МЕХАНИКА ТВЕРДОГО ТЕЛА № 4 • 2014
УДК 539.3
© 2014 г. Г. М. КУЛИКОВ, С. В. ПЛОТНИКОВА
РЕШЕНИЕ ТРЕХМЕРНЫХ ЗАДАЧ ДЛЯ ТОЛСТЫХ УПРУГИХ ОБОЛОЧЕК НА ОСНОВЕ МЕТОДА ОТСЧЕТНЫХ ПОВЕРХНОСТЕЙ
Рассмотрен новый метод решения задач теории упругости для толстых и тонких оболочек в пространственной постановке. Метод основан на концепции отсчетных поверхностей внутри оболочки. Согласно этому методу в теле оболочки вводятся N отсчетных поверхностей, параллельных срединной поверхности и расположенных в узлах многочлена Чебышёва, для
того чтобы выбрать векторы перемещений этих поверхностей и1, и2,..., иж в качестве искомых функций. Такой выбор искомых функций позволяет представить разрешающие уравнения предложенной теории оболочек высокого порядка в достаточно компактной форме и получить деформационные соотношения, которые корректно описывают перемещения оболочки как жесткого тела.
Ключевые слова: теория упругости, теория оболочек высокого порядка, метод отсчетных поверхностей.
1. Введение. Традиционный путь построения теории оболочек состоит в разложении перемещений в степенные ряды относительно поперечной координаты 93, отсчитываемой вдоль внешней нормали к срединной поверхности. Для приближенного представления поля перемещений можно воспользоваться конечными отрезками степенных рядов, поскольку основная цель теории упругих оболочек состоит в получении приближенных решений задач трехмерной теории упругости. Идея этого подхода восходит к Коши [1]. Однако кажущееся преимущество этой теории теряется при ее применении в задачах статики толстых упругих оболочек, в которых для получения приемлемых результатов необходимо удерживать достаточно большое число членов в соответствующих разложениях.
Более продуктивный подход связан с введением в теле оболочки отсчетных поверхностей И ,И ,...Д2 , параллельных срединной поверхности, с целью использования векторов перемещений этих поверхностей в качестве искомых функций [2, 3]. Такой выбор искомых функций с последующим использованием полиномов Лагранжа степени N -1 в пространственных аппроксимациях перемещений позволил представить разрешающие уравнения предложенной теории оболочек высокого порядка в достаточно компактной форме и построить деформационные соотношения, которые точно представляют перемещения оболочки как жесткого тела в системе криволинейных поверхностных координат. Однако доказательство этого фундаментального утверждения представлено не было. Отметим также, что идея метода отсчетных поверхностей восходит к работам [4—9], в которых на основе введения лицевых поверхностей оболочки О-, в качестве отсчетных построены различные варианты геометрически линейной и нелинейной теорий оболочек.
Теория оболочек высокого порядка [2, 3] основана на использовании эквидистантных отсчетных поверхностей, при этом лицевые поверхности оболочки выбираются в качестве отсчетных. Это ограничивает применение данной теории для расчета толстых оболочек. Дело в том, что предложенная пространственная полиномиальная интерполяция вектора перемещений с использованием полиномов Лагранжа высокой степени может приводить вследствие феномена Рунге к значительной осцилляции полиномиальных аппроксимаций в зоне краевого эффекта. Этот феномен был открыт в [10] при изучении погрешности полиномиальной интерполяции для приближения некоторых функций на равномерной сетке. С возрастанием степени полинома погрешность интерполяции может стремиться к бесконечности. В численном анализе для борьбы с указанным явлением в качестве узлов интерполяции принято использовать корни многочлена Чебышёва [11], что помогает существенно улучшить поведение полиномиальных аппроксимаций высокой степени, для которых ошибка интерполяции стремится к нулю при N ^ да. Это дает возможность находить решение трехмерных задач статики для толстых оболочек с любой наперед заданной точностью при достаточно большом числе отсчетных поверхностей.
