3. Григорьев С. Н., Мастеренко Д. А., Телешевский В. И., Емельянов П. Н. Современное состояние и перспективы развития метрологического обеспечения машиностроительного производства // Измерительная техника. 2012. № 11. С. 56—59.
4. Григорьев С. Н., Телешевский В. И. Проблемы измерений в технологических процессах формообразования // Измерительная техника. 2011. № 7. С. 3—7.
5. ГОСТ 2789—73. Шероховатость поверхности. Параметры и характеристики.
6. Григорьев С. Н., Кутин А. А., Долгов В. А. Принципы построения цифровых производств в машиностроении // Вестник МГТУ «СТАНКИН». 2014. № 4. С. 10—15.
7. Клевалин В. А., Поливанов А. Ю., Шатунов К. В. Повышение точности систем технического зрения промышленных роботов за счет калибровки приемника изображения // Вестник МГТУ «СТАНКИН». 2013. № 1. С. 34—37.
8. Телешевский В. И., Шулепов А. В., Роздина Е. М. М етод интеллектуальной компьютерной микроскопии при измерении линейных и угловых размеров изделий // Измерительная техника. 2011. № 8. С. 3—6.
9. Латонов И. В., Шулепов А. В. Способ бесконтактной оценки шероховатости поверхности по ее цифровому изображению, формируемому оптической системой измерительного микроскопа // Вестник МГТУ «СТАНКИН». 2013. № 1. С. 1 41 —1 45.
10. Телешевский В. И., Шулепов А. В., Роздина Е. M. M е-
тоды повышения точности универсальных и инструментальных компьютерных измерительных микроскопов // Технология машиностроения. 2012. № 1. С. 41—44.
11. Телешевский В. И., Богомолов А. В. Компьютеризация контактных интерферометров в белом свете на основе оптической обработки изображений // Измерительная техника. 2006. № 7. С. 35—38.
12. Зуйков А. А., Шулепов А. В. Повышение точности измерений малогабаритных объектов с применением специальных систем визирования в компьютеризированных измерительных микроскопах // Приборы. 2012. № 9. С. 39—44.
13. Microscopes. [Офиц. сайт] http://tut.ru/15917 (дата обращения 01.04.2015 г)
14. Свидетельство о государственной регистрации программы для ЭВМ № 2015610600 «Программное обеспечение компьютеризированного прибора светового сечения» / С. Е. Педь, П. В. Дружинин, Д. С. Щербицкий // Программы для ЭВМ, базы данных, топологии интегральных микросхем. 2015.
15. ГОСТ 9847—79. Приборы оптические для измерения параметров шероховатости поверхности. Типы и основные параметры.
Дата принятия 15.04.2015 г.
681.786.4
Применение структурированного света для фотограмметрического метода измерений
поверхностей сложной формы
С. Г. КОНОВ, А. А. ХОХОЛИКОВ, А. А. ГОЛОЛОБОВА
Московский государственный технологический университет «СТАНКИН»,
Москва, Россия, e-mail: public32@gmail.com
Исследованы технологии идентификации сопряженных пар точек на изображениях путем применения структурированного света. Оценено влияние основных источников погрешности на работу фотограмметрической информационно-измерительной системы.
Ключевые слова: фотограмметрия, пространственная измерительная система, структурированный свет, сопряженные точки, поверхности сложной формы.
The technologies of identification of conjugated dots on the images using the structured light have been studied. The influence of the main error sources on the information-measuring system operation have been assessed.
Key words: photogrammetry three-dimensional measuring system, structured light, conjugated dots.
В машиностроении усложнение геометрических форм поверхностей объектов способствует появлению новых функциональных возможностей и росту качества продукции [1]. Так, проектирование автомобилей, самолетов и других транспортных средств осуществляется с учетом аэродинамических характеристик, что позволяет снижать расход топлива при эксплуатации, добиваться более высоких скоростей передвижения. Аналогичные примеры можно привести и из других областей [2], поэтому вопрос обеспечения качества
изделий сложной формы в машиностроении является актуальным, при этом особое внимание следует уделять процедурам контроля геометрической точности изготовления поверхностей.
При исследовании поверхностей сложной формы используют два основных вида измерений: контактные и бесконтактные [3]. Учитывая уровень развития измерительной техники, можно заключить, что отдельные виды контактных методов обеспечивают высокую точность (достижимая
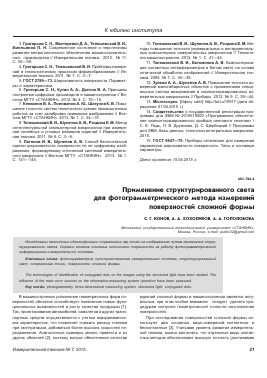
Схема фотограмметрической измерительной системы: 1, 3 — плоскости изображений точки М; 2 — исследуемая поверхность; S', S" — центры проекций фотограмметрических камер
погрешность при пространственных координатных измерениях составляет 1—2 мкм в рабочем пространстве 700x700x700 мм), однако контактная координатно-изме-рительная техника имеет относительно невысокую производительность — десятки и сотни отсчетов в секунду. В последнее время широкое распространение в машиностроении получают бесконтактные методы, при этом доминирующими являются две технологии: пространственная триангуляция и фотограмметрия, основанные на использовании априорной информации о пространственном расположении камер, фотографирующих объект измерений. Такую информацию получают в процессе калибровки, базирующемся на применении опорных измерительных маркеров в пространстве [4]. Объединяющим для двух технологий является использование структурированной подсветки исследуемой поверхности объекта для выявления на ней отдельных точек, координаты которых составляют выходной файл данных — набор пространственных координат, называемый «облаком точек».
