Шадрин С.С., кандидат технических наук, доцент
Иванов А.М., доктор технических наук, профессор, зав. кафедрой, проректор
Солнцев А.Н., кандидат технических наук, профессор
(Московский автомобильно-дорожный государственный технический университет (МАДИ))
РАЗРАБОТКА АВТОМОБИЛЬНОЙ СИСТЕМЫ V2I МОНИТОРИНГА СОСТОЯНИЯ
ДОРОЖНОГО ПОКРЫТИЯ
В статье описывается разработка системы мониторинга состояния дорожного покрытия с помощью автотранспортных средств (АТС), оборудованных пневматической подвеской, и применения технологии интеллектуальных транспортных систем (ИТС) V2I (Vehicle-to-Infrastructure). Приводятся результаты проведенного натурного эксперимента.
Ключевые слова: автомобиль, пневматическая подвеска, ИТС, V2V, V2I, измерение ровности дорожного покрытия, IRI.
V2I AUTOMOTIVE SYSTEM OF MONITORING OF ROAD SURFACE CONDITION
DEVELOPMENT
The article describes the development of system of road surface condition monitoring with the usage of road vehicles, equipped with air suspension, and V2I (Vehicle-to-Infrastructure) technology of intelligent transport systems (ITS). The results of the full-scale experiment are presented.
Keywords: vehicle, air suspension, ITS, V2V, V2I, road surface slickness measurement, IRI.
Введение
По статистическим данным ГИБДД примерно 10...15% ДТП происходят по причине неудовлетворительного состояния дорожного покрытия. Используемые в настоящее время методы определения ровности дорожного покрытия предполагают использование дорожных лабораторий, участие квалифицированных рабочих, частичное или полное перекрытие дорог на время проведения измерений.
Предлагаемая система мониторинга может устанавливаться на любой автомобиль, оснащённый пневматической подвеской, навигационной системой и модулем связи V2V/V2I (технология DSRC - США, G5 - Европа) и не требует в своей работе участия водителя. Применение же технологий ИТС V2V (Vehicle-to-Vehicle) и V2I позволит в режиме реального времени отправлять данные о неудовлетворительном качестве дорожного полотна соответствующим службам, а также другим участникам дорожного движения, что потенциально позволит снизить риски возникновения ДТП, а также стоимость содержания дорог общего пользования за счет проведения своевременных ремонтных работ.
Принцип работы системы
Принцип работы системы заключается в косвенном определение ровности дорожного покрытия на основании показаний датчиков высоты пневматической подвески автомобиля, получаемых в реальном времени с бортовой мультиплексной шины передачи данных CAN. В качестве оценочного показателя предлагается использование международного индекса ровности IRI (International Roughness Index) [1], выражаемого в размерности мм/м или м/км. Показатель, эквивалентный IRI, рассчитывался на каждых 10 м пройдённого пути, и, в случае превышения установленного критического значения, отправлялся вместе с географическими
координатами дорожного участка в динамическую беспроводную сетевую среду ИТС с помощью технологии V2V/V2I [2].
В качестве объекта испытаний было выбрано транспортное средство категории М1, оборудованное в штатной комплектации пневматической подвеской - автомобиль Land Rover Discovery 3, 2009 года выпуска. Для подключения к высокоскоростной бортовой шине передачи данных CAN использовался декодер «NI-8473s», обработка и расчет данных осуществлялись в реальном времени в среде MatLab Simulink с использованием модуля Vehicle Network Toolbox (№ лицензии МАДИ 925024 MathWorks).
Индивидуальные значения датчиков высоты пневматической подвески не относятся к стандартизованным параметрам OBD и, соответственно, не могут быть получены с помощью отправки стандартных диагностических запросов, однако, известно, что рассматриваемые данные присутствуют в общем трафике бортовой шины HS CAN [3]. Для решения обратной инженерной задачи (декодирования данных) было применено ноу-хау МАДИ «Методика декодирования данных, передаваемых по CAN-шинам транспортных и технологических машин».