2. Кинематика оболочки. Рассмотрим оболочку постоянной толщины h. Отнесем срединную поверхность Q к криволинейным ортогональным координатам 9Ь 92, отсчитываемым вдоль линий главных кривизн, а координату 93 будем отсчитывать в поперечном направлении. Базисные векторы срединной поверхности оболочки имеют вид
a а = г,а = Aaea, аз = ез (2.1)
где г = г (9i, 92) — радиус-вектор срединной поверхности; Aа (6i, 92) — коэффициенты первой квадратичной формы; еа (91,92) — единичные векторы касательных к координатным линиям 9а; е3 (91,92) — единичный вектор внешней нормали к срединной поверхности. Отметим, что в статье соглашение о суммировании по повторяющимся индексам не применяется.
Пусть R = г + 93е3 — радиус-вектор оболочки, тогда базисные векторы в теле оболочки можно представить в форме
g а = R,a = Аасае ^ §3 = R,3 = е3 (2.2)
где ca = 1 + ka93 — компоненты геометрического тензора сдвига; ka — главные кривизны.
Обозначим через R1 = г + 93 е3 радиус-векторы отсчетных поверхностей Q7, которые располагаются внутри интервала (-h/2, h/2) в узлах полинома Чебышёва степени N, где 93 — поперечные координаты поверхностей Q7, определяемые согласно [11] по формуле
ai h ¡21 -1\ ,ч
93 =— cos In-) (2.3)
3 2 I 2N /
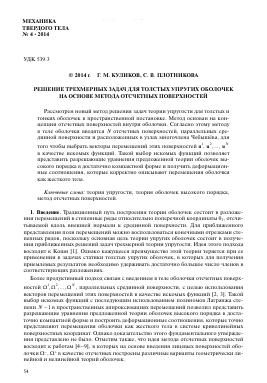
Тогда базисные векторы отсчетных поверхностей, показанные на фиг. 1, имеют вид ga = R3a = Аас1ае a, g1 = ез (2.4)
где c,^ = 1 + ka93 — компоненты геометрического тензора сдвига на поверхностях Q7.
Базисные векторы в теле оболочки в деформированном состоянии находим по формулам
§ = R,i = §i + u,;- (2.5)
где R = R + u — радиус-вектор деформированной оболочки; u — вектор перемещений.
Фиг. 1
Базисные векторы отсчетных поверхностей Q1 в деформированном состоянии представим в форме
gÎ = R 7а = g а + u 7а, ÏÏ37 = g3(03 ) = вз + в 7 (2.6)
u7 = u(03 ), в7 = u ,3(03 ) (2.7)
где R7 = R7 + u7 — радиус-векторы поверхностей Q7 в деформированном состоянии; u7 (0Ь 02) — векторы перемещений поверхностей Q7; в7 (0Ь 02) — значения производной трехмерного вектора перемещений по координате 03 на поверхностях Q7. Здесь и далее индексы I, J, Kуказывают на принадлежность некоторой величины к отсчетной поверхности и принимают значения 1, 2, ..., N; греческие индексы а, Р = 1,2; латинские индексы i, j, k, m = 1, 2,3.
3. Деформационные соотношения. В системе криволинейных ортогональных координат 0, тензор деформаций можно записать в форме [12, 13]:
2s j =~7~7 (g' • gj - gi • g j ) (3Л)
AiAjcicj
где A3 = 1 и c3 = 1. Значения компонент тензора деформаций на отсчетных поверхностях Q1имеют вид
2sj = 2Sj(03) =-1-Т1 (g7 • gj7 - g7 • gj) (3.2)
AiAjci cj
Вводя базисные векторы (2.4), (2.6) в деформационные соотношения пространственной теории упругости (3.2) и пренебрегая нелинейными членами, получим
2еав = —u^а • ев +—Ц"uJ3 • eа
Aaca ^ (3.3)
о 7 а7 1 7 7 „7
2£а3 = в • еа +-7 u,a • вз, Е33 = в • вз
Aaca
Представим далее векторы u7 и ß7 в ортонормированном базисе в,- согласно формулам
u7 = Y, U в, (3.4)
i
ß1 = I ßl в,- (3.5)
i
Из разложения (3.4) с учетом формул дифференцирования базисных векторов в, по криволинейным ортогональным координатам [14]:
— еа,а = ~Baeß - kae3, ~вР,а = Вава
