ВЕСТНИК ЮЖНОГО НАУЧНОГО ЦЕНТРА Том 10, № 2, 2014, стр. 9-15
МАТЕМАТИКА И МЕХАНИКА
УДК 539.3:534.1
РЕКОНСТРУКЦИЯ ДЕФЕКТА НА ПОВЕРХНОСТИ ТРУБ С ПОМОЩЬЮ СОЧЕТАНИЯ МЕТОДА КОНЕЧНЫХ ЭЛЕМЕНТОВ И ИСКУССТВЕННЫХ НЕЙРОННЫХ СЕТЕЙ
© 2014 г. А.Н. Соловьев12, З.Ч.З. Нгуен2
Поступила 25.12.2013
В работе рассматривается решение обратной задачи идентификации дефектов на внешней или внутренней поверхности трубы. Дефекты моделируются областями прямоугольного осевого сечения, в которых отсутствует материал, причем одна сторона сечения выходит на поверхность. Математическая модель конструкции строится в рамках линейной теории упругости. Проблема сводится к геометрической обратной задаче, в которой идентификации подлежат размеры дефекта или его объем. Дополнительной информацией для решения обратной задачи являются амплитудно-временные характеристики компонентов вектора смещений, измеренные в некоторых точках на внешней поверхности трубы. При этом рассматривается конечный фрагмент трубы, поэтому радиальное и осевое смещение измеряется в течение времени, когда волны, отраженные от концов отрезка трубы, не успевают прийти на приемник. Решение обратной задачи основано на сочетании метода конечных элементов и искусственных нейронных сетей. Процесс измерения смещений в работе моделируется нестационарным расчетом в конечно-элементном пакете ANSYS. В качестве входных данных для обучения нейронной сети используется как непосредственно фрагмент амплитудно-временной характеристики смещений, так и его образ, полученный с помощью быстрого преобразования Фурье. Используемые в работе искусственные нейронные сети являются сетями прямого распространения, процесс их обучения основан на алгоритме обратного распространения ошибки. В приведенном численном примере рассмотрена стальная труба, внешний радиус которой составляет 0,2 м, а толщина 0,02 м, возбуждение волн производится кратковременным действием силы, измеряется сигнал, отраженный от дефектов, которые в соответствии с размерами условно разделены на три класса. В работе исследуются вопросы точности определения параметров дефекта в зависимости от вида входных данных, архитектуры нейронной сети и длительности процесса ее обучения. Полученные результаты свидетельствуют об эффективности предлагаемого подхода.
Ключевые слова: дефект трубы, конечно-элементный анализ, формы колебаний, быстрое преобразование Фурье, искусственные нейронные сети.
ВВЕДЕНИЕ
Реконструкция дефектов в трубопроводах, вызванных механическим воздействием или коррозией, является важной технической проблемой, успешное решение которой может предотвратить разрушение труб. Такую идентификацию можно осуществить с помощью приборов, которые двигаются вдоль трубопровода и осуществляют их мониторинг. Более привлекательным способом об-
1 Южный научный центр Российской академии наук (Southern Scientific Center of the Russian Academy of Sciences), 344006, г. Ростов-на-Дону, пр. Чехова, 41; e-mail: solovievarc@ gmail.com
2 Донской государственный технический университет (Don State Technical University), 344000, г. Ростов-на-Дону, пл. Гагарина, 1; e-mail: giangvmu@gmail.com
наружения является использование акустических датчиков и приемников, установленных на трубе и обнаруживающих повреждение на основе отраженных сигналов от дефектов. Такая система должна быть снабжена программным обеспечением (ПО), позволяющим по анализу отраженного сигнала идентифицировать повреждение и его степень. Соответствующее ПО может быть разработано на основе использования искусственной нейронной сети (ИНС) [1]. Применение ИНС в задачах реконструкции поврежденного состояния элементов конструкций описано в работах [2-8]. Применение различных архитектур и алгоритмов ИНС описано в работах [2-6]. Определению дефектов в анизотропных пластинах с помощью ИНС посвящена работа [7]. В работе [8] авторы указали преимущества
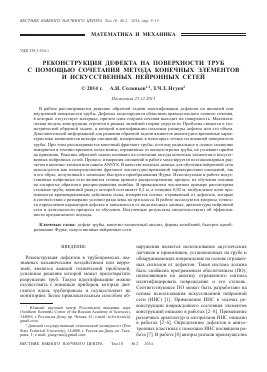
/77777/
Дефект
; Датчик и импульс I
Z'-X1
Рис. 1. Модель трубы с дефектом
ANSYS. Обученная сеть, получив уже новые, неизвестные ранее результаты анализа, способна корректно распознать параметры дефекта. Входные данные для обучения ИНС могут быть преобразованы с помощью быстрого преобразования Фурье (БПФ) [11], что улучшает процесс реконструкции. В работе исследованы вопросы архитектуры ИНС, способов представления обучающей информации и влияние размеров дефектов на точность и время идентификации дефектов.
