ИЗВЕСТИЯ РАН. ТЕОРИЯ И СИСТЕМЫ УПРАВЛЕНИЯ, 2014, № 4, с. 123-137
СИСТЕМЫ УПРАВЛЕНИЯ ДВИЖУЩИМИСЯ ОБЪЕКТАМИ
УДК 517.938
СИНЕРГЕТИЧЕСКОЕ УПРАВЛЕНИЕ АСИНХРОННЫМ ТЯГОВЫМ ЭЛЕКТРОПРИВОДОМ ЛОКОМОТИВОВ* © 2014 г. Г. Е. Веселов, А. Н. Попов, И. А. Радионов
Таганрог, Южный федеральный ун-т Поступила в редакцию 08.11.13 г., после доработки 31.03.14 г.
Рассматривается актуальная проблема синтеза системы управления асинхронным тяговым электроприводом локомотивов с учетом процессов в контакте "колесо—рельс". В исследуемой системе имеет место процесс проскальзывания колес относительно рельсового полотна, при этом чрезмерное значение скольжения негативно сказывается на тяговых свойствах локомотива, а также увеличивает износ колесной пары и поверхности рельса. Современные методы решения указанной проблемы основаны на принудительном увеличении коэффициента сцепления в контакте "колесо—рельс" и отслеживания ускорения угловой скорости вращений колесной пары при оценке развитии процесса боксования. Изложен новый подход к синтезу регуляторов тяги локомотивов, основанный на методах синергетической теории управления. Предлагаемый регулятор тяги обеспечивает заданную скорость скольжения колесной пары относительно полотна рельса, тем самым реализуя режим максимальной тяги, а также обладает свойством энергоэффективности, осуществляя минимизацию потерь энергии в силовой части электропривода.
DOI: 10.7868/S0002338814040155
Введение. Несмотря на достаточно долгую историю развития железнодорожного транспорта, проблема формирования тяги остается для него ключевой. Связано это с особенностями свойств сцепления колеса с рельсовым полотном. В случае превышения моментом тяги предельного значения момента сцепления развивается процесс боксования — чрезмерного проскальзывания колес относительно рельса, что негативно сказывается на тяговых свойствах локомотива. В связи с этим конструирование регуляторов, позволяющих наиболее полно реализовать потенциальные свойства сцепления, ведет к повышению эффективности использования современных тяговых электроприводов.
Сложность указанной задачи состоит в необходимости высокоточного регулирования нелинейного тягового асинхронного электропривода (АЭП). Система "тяговый привод—колесная пара (КП)-путь" обладает единственным каналом управления угловой скоростью вращения колеса, воздействуя через который необходимо поддерживать требуемую скорость движения состава и обеспечивать защиту от боксования. Следует учитывать, что поступательное движение состава может осуществляться только при наличии проскальзывания колеса относительно полотна рельса. Причем для поддержания режима максимальной тяги скорость скольжения необходимо держать в требуемом диапазоне, иначе в случае уменьшения величины скольжения ниже определенного значения реализовать максимальную тягу не представляется возможным, а в случае превышения критического значения развивается процесс боксования колес [1, 2].
Исследование скольжения колес относительно рельсового полотна подводит к необходимости учета различных внешних факторов, влияющие на качество сцепления, и детального рассмотрения процессов, происходящих в контакте "колесо-рельс". Последнему вопросу посвящено значительно количество публикаций. Среди наиболее видных отечественных ученых, занимающихся решением указанной проблемы, можно отметить И.П. Исаева, Н.Н. Меншутина, Д.К. Минова, Ю.М. Лужнова, А.Н. Коняева, А.Я. Когана, А.Л. Голубенко, А.Л. Лисицына [3-6]. Тем не менее, несмотря на колоссальный объем работы, выполненный в данном направлении, вопросы наиболее эффективного формирования тяги в системе "тяговый привод-КП-путь", а также механизмы взаимодействия колеса с рельсом и их количественные характеристики остаются открытыми и занимают исследователей и в настоящее время [1, 7, 8].
* Работа выполнена при финансовой поддержке РФФИ (грант № 13-08-00995-а).
Большинство проводимых в этом направлении исследований посвящены определению величин коэффициента тяги конкретных типов локомотивов в зависимости от скорости движения. Эти характеристики традиционно используются при проведении тягово-эксплуатационных расчетов и рекомендуются машинистам при выборе силы тяги в различных режимах движения состава [6, 9]. Значительное число работ посвящено изучению коэффициента фрикционного взаимодействия колеса с рельсом: влиянию загрязнения поверхности рельса, зависимости продольного и поперечного вращательного скольжения, свойств материалов колеса и рельса, а также влияния погодных условий на качество сцепления [10].
Тем не менее на практике используются эмпирические зависимости силы сцепления от скорости движения состава для конкретных типов локомотивов [6]. В работах П.Г. Колпахчьяна [11] указывается на то, что значение момента тяги, которое необходимо поддерживать системой автоматического управления тягового электропривода локомотива, выбирается машинистом на основании визуальной оценки качества сцепления рельсового полотна либо автоматически, с использованием полученных ранее экспериментальных данных. Очевидно, что такой подход не позволяет реализовать режим максимальной тяги локомотива.
