МЕХАНИКА
УДК 539.3:539.4.014.13:53.083.2
РЕЗОНАНСНЫЙ МОНИТОРИНГ СТРУКТУРЫ СЛОИСТО-НЕОДНОРОДНОЙ СРЕДЫ
© 2007 г. Т.И. Белянкова1, И.Е. Анджикович1, Д.Н. Шейдаков2
Разработан эффективный метод контроля структуры слоистых композитных материалов. Метод основан на регистрации изменения динамических свойств системы датчик - слоисто-неодно-родная среда.
ВВЕДЕНИЕ
Проблема оценки состояния и прочностного ресурса узлов и деталей является решающей для повышения надежности эксплуатации транспортных средств и оборудования и предотвращения аварийных ситуаций, особенно для изделий, выполненных из композиционных материалов. На стадии производства для контроля качества изготовления деталей широко используются методы акустического контроля. Достаточно полный обзор этих методов, их достоинств и недостатков приведен в работах [1-5]. Однако использование ультразвука накладывает определенные ограничения на структуру композиционных материалов (исключаются, например, сотовые материалы, волокнистые, зернистые), а использование низкочастотных акустических методов [3, 4] - на форму изделий и свойства материала (слабое демпфирование). Использование этих методов для контроля остаточного ресурса узлов и деталей в процессе эксплуатации сопряжено с большими трудностями как принципиального характера, так и аппаратно-измерительного обеспечения.
В настоящей работе предлагается эффективный подход к контролю структуры слоистых композитных материалов, основанный на регистрации изменения резонансных свойств системы датчик - слоисто-неоднородная среда. Преимуществом подобного подхода является его интегральный, основанный на использовании низкочастотных колебаний, характер, что позволяет в значительной мере увеличить кон-
' Научно-исследовательский институт механики а прикладной математики им. И.И. Воровича Южного федерального университета, Ростов-на-Дону.
2 Южный научный центр Российской академии наук, Ростов-на-Дону.
тролируемую одним датчиком площадь и тем самым открывает перспективу создания систем непрерывного мониторинга - дистанционного контроля состояния деталей и узлов, выполненных из слоистых композиционных материалов.
1. МАТЕМАТИЧЕСКАЯ МОДЕЛЬ СИСТЕМЫ ДАТЧИК - СРЕДА
При описании математической модели системы датчик-среда будем полагать, что жесткость контактирующего элемента датчика значительно превышает жесткость материала исследуемого объекта. Такое предположение вполне оправданно для подавляющего большинства реальных ситуаций. Это позволяет в качестве модели датчика использовать жесткий массивный штамп, а в качестве исследуемого объекта - упругую (вязкоупругую) неоднородную (композитную) среду. Для иллюстрации эффективности и информативности предлагаемого подхода к контролю структуры слоистого материала рассмотрим колебания датчика на поверхности составной среды, представляющей собой пакет из двух слоев (слой I - Н2 ^ хъ ^ к2 + = к и слой II - 0 < хъ < /г2), толщина и упругие параметры которых равны соответственно Нь ЯП), ц(и и к2, АЯ, ц(2). Нижняя грань пакета жестко сцеплена с недеформируемым основанием, общая его толщина Л полагается фиксированной. Изменение структуры среды моделируется либо полным сцеплением слоев, либо отсутствием трения между ними. Для прозрачности изложения ограничимся случаем вертикальных поступательных колебаний полосового штампа, занимающего в плане область I х, I < 1,1 1 < оо, колебания полагаем установивши-
мися, трение в области контакта отсутствующим.
Задача сводится к согласованному решению уравнения движения массивного тела
1
-а>2ггт? = Р-Н, Д= / (1.1)
-1
и краевой задачи о колебании слоя, на поверхности которого заданы смешанные условия:
п = иъ(х^к), 1*,1<1, \х21< о®, (1.2) д3(хг) = 0, \х1\>1, 1л:21<оо. (1.3)
Здесь т - масса датчика; и со - амплитуда и частота его колебаний; Р — амплитуда внешней силы, приложенной к штампу, К - амплитуда реактивной силы, действующей на штамп со стороны среды, и3(х}, хъ) - амплитуда перемещения произвольной точки среды, - амплитуда вертикальной компоненты вектора напряжений, возникающих при контакте штампа с основанием.