Обращаясь к технологии фотограмметрии, отмечаем, что изображения, формируемые камерами, основаны на центральном проецировании исследуемых поверхностей в плоскость изображения [5]. Таким образом, имея координаты проекций т', т" одной и той же пространственной точки М в системах координат, связанных с каждой из камер, и координаты центров проекций камер 8', 8", можно восстановить линии проекционной связи и таким образом выявить координаты искомой точки М как точки их пересечения (рисунок). При этом, исходя из положений аффинной геометрии, искомые координаты точки М находят при решении системы линейных уравнений
а'Хм -) + Ь Хм -Гт) + с/ Хм -Zs') . аз (Хм -^) + ьэ Хм ) + сэ Хм -Zs■)'
Ут =
Хт" =
Ут" =
4 (Хм - Ху) + ь2 (Хм -уу) + Хм - Zs'). 4 (Хм - Ху) + ь3 Хм -уу) + с3 Хм - Zs')' а/' (Хм - Ху") + ь/' (Ум -У8") + с/' Хм - Zs") ;
'з' (Хм -Ху") + Ьз" (ум -У8") + с3' Хм -Zs'■)'
а2' (Хм -Ху") + ь2 (Хм -У8") + с2' Хм -Zs") 'з' (Хм - Ху") + ьЗ (Хм - Уу") + сз'' Хм - Zs")
(1)
где Хм, Yм, Zм — искомые пространственные координаты точки м; хт, ут, хт", ут„ — координаты проекций точки м в
левой и правой камерах, соответственно; Х3,, Ys,, Zs,, Х3„, Ys„, Zs„ — пространственные координаты центров проекций левой и правой камер, определяемые в процессе их калибровок; а', Ь', с', а'', Ь'•', с'•' — параметры аффинного преобразования, реализуемого камерами, также определяемые в процессе калибровок.
Систему (1) можно привести к матричному виду и решить методом наименьших квадратов. Таким образом, процесс измерений пространственных координат точки м сведется к детектированию координат ее проекций в плоскости проекций камер (хт,, ут,, хт„, ут„ ) и последующему решению системы (1) относительно Хм, Yм, Zм. Все остальные переменные определяют при калибровке камер [6].
Детектирование координат хт,, ут,, хт„, ут„ проводят путем анализа стереопары — пары изображений объекта измерений, полученных с разных точек съемки в один и тот же момент времени или в разные, но при условии сохранения объектом положения относительно камер. Точки т', т" называют сопряженными, поскольку они являются проекциями одной точки пространства.
При возникновении погрешностей в процессе выявления точек т', т" систему (1) также можно решать в матричной форме по методу наименьших квадратов, однако в полученном результате будет содержаться погрешность из-за высокой невязки найденных координат. Вычисление этой невязки требуется при оценке качества идентификации сопряженных точек. В общем случае невязки определяют как
Дг = ^(* N - X ¿)2 + (у N - У о )2 +1(х N - X О)2 + (у N - У о)2, (2)
где х N, у ^^ и х у NN — расчетные координаты точек проекции левой и правой камер, полученные подстановкой в (1 ) измеренных координат Хм, Yм, Zм и калибровочных параметров камер; хд, уд, хд, уд — распознанные на изображениях координаты сопряженных точек.
Сложность распознавания сопряженных точек состоит в необходимости применения трудоемких алгоритмов корреляционного анализа изображений и технологий машинного зрения, основной недостаток которых, кроме высокой трудоемкости, иногда связан с невозможностью идентификации сопряженных точек даже теоретически. Например, при исследовании объектов, имеющих поверхность без какой-либо выраженной текстуры, для идентификации необходимо применять дополнительные технологии. Чтобы решить эту задачу в процесс измерений следует ввести априорную информацию об искомых проекциях в пространстве изображений, в частности о специальной подсветке объекта. Тогда анализ изображений будет ориентирован на поиск участков объекта, подсвеченных в момент съемки.
Световые маски могут иметь разные формы, но одна из наиболее удобных в обработке — вертикальная или горизонтальная линия, спроецированная на объект измерений. При условии, что ширина линии на поверхности объекта составляет менее 1 мм, можно использовать подход, осно-
ванный на поиске срединных точек линии в сечениях, перпендикулярных этой линии. Так, если применяют подсветку с вертикальной линией, то алгоритм обработки растрового изображения заключается в поиске наиболее яркой точки в каждой строке. В случае, когда в строке выявляется более одного пиксела максимальной яркости, целесообразно провести оценку расстояния между крайними пикселами с максимальной яркостью и, если оно не превышает порогового значения, вычислить координаты центра масс указанной зоны в строке.
Полученные массивы точек в пространствах правого и левого снимков можно попарно проверить на сопряженность, использовав в качестве критерия выражение (2), и назначив максимальное пороговое значение Лг, при котором пару точек еще можно считать сопряженной. Такое порогово
Для дальнейшего прочтения статьи необходимо приобрести полный текст. Статьи высылаются в формате PDF на указанную при оплате почту. Время доставки составляет менее 10 минут. Стоимость одной статьи — 150 рублей.