ПРОБЛЕМЫ МАШИНОСТРОЕНИЯ И НАДЕЖНОСТИ МАШИН
< 3, 2004
ЭКСПЕРИМЕНТАЛЬНАЯ МЕХАНИКА, ДИАГНОСТИКА,
ИСПЫТАНИЯ
УДК 621.81-25.001.4
© 2004 г. Митенков Ф.М., Кодочигов Н.Г., Востоков B.C., Друмов В.В., Друмов И.В., Ходыкин A.B.
РАСЧЕТНО-ЭКСПЕРИМЕНТАЛЬНЫЕ ИССЛЕДОВАНИЯ ЭЛЕКТРОМАГНИТНОГО ПОДШИПНИКА С ДОПОЛНИТЕЛЬНЫМ
ЭЛЕКТРОМАГНИТОМ
Излагаются материалы исследования электромагнитного подшипника с дополнительным электромагнитом, предназначенным для демпфирования колебаний ротора без запаздывания по времени. Расчетно-экспериментальным путем исследуются области удержания ротора в заданных границах при включении и без включения дополнительного электромагнита.
Отличительной особенностью роторов турбомашин, имеющих компрессоры и турбины большой мощности, является наличие резонансов в рабочем диапазоне частот вращения. Амплитуда колебаний ротора на резонансной частоте может привести к тому, что будет иметь место касание ротором конструктивных элементов статора не только в районе страховочных подшипников, но и в районе лопаток турбины, что неприемлемо. Увеличение рабочих скоростей вращения у современных турбомашин, повышенные требования к диапазону допустимых амплитуд колебаний ставят вопросы, связанные с повышением эффективности демпфирования колебаний ротора, в частности с возможной организацией самодемпфирования ротора (т.е. демпфирования без специальной системы датчик - система управления - электромагнит).
Существует ряд традиционных методов демпфирования колебаний ротора на электромагнитных подшипниках. Эти методы в основном используют зависимость собственных частот ротора от параметров настройки системы управления (например, от жесткости или демпфирования) и зависимость амплитуды колебаний от коэффициента демпфирования в системе управления [1-4]. Основным ограничением данных методов является наличие строго определенного допустимого диапазона изменения параметров системы управления с учетом реальных временных запаздываний системы управления (датчик, контроллер, электромагнит). В связи с этим более перспективной может стать система электромагнитного подвеса с самодемпфированием (без временных запаздываний).
При колебаниях ротора в обмотке электромагнита наводится электродвижущая сила самоиндукции, которая пропорциональна скорости перемещения ротора. Это приводит к изменению тока через обмотку. В силовых каскадах усилителей электромагнитных подшипников традиционно используются схемы для поддержания тока, кото-
4* 99
рые в максимально возможной степени компенсируют инерционность электромагнита, а также стараются скомпенсировать отклонение величины тока от заданного, исключая эффект самодемпфирования.
Можно организовать специальный дополнительный контур (источник постоянного напряжения, к которому подключен дополнительный электромагнит), в котором токи Фуко не будут компенсироваться системой управления. В этом случае появляется новое свойство электромагнитного подшипника - самодемпфирование. Данное решение достаточно широко используется в технике. Например, существуют реле времени с коротко замкнутым витком на основном магнитопроводе или его части, за счет этого же эффекта обеспечивается сдвиг фазы в однофазных электродвигателях с короткозамк-нутым витком и т.д.
Основные преимущества формирования такого механизма демпфирования по сравнению с традиционным демпфированием через систему управления следующие: возможность демпфировать колебания ротора без запаздывания по времени (внутреннее присущее демпфирующее свойство системы); отсутствие усиления помех с датчиков перемещения; уменьшение мощности выходных каскадов; увеличение области устойчивости в области параметров системы управления.
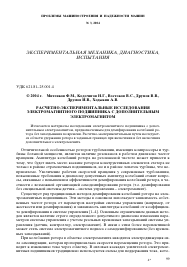
Описание электромагнитного подшипника с дополнительным магнитом. По данной схеме реализована система управления осевого электромагнитного подшипника макета ротора на полном электромагнитном подвесе [5]. Осевой электромагнитный подшипник макета (рис. 1) представляет собой стандартную конструкцию, которая состоит из двух пар катушек (верхней и нижней). При этом один электромагнит запитывает-ся через систему управления, а второй - от источника постоянного напряжения. Быстродействие системы зависит от величины питающего напряжения электромагнита, так как электромагнит обладает определенной индуктивностью. Чем больше напряжение, тем больше по величине и быстрее установится тяговое усилие. Поэтому в системе управления реализован релейный регулятор тока в электромагните. Релейный регулятор в зависимости от соотношения управляющего напряжения иупр и напряжения обратной связи по току подает на обмотку электромагнита напряжение питания. Реализованный в усилителе релейный переключатель имеет зону поддержания.
Для обоснования предложенного решения использовали расчеты по программе, основанной на математической модели ротора в предположении его жесткости в координатах центра масс и углов прецессии и нутации. Математическая модель ротора представлена в [6]. В модели системы управления используется независимое пропорционально-дифференциальное регулирование (коэффициенты кп и кд) по координатам ротора в плоскости датчиков.