2. КРАЕВАЯ ЗАДАЧА О КОЛЕБАНИЯХ СЛОИСТО-НЕОДНОРОДНОЙ СРЕДЫ
Рассмотрим задачу о колебаниях слоисто-не-однородной среды, представляющей собой пакет слоев (I) I хх I, I х21 < во, Н2 й х3 < к и (II) I хг I, I 1 < < оо, 0 < х3 < ¡г2, жестко сцепленный с не деформируемым основанием. Будем предполагать, что между слоями имеет место либо полное сцепление (задача (л)), либо отсутствие трения (задача (б)). Действие штампа заменим заданной распределенной нагрузкой ^3(^1)^.
Краевая задача описывается уравнениями движения (п = 1,2)
в задаче (б) - отсутствие трения между слоями
е'з? = - 0' взз = ' "з1* = «з2) • (2-5)
, Э8Й>=р(п>Э2»Г
дх{ Эдг3 Эг2
м® , я®
(2.1)
Эл:1 Эа'з
с граничными условиями: на поверхности среды х3 = И
йО) _
Г I < 1^2 I < оо,
[О, I Х1 1>1, 1лс2
в основании пакета = О
(2.2)
Д2) _
^ =0, и(ъ2) = 0. (2.3)
На границе слоев л3 = /г2 имеют место: в задаче (¿г) - полное сцепление слоев
д(1> _ 0(2)
(1) -„(2)
к: — и
к '
к = 1,3;
(2.4)
В формулах (2.1)-(2.5) приняты следующие обозначения: р("> - плотность материала соответствующего слоя,
= (1{п) + 2\1(п))и{^ + ^^, 0<лз> = \Muff + 2д<">)иЦ,
Учитывая установившийся характер колебаний, будем полагать, что все величины представляются в виде Дх], 0 = /(л-,)ехр(-г'сог), далее экспоненциальный множитель опускается.
В последующем изложении используются безразмерные параметры
/ _ "к
' _ лк
Щ- н.хк- л - т
Р_
(2) '
В качестве безразмерной частоты используется параметр
Р(
х(2)(й2к2
(2)
Далее штрихи опускаем.
3. РЕШЕНИЕ КРАЕВОЙ ЗАДАЧИ
Решение краевой задачи (а) (2.1)—(2.3) и (2.4) либо задачи (б) (2.1)-(2.3) и (2.5) представляется в виде (п = 1, 2) 1
| к{п)(х! -^,хъ,ус2)д3(^,к2)(Я; = и{")(х1,х3),
к{п\х!,х3,х2) = — Г К(п\а,х3,х2)еЧаХ1 ¿¿а,(3.1) 2тс г
¡Л*) _
= ъ К
+Д
*+4{п-1)
2,*+4(я-1)+2
А'.
зЬс!10.-
(3.2)
{¡ф — д0", к,р —1,2,...,8,
А = ск* II71
кр "к,р=1,2,...,8'
(3.3)
где функции А^ (к = 1,2,...,8) являются алгебраическими дополнениями соответствующих
элементов матрицы которые для
задачи (а) имеют вид (к — 1,2)
т1к=1^ chef h, Tuk+2=i^shofh, ^U+4 = ^U+6 = ^2,*+4 = Т2,к+6 = О»
Т2М2=$cho^A, Т3к = sh , TiM2 = /¡?> ch а<%,
3,fc+4 У1Л M1°/t "2» 13,4+6 - Л* ^'(3.4)
= /£>cha<%, Г4Д+2 = /^shoi'V Г4,*+4 =-/А2)сЬа<2)Л2, Г4>,+6 = -/<?> shafv
Г5.*+4 = -42) ch Ъ(к2%, r5i,+6 = -/£> sh , = 4* sh c[l%, T6M2 = chef h,,
W r6Jk+6 = -/£> cha'2^,
Tlk = ^7,*+2 = ¿+4 = ^7,/t+6 = /li2)' 7" — т — т -о т — f(2)
Здесь
Z//0 = -ia(o5n))_1, /1(2-> = -to-Io<2B>.