КОНТИНУАЛЬНАЯ И КОНЕЧНО-ЭЛЕМЕНТНАЯ ПОСТАНОВКА ЗАДАЧИ
методов идентификации, в которых не требуется предварительного построения математической модели объекта исследования. Проблема возбуждения и распространения волн в полом цилиндре, которые служат источником дополнительной информации для задачи идентификации, рассматривается в работе [9].
В настоящей работе разрабатывается метод реконструкции поверхностных дефектов в трубах. Математически проблема сводится к обратной геометрической задаче теории упругости [10]. Предполагается, что дефекты расположены на внешней или внутренней поверхности трубы и имеют осе-симметричную конфигурацию. Нестационарный акустический сигнал возбуждается датчиком, находящимся на некотором расстоянии от дефекта, приемник расположен там же, где и датчик. Поставленная задача решается в осесимметричной постановке с помощью метода конечных элементов (МКЭ). С этой целью построена конечно-элементная модель фрагмента трубопровода (рис. 1) в пакете ANSYS. Отраженный от дефекта сигнал в виде амплитудно-временной характеристики (АВХ) радиального и осевого смещений измеряется в течение времени, когда волны, отраженные от концов отрезка трубы, не успевают прийти на приемник; таким способом моделируются реальные условия протяженного трубопровода.
Анализ измеренных АВХ показывает возможность их использования в обратных задачах восстановления дефектов. В качестве инструмента решения обратной задачи реконструкции параметров дефекта используется ИНС. Популярность использования ИНС обусловлена тем, что они изначально проектировались для решения именно таких задач, для нахождения нелинейных зависимостей в многомерных массивах данных. ИНС, в отличие от других алгоритмических конструкций, не программируются, а обучаются на множестве данных для различных параметров дефекта. Обучающие выборки строятся путем решения прямых задач в
Напряженно-деформированное состояние трубы исследуется в рамках осесимметричной задачи линейной теории упругости. Фрагмент трубы занимает в цилиндрической системе координат
(r*, 6, z*) область X: r - -у < r* < r + , 0< 6 < 2r,
0< z* < l. Рассматривается случай, когда нижняя торцевая плоскость z* = 0 закреплена, верхняя торцевая плоскость и внутренняя цилиндрическая поверхность свободны от напряжений, внешняя поверхность трубы также свободна от напряжений, а в месте расположения датчика действует осесиммет-ричная динамическая нагрузка (нормальные сила)
F(z* , t) = F0( t) ) ôez* - 20, границы дефектов,
расположенных на внутренней и внешней поверхностях трубы, также свободны от напряжений.