Реализовано математическое описание сил от электромагнитного подшипника [7] Р = ¿В - ¿Н - mg - ЩгШ), ^ = ад/2) [/эм в/($, - г)]2, Рн = ад/2)[/эм н/(^ + г)]2, где к - коэффициент, учитывающий собственное демпфирование, вызванное использованием дополнительного электромагнита; Р - сила от электромагнитного подшипника; РВ, РН - сила от верхнего и нижнего основного электромагнита соответственно; /эм В, -4м Н - ток в верхнем и нижнем основном электромагните соответственно; г - перемещение ротора по вертикальной оси; Ь0 - индуктивность основного электромагнита при центральном расположении ротора; - эффективный зазор; g - ускорение свободного падения; т - масса ротора.
В расчетах использованы проектные конструктивные данные по макету ротора на полном электромагнитном подвесе. Граничные значения коэффициентов системы управления кп и кд определяли следующим образом. Задавали определенное значение кп. Путем вариации коэффициента кд определяли граничные точки, при которых амплитуда колебаний ротора достигала 0,4 мм - зазор до страховочного подшипника. Далее значение коэффициента кп меняли и процедуру вариации значений кд повторяли.
В результате была получена некоторая область удержания ротора в заданных границах в пространстве параметров системы управления электромагнитных подшипников. Внутри области отклонение ротора <0,4 мм, а вне области >0,4 мм.
2
1
(k„, k„)
Рис. 1. Схема подключения дополнительного электромагнита: 1 - система управления, 2 - источник постоянного напряжения, 3 - регулятор тока, 4,5 -верхний и нижний основной электромагнит соответственно, 6, 7 - верхний и нижний дополнительный электромагнит соответственно, 8 - ротор
кд, Вс/мм \
0,14 0,10 0,06
I
0,02 0
4 8 12 16 20 кп, В/мм
Рис. 2. Расчетные (пунктирные) и экспериментальные (сплошные) области удержания ротора в осевом электромагнитном подшипнике при включении и без включения дополнительного электромагнита: 1, 2 - дополнительный электромагнит выключен и включен соответственно; РТ - рабочая точка
U„
U„
6
JOS
8
7
3
4
5
2
По приведенной схеме построены экспериментальные области удержания ротора в заданных границах. Перед испытаниями к обмоткам дополнительного электромагнита были подключены независимые источники постоянного напряжения, рассчитанные на максимальный ток 1А. Один источник был подключен к верхней, а другой к нижней обмотке дополнительного электромагнита (рис. 1; U = const, I = 1A).
Результаты расчетных (при значении коэффициента k = 4,3 Нс/мм) и экспериментальных исследований приведены на рис. 2. Видно, что экспериментально полученная граница области удержания в заданных границах при включении дополнительного осевого электромагнита значительно больше границы без включения по kR и kH (допустимый коэффициент пропорционального регулирования увеличивается с 7,7 до 18,7 В/мм).
Численные расчеты и эксперименты подтвердили эффективность использования дополнительного электромагнита для самодемпфирования колебаний ротора.
СПИСОК ЛИТЕРАТУРЫ
1. Позняк ЭЛ. Колебания роторов. Вибрации в технике. Т. 3. М.: Машиностроение, 1980. С. 130-189.
2. Фролов КВ. Уменьшение амплитуды колебаний резонансных систем путем управляемого изменения параметров // Машиноведение. 1965. < 3. С. 38-42.
3. Zhang X., Markert R. Active beeinnflussung von magnetgelagerten elastishen rotoren mit adaptiven regelverfahren // 5. Workshop Magnetlagertechnik. Zittau-Kassel. 20-21 September 2001. P. 51-58.
4. Stegemann H, Worlitz F., Hampel R. Fuzzy-control application for active magnetic supported drives // Proceeding 5 Zittau Fuzzy-Colloquium. 4-5 September. 1997. P. 139-148.
5. Mitenkov F.M., Kodochigov N.G., Drumov V.V., Belov S.E., Vostokov V.S., Drumov I.V., Kloch-kov O.B., Khodykin A.V. Electromagnetic suspension of vertical turbomacine for nuclear power plant // Proceedings: International Conference "Physics and Control". Saint Petersburg. Russia. 2003. P. 146-151.
6. Митенков Ф.М., Кодочигов Н.Г., Востоков B.C., Горбунов B.C., Моторов Б.И., Ходы-кин A.B. и др. О методике испытаний модели вертикального ротора с электромагнитными подшипниками и переносе результатов испытаний на натуру // Проблемы машиностроения и надежности машин. 2001. < 2. С. 93-97.
7. Schweitzer G, Bleuler H, Traxler A. Active magnetic bearings. Basics, properties and applications of magnetic bearings. Zurich: 1994 vdf Hochschulverlag AG an ETH. P. 63-65.
Нижний Новгород Поступила в редакцию 17.XII.2003
Для дальнейшего прочтения статьи необходимо приобрести полный текст. Статьи высылаются в формате PDF на указанную при оплате почту. Время доставки составляет менее 10 минут. Стоимость одной статьи — 150 рублей.