1а 1 а (3.6)
— в3,а = Ма, Ва = Axß Ф ^ а)
следует
у-u'a = Z ^i (3.7)
,7 1 I D I , I ,7 1 I nl/о^ч
Лаа = — Ща,а + Bauß + kau3 > ^ßa = — uß,a - Baua ( P * a) Aa Aa
^3a = "y u3,a - kaUÎ (3.8)
Вводя разложения (3.5), (3.7) в формулы (3.3), приходим к скалярной форме линеаризованных деформационных соотношений
2saß=-7 ^aß+-7 a, 2sa3=ßa+-7s73=ßl (3.9)
cß ca Ca
4. Пространственные аппроксимации перемещений и деформаций. Заметим, что до этого момента не было сделано никаких предположений о характере распределения перемещений и деформаций по толщине оболочки. Пусть перемещения распределены в поперечном направлении оболочки согласно следующему закону [2]:
Щ = S LIuIi (4.1) i
где L1 (ö3) — полиномы Лагранжа степени N -1, определяемые по формуле
L7 = П (4.2)
Û1 Cr
j*I Из - Из
При этом L1 (ÖJ ) = 1, если J = I и L1 (ÖJ ) = 0 если J ф I. Из соотношений (2.7), (3.5), (4.1), (4.2) имеем
ß7 = £ MJ (ö3 )uJ (4.3)
J
где M1 = L73 — полиномы степени N - 2; их значения на отсчетных поверхностях D.1 находим по формулам
MJ ^ )п еНК (J *7 )
е3 -е3 K*I,J e3 -ез (4.4)
M7 (е7 ) = - X MJ (е7 )
J ф1
Таким образом, определяющие функции предлагаемой теории оболочек ß7 представлены в виде линейной комбинации перемещений отсчетных поверхностей и..
Следующий шаг состоит в выборе закона распределения деформаций по толщине оболочки. Очевидно, что распределение деформаций в поперечном направлении должно быть согласовано с распределением перемещений (4.1), т.е. имеем
% = I L7e I (4.5)
I
Теорема. Деформационные соотношения (3.3), (4.5) точно представляют перемещение оболочки как жесткого тела в системе криволинейных поверхностных координат.
Доказательство. Перемещение отсчетной поверхности Q1 как жесткого целого можно представить в виде [15, 16]:
(u7)Rigid = А + Ф х R7 (4.6)
А = £ Аге,, Ф = £ Ф.е. (4.7)
i i
где А — вектор поступательного перемещения оболочки; Ф — вектор вращений. Согласно [14] имеем
А,а = 0, Ф ,а= 0 (4.8)
Из (4.6) с учетом соотношений (2.1), (3.6), (4.8) следует
(u 7a)Rigid = Äac7a Ф X ea (4.9)
Принимая во внимание тождества
£ MJ (03) = 0, £ 0 jmj (03) = 1 (4.10)
j j
которые в свою очередь вытекают из очевидных тождеств
2 LJ (03) = 1, £ qjlj (03> = °3 (4.11)
j j
и учитывая (2.7), (4.1), (4.6), находим
(ß7)Rigid = £ MJ(07)(uJ)Rigid = Ф x e3 (4.12)
j
Вводя (4.9), (4.12) в деформационные соотношения (3.3), получим
2(б j)Rigid = (Ф x e,)e j + (Ф x e j )e;- = 0 (4.13)
что и требовалось доказать.
5. Полная потенциальная энергия. Подставим деформации (4.5) в выражение для полной потенциальной энергии упругого тела [17] и, вводя результирующие напряжений [2]:
А/2
Т1
н1 = | ъ^с^гй9з (5.1)
-А/2
получим
П = Ц 2^Е^Ну£у - Х(с+с2+ р+и+ - сГс2>;ГИ;Г)
О I I /У I
АЛ^^ - (5.2)
где рI, р+ — поверхностные нагрузки, действующие на внутренней и внешней поверх-
ностях оболочки О , О+; и- = щ (-А/2), и+ = щ (А/2) — перемещения поверхностей О , О+; са = 1 - каА/2, с~а = 1 + каА/2 — компоненты геометрического тензора сдвига на по
Для дальнейшего прочтения статьи необходимо приобрести полный текст. Статьи высылаются в формате PDF на указанную при оплате почту. Время доставки составляет менее 10 минут. Стоимость одной статьи — 150 рублей.