В архитектуре сети рассматриваемого автомобиля применены 29-битные идентификаторы сообщений CAN. Значения датчиков высоты пневматической подвески передаются в сообщениях с идентификатором «12E9E6A0» (hex - шестнадцатеричный формат): заднего левого колеса - во 2 байте; заднего правого - в 4 байте; переднего правого - в 6 байте и переднего левого датчика - в 8 байте. Масштабный коэффициент для перевода значений в инженерные с единицей измерений «мм» составляет «1», смещение «-200». Сообщение обновляется в сети HS CAN примерно каждые 15 мс, т.е. частота дискретизации получаемых данных составляет примерно 67 Гц.
Определение ровности дорожного покрытия
Предположим, что места креплений четырех датчиков высоты пневматической подвески к кузову автомобиля лежат в одной плоскости. Тогда для автомобиля, движущегося по ровной горизонтальной опорной поверхности, при отсутствии перемещений центров колес относительно дороги в вертикальном направлении, будет справедливо следующее выражение:
h1-h2+h3-h4=0 (1) где: h - значения датчиков высоты пневматической подвески;
индексы 1...4 - переднее левое, переднее правое, заднее правое, заднее левое колеса по ходу движения автомобиля.
В таком случае, все значения выражения (h1-h2+h3-h4), отличные от нуля, будут являться суммарными оценочными неровностями дорожного покрытия под автомобилем.
Далее введем понятие усредненной оценочной неровности дорожного покрытия при проезде автомобиля, обозначив Н:
Н=0.25*|Л1-Л2+Л3-Л4| (2)
Значения (h1-h2+h3-h4) взяты по модулю, так как они могут принимать как положительные (лежачий полицейский), так и отрицательные (выбоина) значения. Таким образом, показатель ровности дорожного полотна, эквивалентный IRI, рассчитывался по формуле:
/tf/3 = J>dt/(t-J0Vdt) (3)
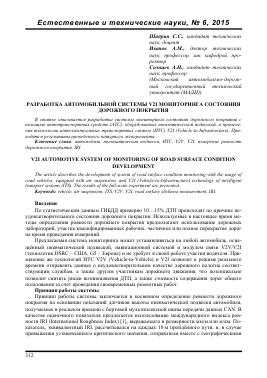
Дорожные испытания проводились на Ленинградском проспекте напротив д.64 (МАДИ). Результат расчетного эквивалентного показателя IRI в функции пройденного пути на участке в 500 м показан на Рисунке 1.
Рис.1. Эквивалентный индекс ровности, Ленинградский проспект
Результаты и выводы
В результате проведенных дорожных испытаний на Ленинградском проспекте в Москве был получен средний показатель ровности дорожного полотна, эквивалентный IRI, со значением 2.2 м/км. Отметим, что по данным Росавтодора на рассматриваемом участке дороги IRI=2 м/км. В действительности, сравнение данных показателей не является корректным ввиду принципиальных отличий в подходах к измерениям и расчетам, однако, сама концепция применения технологий ИТС и автотранспортных средств, находящихся в эксплуатации, для мониторинга состояния дорог может оказаться перспективной и представлять интерес как направление дальнейших исследований.
ЛИТЕРАТУРА
1. СТО МАДИ 02066517.1-2006 Дороги автомобильные общего пользования. Диагностика. Определение продольного микропрофиля дорожной поверхности и международного показателя ровности IRI. Общие требования и порядок проведения. - М.: МАДИ, 2006. - 39 с.
2. Иванов, А.М. Разработка системы межобъектного взаимодействия интеллектуальных транспортных средств / А.М. Иванов, С.С. Шадрин // Известия ВолгГТУ. Серия «Наземные транспортные системы». Вып. 7: межвуз. сб. науч. ст. / ВолгГТУ. - Волгоград, 2013. - № 21 (124). - C. 74-77.
3. Шадрин, С. С. Возможности использования бортовых сетей передачи данных автотранспортных средств в задачах интеллектуальных транспортных систем / С.С. Шадрин, А.М. Иванов // Автотранспортное предприятие. - 2014. - № 5. - C. 43-46.
Для дальнейшего прочтения статьи необходимо приобрести полный текст. Статьи высылаются в формате PDF на указанную при оплате почту. Время доставки составляет менее 10 минут. Стоимость одной статьи — 150 рублей.