оси симметрии тела. Трение в области контакта моделируется локальным законом Амонтона—Кулона. Для описания распределения нормальных напряжений используется динамически согласованная линейная модель. Исследуется возможность реализации поворота системы за счет определенного относительного движения внутренних масс. Рассматриваются два закона управления подвижными массами: кусочно-линейный и гармонический, для которых уравнения движения численно проинтегрированы при разных значениях параметров законов управления. Анализируются особенности движения системы для выбранных законов. Устанавливается, что для двухфазного кусочно-линейного закона управления поворот системы выходит на установившийся режим. Находятся параметры кусочно-линейного закона управления, доставляющие максимум средней угловой скорости тела в установившемся режиме движения.
Движение робота без внешних движителей можно осуществить благодаря перемещению подвижных внутренних масс и взаимодействию с окружающей средой посредством силы трения. Исследовалось одномерное движение системы с двумя подвижными массами при наличии сухого трения, определены оптимальные параметры, при которых достигается наибольшая средняя скорость движения тела при наложенных ограничениях [1, 2]. Рассматривалось управление робототехническим средством, способным перемещаться вдоль прямой, в виде тела с одной и двумя подвижными внутренними массами для трех моделей сопротивления движению корпуса робота в среде: кусочно-линейное трение, квадратичное трение и сухое трение [3]. Исследовалось двумерное движение трехмассового робота в жидкой среде за счет перемещения двух внутренних масс при наличии сил вязкого сопротивления [4, 5]. Доказана принципиальная возможность поворота тела на шероховатой плоскости при наличии ротора внутри полости тела, ускоренно вращающегося вокруг его продольной оси симметрии [6, 7].
На Международной конференции "Нелинейная динамика и ее приложения" (Ярославль, 15—18 октября 2013 г.) после доклада автора В.В. Козлов предложил [8] рассмотреть мобильную систему, состоящую из полого тела и двух точечных масс, двигающихся внутри него параллельно продольной оси симметрии тела (подобно изученным ранее случаям [4, 5]). Ожидалось, что движение точечных масс в противофазе должно приводить к повороту тела на плоскости. Ниже исследуется это предположение на примере кусочно-линейного и гармонического законов управления внутренними массами.
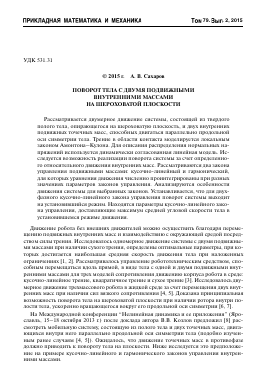
Фиг. 1
1. Модель системы. Рассмотрим на горизонтальной шероховатой плоскости твердое полое тело массы m0, представляющее собой параллелепипед, длиной a, шириной b и высотой 2h. Введем в рассмотрение неподвижную систему координат O' xyz с началом на плоскости и связанную с телом систему O^nZ с началом в его центре масс. Оси O' z и OZ направим вертикально вверх, ось O£ — параллельно большему ребру основания параллелепипеда, ось O п — так, чтобы система образовывала правую тройку. Считаем, что в начальный момент времени соответствующие оси обеих систем сонаправлены. Главные оси центрального эллипсоида инерции тела совпадают с осями системы O^nZ. Осевой момент инерции относительно оси OZ равен C. Внутри тела располагаются две материальные точки с массами mi = m2. Они могут перемещаться относительно тела по двум направляющим, параллельным его продольной оси симметрии и лежащим в горизонтальной плоскости, проходящей через геометрический центр тела (фиг. 1). Направляющие расположены на равных расстояниях п1 = -Ц2 > 0 от геометрического центра тела. Описанную систему будем далее называть ползуном.
Осевой момент инерции C тела вычислим как сумму моментов инерции относительно оси OZ шести образующих тело прямоугольных однородных пластин одинаковой плотности р. Пластины, образующие нижнюю и верхнюю грани параллелепипеда, обладают моментом инерции
Cab = mb (a2 + b 2)
По теореме Гюйгенса—Штейнера моменты инерции оставшихся четырех пластин, образующих боковые грани, равны соответственно
С _ така2 , такь2 С _ тьф2 тька2
Сак =--+--, Ськ =--+--
12 4 ь" 12 4
Тогда момент инерции тела
С = 2 (СаЬ + СаН + СЬН)
Масса тела складывается из масс образующих его граней: т = 2 (таь + таН + тьН), таь = раЬ, таН = 2рак, тьН = 2рЬН Используя приведенные выше соотношения, окончательно получим
аь(а2 + ь2) + 2к (а + ь)3
С = т0-
12 (аь + 2ак + 2ьк)
Положение ползуна определяется тремя координатами: х0 и у0 задают точку О в неподвижной системе координат (аппликата этой точки постоянна и равна к), угол ф между осями О' х и Озадает поворот ползуна относительно его начального положения.
2. Силы, действующие на ползун. Теоремы о движении центра масс и изменении кинетического момента ползуна относительно полюса О выражаются уравнениями
тгО = К, + N + Т, К0 = МО + Мо + МО + тиО х и0; т = т0 + 2т1
(2.1)
где гО = О' О — радиус-вектор, направленный из точки О' к центру масс О ползуна, Е — действующая на него сила тяжести, N и T — главные векторы нормальной реакции и сил
трения, К О — кинетический момент ползуна относительно полюса О, МО — момент силы тяжести относительно полюса О, Мо и МО — главные моменты нормальной реакции и сил трения относительно полюса О, и иО — скорости точек О и О.