Для случая движения состава с постоянной скоростью наиболее распространенным способом защиты от боксования является следующая последовательность действий. Выделяются КП с наименьшей скоростью вращения, и ее частота вращения принимается за "эталонную". В случае, если скорость вращения остальных КП превышает "эталонное" значение, осуществляется сброс тяги для отдельных КП. Помимо этого отслеживают угловое ускорение КП. Если ускорение превышает обозначенную величину, подается сигнал о развитии процессов боксования, для предотвращения которых выполняется сброс тяги [12]. Также существует возможность сравнения скорости вращения колеса и приведенного значения угловой скорости, принимаемого за эталонное и рассчитанное исходя из текущей поступательной скорости движения состава.
С другой стороны, в последние годы наблюдается интенсификация исследований, направленных на поиск путей рационального использования энергетических ресурсов и развитие соответствующих энергосберегающих технологий. Одним из массовых потребителей электрической энергии является железнодорожный транспорт. В этой связи проблема максимально эффективного потребления энергии в тяговом электроприводе локомотивов представляется весьма актуальной.
Проблема энергосбережения в железнодорожном транспорте имеет комплексное решение, т.е. предполагает привлечение различных подходов, отражающих определенные аспекты функционирования электромеханических систем локомотивов в различных режимах движения. Одним из таких подходов является подход, предполагающих поиск законов (алгоритмов) для систем автоведения локомотивов, обеспечивающих оптимизацию энергетических процессов при реализации тяги подвижного состава.
В настоящей статье рассматривается задача синтеза системы управления тяговым электроприводом локомотива в условиях резко меняющихся характеристик сцепления. В качестве тягового двигателя выбран асинхронный двигатель с короткозамкнутым ротором, который обладает рядом преимуществ в сравнении с прочими. К ним относятся относительно низкая масса и высокий удельный КПД, простота конструкции, как следствие, низкая стоимость обслуживания и ремонта и др. Тем не менее регулирование его координат представляется весьма непростой задачей, что определяется существенной нелинейностью и высокой размерностью дифференциальных уравнений его математической модели в разных режимах движения. В статье рассматривается задача управления АЭП в полной нелинейной постановке с учетом внешних возмущений в контакте "колесо—рельс" и минимизацией потерь энергии в обмотках двигателя.
Распространенные в теории и практике законы управления АЭП с компенсацией нелинейно-стей и внутрисистемных связей основываются на принципах одноканального управления, так как один из каналов управления, например амплитуда напряжения статора, ставится в зависимость от другого (частоты питающего напряжения) [1]. Естественно, что данный подход накладывает ограничения на реализацию таких важнейших характеристик АЭП, как диапазон регулирования, жесткость механической характеристики и т.д.
В настоящее время на первый план выдвигаются более сложные задачи анализа машины как элемента сложных замкнутых нелинейных электромеханических систем (ЭМС), оптимизируемых по тому или иному критерию. Здесь модель машины используется для поиска наиболее оптимальных режимов потребления, обеспечивающих также режимы работы для величин, контролируемых внешними воздействиями на машину. Последние превращаются из заданных в иско-
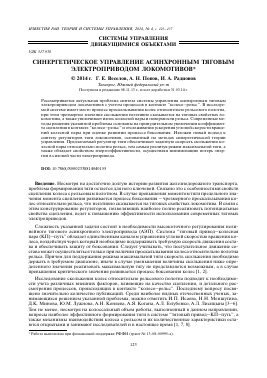
Рис. 1. Схема модели опорно-осевого тягового двигателя с опорно-осевым редуктором
мые функции времени и координат состояния системы, а модель — в инструмент синтеза ее управляющей части.
Для решения задачи синтеза законов векторного управления нелинейными АЭП в статье использованы принципы и методы синергетической теории управления (СТУ) [13]. Совокупность критериев управления или набор желаний проектировщика системы в СТУ принято выражать в виде соответствующей системы инвариантов. При этом инварианты выступают как цель управления, на них обеспечивается выполнение заданной технологической задачи и (или) поддерживаются заданные энергетические (физические, химические и др.) соотношения, а процедура си-нергетического синтеза сводится к поиску законов управления, при которых эти заданные инварианты выполняются.
Основным методом синтеза систем управления СТУ является метод аналитического конструирования агрегированных регуляторов (АКАР) [13, 14]. При его использовании синтезируется закон управления, обеспечивающий перевод изображающей точки замкнутой системы из произвольного начального состояния в окрестность вводимых притягивающих инвариантных многообразий — целевых аттракторов. Тем самым не только выполняется требуемый инвариант, но и обеспечивается асимптотическая устойчивость системы в целом.
1. Математическое представление асинхронного тягового электропривода локомотива. В качестве объекта регулирования в работе
Для дальнейшего прочтения статьи необходимо приобрести полный текст. Статьи высылаются в формате PDF на указанную при оплате почту. Время доставки составляет менее 10 минут. Стоимость одной статьи — 150 рублей.