fi") _ _ 1 J 21 — У22 —
/{¡° = -2ц(л)*а, 4Я) = 2ц(п)юГ1е(л), е(я)
(Л)
pCb)
4. ИНТЕГРАЛЬНОЕ УРАВНЕНИЕ ЗАДАЧИ О ШТАМПЕ
Выражение (3.1) совместно с формулами (3.2)—(3.6) определяет перемещение произвольной точки структурно-неоднородной среды под действием нагрузки ^(Х]). В случае, когда колебания среды инициализируются осциллирующим штампом (датчиком), амплитуда колебаний которого равна , в формулах (3.1), (3.2) необходимо положить д"3 = И, Из1) = И3 :
} зЙ.*2)^ = ИЭ°. (4.1)
кт(х1Лх2) = — I ^(1)(а,/1,х2^",ои^а. (4.2) 2я г
Выражение (4.1) представляет собой интегральное уравнение относительно неизвестной функции распределения контактных напряжений. Функция Я^аЖхз) в представлении (4.2) является мероморфной в комплексной плоскости, имеет конечное, зависящее от частоты множество вещественных нулей и полюсов, что обусловливает осциллирующий характер функции ,х2) и тем самым определяет необходимость использования для решения уравнения (4.1) специальных методов, учитывающих это обстоятельство [6-10]. В настоящей работе для решения используется обобщенный метод факторизации [11, 12], позволяющий с высокой точностью учитывать динамические свойства составной среды и проводить анализ влияния структуры среды на динамику контактирующего с ней штампа.
о[п} удовлетворяют характеристическому урав-
нению
(
а!й)-
№1 Л А,(я) + 2ц(п)
У
-(и) Р 02
= 0. (3.5)
Для задачи (5) изменяется вид элементов в строках с номерами 3 и 5:
= ~ к ~ ^5М2 = (3,6)
5. ВЛИЯНИЕ СТРУКТУРЫ СРЕДЫ НА АМПЛИТУДУ КОЛЕБАНИЙ ДАТЧИКА
Введем в рассмотрение динамическую жесткость среды £)0 - реактивную силу, действующую со стороны среды на штамп, амплитуда колебаний которого равна 1. В силу линейности задачи реакция среды на произвольное перемещение штампа представится в виде
R = wQ0.
(5-1)
Внося выражение (5.1) в формулу (1.1) и разрешая относительно и/, получим формулу для вы-
т
140
50
-40
-130
-Г- Г 3 !' 1 а а
! !! у V.-'' •
11 **
и п и ;
0,590
0,613
0,636
0,659 к
г 120
40
-40-
-120
1 N ■V г 1 • / И/ \\ \! в
1 АУ , 1 \ V ч
/Г1 \ ; II : : \ г \ |
к :: и :: и и :: ! Л 11 || м 1) ■г
0,400
0,423
0,446
т 120
40
^0
-120
5 \ 3\ ! у * ^ >1 1; Г I :: И / д
•1 • 11 V1 / *
1
0,530
0,553
0,576 0,599 к
1 60
30-
-30 0,590
т
90
П 4 'Г ^ П 3 V2 б
| | 1 ' 1 ! 1 • • г 1 1 » ; : / \ / \ ( \у _____'"ч М г» » « / \ / \ % ✓ ^ - ч ,1
N / \ \ / \ \\ \ '
0,613
0,636
0,659 к
40'
-10-
-60
Ч 1 Г ; \ г
; 1 \ / \ / V * С 1 \ \
у у У \' \\ V 1'
0,469 к 0,400
0,423
0,446
0,469 к
т 60
30'
-30
к, V „ 2 е
! и \ : / 1 , \ \1 \ у /и 1 А 1 \ } 1
т
0,530
0,553
0,576
0,599 к
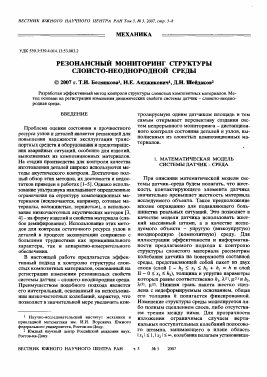
Рис. 1. Влияние изменения структуры среды на амплитуду колебаний массивного датчика. Цифрами 1,2,3 и 4 обозначены кривые, соответствующие толщине верхнего слоя, равной 0,1; 0,2; 0,3 и 0,4. а, 6 - среда "нормального" типа, р. = 0,5; в, г - среда "аномального" типа, ц = 1,5; д, е — однородная среда, ц = 1, 0. а, в, д - идеальное, 6, г, е-вязкое основание
числения амплитуды поступательных вертикальных колебаний жесткого штампа
На рис. 1 представлены графики функций т = I иН -1 и*-1 (и>- и и*- — амплитуды колебаний штампа в случае отсутствия трения между слоями и в случае полного их сцепления соответственно), иллюстрирующие возможность контроля глубины залегания дефекта (расслоения) за счет регистрации изменения резонансной частоты системы датчик - композитная среда. Цифрами 1,2,3 и 4 обозначе
Для дальнейшего прочтения статьи необходимо приобрести полный текст. Статьи высылаются в формате PDF на указанную при оплате почту. Время доставки составляет менее 10 минут. Стоимость одной статьи — 150 рублей.