В общем случае дифференциальные уравнения осесимметричного движения однородной упругой среды в цилиндрической системе координат записываются в виде [12]
dVrr , dVrz , Vrr - V66 d2 U*
dr* dz„
dVrz , dazz 6rZ
- P-
= 0,
dr ^ ôz* i ^
+—-p r
dt: d2 w * dt 2
(1)
= 0,
Уравнения состояния следующими равенствами [12]:
vrr C11
= C,
Vz = C,
du* , U* с 12 r*
dr*
DU* , U* -с „ — r*
dr*
i dU* , u * 0
3 e dr* r*
=с „ e dw* ,
\ dr*
C
dw *
13
C1
+C
dz*
dw *
3 dz*
dw *
(2)
rz
РЕКОНСТРУКЦИЯ ДЕФЕКТА НА ПОВЕРХНОСТИ ТРУБ
11
В соотношениях (1), (2) г* - время, V}-к (г* , г* , г* ),
и*(г* , г* , г*), Ж*(г* , г* , г* ) - соответственно компоненты тензора механических напряжений (/, k = г, 6, г), радиальное и осевое перемещения; р, Ст5 - объемная плотность и модули упругости (т, s = 1, 2, 3, 4, 5), далее рассматривается изотропный материал трубы, для которого С11 = С33 = = А + 2п, С12 = С13 = А, С55 = п, где А, п - параметры Ламе.
Граничные условия задачи имеют следующий вид:
при г* = 0
и * = Ж * = 0,
при г* = I
*г
при г* = г - —
при г* = г
= бгг = 0,
^гг = вгг = 0,
(3)
^гг = г)$8^г* -убгг = 0.
Начальные условия соответствуют недеформи-рованной трубе, находящейся в покое; при г* = 0
и * = Ж * = 0
ди* дж*
дг* дг*
= 0.
(4)
Соотношения (1)-(4) представляют собой математическую формулировку рассматриваемой начально-краевой задачи теории упругости. Решение задачи (1)-(4) проводится методом конечных элементов, реализованном в пакете ANSYS. Далее в тексте, на графиках и в таблицах координате X соответствует координата г*, координате У соответствует г*, смещению их соответствует смещение и*, смещению иу соответствует Ж*.
МОДЕЛЬ ТРУБЫ С ДЕФЕКТОМ И ОБРАБОТКА ДАННЫХ
Для обучения ИНС решаются прямые нестационарные задачи для фрагмента трубы (рис. 1, справа) с дефектом, который имеет прямоугольную форму в осевом сечении размером ёг х ё1 (рис. 1, слева и в центре), где длина трубы I = 2 м, внутренний радиус верхней трубы г = 0,19 м, толщина трубы гг = 0,02 м, расстояние от датчика до дефекта 5 = 0,5 м. С этой целью в пакете ANSYS была построена осесимметричная конечно-элементная модель. При расчетах принимались следующие
Рис. 2. Распределение радиального смещения
значения модуля Юнга: Е = 2,0 • 1011 мПа, плотность р = 7800 кг/м3, коэффициент Пуассона: о = 0,3.
Возбуждение волн осуществляется приложением в датчике радиальной силы со ступенчатой зависимостью от времени (продолжительность действия составляла 1 •10-6 с). В качестве измеряемой информации выступают АВХ радиального и осевого смещений на поверхности трубы в точке приложения силы (датчик на рис. 1). Измерение отраженного от дефекта сигнала производилось на отрезке времени [г1, г2], для которого волны, отраженные от торцов трубы, не достигли датчика (г 1 = —, г 2 = —,
V V
Дг = г2 - г1, где I - длина трубы; V - скорость сигнала; 5 - расстояние от датчика до дефекта).
На рисунке 2 показано распределение радиального смещения в осевом сечении трубы для разных значений времени (начало распространения слева, волновой фронт достигает дефекта в цен
Для дальнейшего прочтения статьи необходимо приобрести полный текст. Статьи высылаются в формате PDF на указанную при оплате почту. Время доставки составляет менее 10 минут. Стоимость одной статьи — 150 рублей.