В общем случае центр масс тела О и центр масс ползуна (состоящего из тела и двух подвижных масс) О не совпадают. Радиус-вектор гО можно выразить через вектор ГО = ОО:
_ тоГО+тЛ+тЛ _ т0гО + т (го + Г01) + т (го + г02 ) _ , ,ти ,
гО -- -- - ГО + — (01 + ГО2) (2.
2)
где г и Г2 — радиус-векторы, проведенные из точки О' к первой и второй подвижным массам, соответственно. Радиус-векторы гО, гО1 и гО2, а также направляющие орты связанной с телом системы координат таковы:
хО 008 ф - ф "0"
го = Уо , е1 = зт ф , е 2 = 008 ф , к = 0
к 0 0 _1_
Г01 = () е1 +П1е2, ГО2 = ^2 () е1 +П2е2
Кинетический момент ползуна можно представить как сумму трех составляющих:
К О = К ОО + К О1 + К О2
где K 00 = Ср k — кинетический момент тела, K Oi — кинетические моменты первой (i = 1) и второй (i = 2) внутренней массы. Для вычисления K0i воспользуемся формулой Эйлера, выражающей распределение скоростей точек внутри твердого тела, и теоремой о сложении скоростей точки в сложном движении. Получим
K oi = roi х m^i = m^oi x ( Uo + Ф k x roi + 1i (t ) ei ) =
l 2 ■ \ (2.3)
= mi (roi x иo + <proi x k x roi + (t) roi x ei) = mi (roi x иo + <pok - ^i (t) nk)
где ui — абсолютная скорость i -й внутренней массы.
Сила тяжести, главные векторы нормальной реакции опоры и силы трения, а также соответствующие им моменты определяются выражениями
Fg = -mgk, N = k j] nAds, T = JJt Ads
2
M o = roi X mi gk = -mi g (roi + ro2 ) x k (2.4)
i=i
M o = jj nAroA x kds, mo = ¡¡roA x t Ads; roA = oA
Интегрирование всюду ведется по области Б п), состоящей из точек тела, соприкасающихся с опорой; па и tа — нормальное и касательное напряжения в точке А е Б. Трение локально описывается законом Амонтона—Кулона
1 А =-^па Г1, иА * 0; а\ иА = 0; иА = ^ га = 0~А
|и а|
где ^ — коэффициент трения.
Условие неразрывности контакта тела с плоскостью накладывает на кинематические характеристики ползуна три независимых ограничения. Поэтому модель нормальных напряжений па должна включать три независимых параметра Х0, ^ и Х, определяемых в каждый момент времени из этих ограничений. Такая модель распределения нормальных напряжений динамически совместна [8, 9], причем
Па =Хо + ^2П, (£,П) е Б (2.5)
Физической интерпретацией этой формулы может служить представление о наличии малых деформаций в области контакта ползуна с плоскостью, приводящих к нормальным напряжениям по закону Гука.
Подставляя уравнение, выражающее закон Амонтона—Кулона, и выражение (2.5) в формулы (2.4), затем подставляя полученные выражения в систему из шести скалярных уравнений (2.1), получим уравнения движения ползуна в замкнутой форме. В каждый момент времени неизвестными являются обобщенные координаты х0, у0 и ф, а также коэффициенты Х0, ^ и ^2 линейной модели (2.5).
3. Синфазное и противофазное движения внутренних масс. Для осуществления поступательного и вращательного движения ползуна предлагается управлять внутренними подвижными массами двумя способами.
Способ 1. Поступательное движение ползуна осуществляется путем перемещения массы (с помощью некоторого двигателя) периодически и синфазно: ^ (г) = (г). При этом периодическое перемещение разбивается на две фазы: сначала массы перемещаются с ускорением, позволяющим преодолеть силу трения между телом и плоскостью, благодаря чему ползун движется, затем массы передвигаются в исходную позицию с
ускорением, заведомо меньшим требуемого для преодоления силы трения покоя. Благодаря этому попятного перемещения ползуна не произойдет. Указанное движение масс эквивалентно случаю перемещения одного тела массы 2т1 вдоль продольной оси симметрии тела. Такой способ поступательного продвижения системы хорошо изучен (см. например [1—3]).
Способ 2. Управление внутренними массами заключается в перемещении их периодически и в противофазе: ^ (г) = (г). Предполагается, что такое управление должно (при определенных условиях) приводить к повороту ползуна на плоскости. Заметим, что уравнения (2.1) при этом значительно упрощаются, благодаря тому, что центр масс ползуна О будет совпадать с центром масс тела 0. Действительно, учитывая равенство (2.3) и равенство п = -П2, получим
Го = го + — (Г01 + Г02) = го + т ((1 (г) е1 + П1е2 + (2 (гК + П2е2) = Го т т
Уравнения (2.1) примут вид
тг0 = ^ + N + Т, К 0 = Мо + МО (3.1)
Используя равенства (2.3) запишем сумму кинетических моментов двух подвижных масс:
2
к01 + к02 = т^ (Го,- х ио + фОк - £, (г) п,к) =
г=1
= т1(0о21 + 4)ф - (1 (г) П1 +12 (г) П2 ))к = 2т1((^2 (г) + щ2)Ф -11 (г) т)к
Тогда кинетический
Для дальнейшего прочтения статьи необходимо приобрести полный текст. Статьи высылаются в формате PDF на указанную при оплате почту. Время доставки составляет менее 10 минут. Стоимость одной статьи — 150 рублей.