ИЗВЕСТИЯ РАИ. ТЕОРИЯ И СИСТЕМЫ УПРАВЛЕНИЯ, 2007, № 3, с. 154-162
= СИСТЕМЫ УПРАВЛЕНИЯ ДВИЖУЩИМИСЯ ОБЪЕКТАМИ =
УДК 681.533:621.452:004.451.7
СИНТЕЗ НЕЛИНЕЙНЫХ ОПТИМАЛЬНЫХ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ГАЗОТУРБИННЫХ ДВИГАТЕЛЕЙ В РЕАЛЬНОМ ВРЕМЕНИ
© 2007 г. О. Д. Лянцев
Уфа, Институт механики Уфимского научного центра РАН Поступила в редакцию 07.12.05 г., после доработки 20.07.06 г.
Рассматривается подход к решению центральной проблемы теории автоматического управления применительно к цифровым системам автоматического управления авиационным двигателем, основанный на формировании на каждом такте управления критерия оптимальности в виде целевой функции и определении оптимальных управляющих воздействий из решения полученной задачи нелинейного программирования. Представлены результаты синтеза системы управления заданной скоростью полета тяжелого транспортного самолета, оптимальной по километровому расходу топлива.
Введение. В настоящее время является актуальным создание систем управления техническими объектами, оптимально использующих на каждом режиме своего функционирования все имеющиеся ресурсы - энергетические, информационные, вычислительные и др. для достижения главной для этого режима цели при наличии множества ограничений [1]. В полной мере это относится и к системам управления для авиационных силовых установок, для которых подлинная оптимизация возможна только в процессе функционирования системы, так как учитывает текущую обстановку и возникшую ситуацию. Поэтому оптимизация в "большом", по глобальным критериям, осуществляемая в реальном времени в процессе управления, - центральная проблема теории управления авиационным газотурбинным двигателем (ГТД) [1].
ГТД представляет собой нелинейный нестационарный многомерный и многосвязный объект, поэтому для эффективного управления им необходимо применять нелинейное оптимальное многосвязное управление. Без этого невозможно обеспечить предельные значения некоторых двигательных и эксплуатационных параметров (время переходных процессов, удельный расход топлива, ресурс и т.д.) и максимально задействовать свойства двигателя. Так как характеристики двигателей существенно различаются в пределах одной серии, а также меняются в эксплуатации, необходимо решать задачу оптимизации управления в реальном масштабе времени. Каждый режим работы двигателя (взлетный, номинальный, силовой посадки и т.д.) характеризуется своей целью управления. Режимы работы ГТД меняются в ходе полета летательного аппарата и соответственно корректируются цели управления. Формализовать эти цели в рамках единого посту-
лируемого критерия оптимальности типа функционала обобщенной работы не представляется возможным из-за сохраняющейся проблемы выбора весовых коэффициентов подобных критериев в нелинейных системах [2].
Анализ известных методов синтеза оптимальных многосвязных систем автоматического управления (МСАУ) ГТД в реальном времени показал, что их недостатки: а) нерешенная проблема выбора структуры и весовых коэффициентов оптимизирующих функционалов; б) по-прежнему открытая проблема обеспечения многофункциональности системы управления; в) невозможность управлять переходными процессами с учетом ограничений по двигателю и исполнительным органам; г) отсутствие явного учета ограничений на параметры двигателя и исполнительные органы - делают неприемлемым их использование для решения центральной проблемы теории управления ГТД.
Для эффективного управления авиационным двигателем необходимо, чтобы структура и параметры критерия оптимальности наиболее адекватно отражали текущую цель управления [2]. Это обстоятельство приводит к необходимости формализовать меняющиеся во времени цели управления в виде критериев оптимальности, определять их структуру и параметры непосредственно в процессе функционирования системы. Целесообразно формировать критерии оптимальности в виде квадратичных целевых функций, что дает возможность в рамках единого подхода синтезировать системы управления, оптимальные по различным "глобальным" критериям, а не только по точности управления.
Таким образом, решение центральной проблемы теории управления ГТД можно осуществить на пути системной интеграции методов формиро-
вания критериев оптимальности и решения в реальном времени сформированных оптимизационных задач. Подобный подход позволяет реализовать потенциально достижимые характеристики цифрового управления ГТД и создать адаптивную оптимальную САУ ГТД. Под оптимизацией управления здесь понимается оптимизация глобальных критериев - максимизация тяги, минимизация удельного расхода топлива, времени приемистости и т.п., а не только точности управления. МСАУ, спроектированная на основе этого подхода, в основном представляет собой алгоритм, осуществляющий на каждом такте управления формирование целевой функции и определение управляющих воздействий путем ее минимизации в реальном масштабе времени.
1. Постановка задачи синтеза локально-оптимальных САУ в реальном времени. Пусть объект управления имеет т независимых управляющих воздействий и на систему управления возлагается задача выполнять т программ регулирования (в простейшем случае, это поддержание постоянных значений для т параметров двигателя). Частота выдачи решений в цифровой системе управления предполагается известной и равной /, т.е. период квантования по времени равен т = 1/ Дана дискретная модель объекта управления в виде следующих нелинейных векторно-матричных разностных уравнений:
Ах (7 +1) = А (7 )Д х (7) + В (7 )Д и (7),
Ау( 7 +1 ) = С( 7 )Ах ( 7 ) + Б ( 7 )Д и ( 7 ),
Ах (i + 1) = х (i + 1) - x , Ay(i +1) = y(i +1) -y0,
(1.1)
Ах (7 ) = х ( 7 ) - х , Аи (7 ) = и ( 7 ) - и ,
где х(7) - «-мерный вектор, координатами которого являются частоты вращения роторов двигателя, у(7) - к-мерный вектор других двигательных параметров, подлежащих управлению во время работы двигателя (все компоненты векторов х(7) и у(7) измеряются), и(7) - т-мерный вектор управления, векторы х0, у0, и0 определяют параметры стационарного режима, А, В, С, Б - матрицы размерностей п х п, п х т, к х п, к х т соответственно. Элементы этих матриц - известные нелинейные функции от режима двигателя и внешних условий, но на одном такте управления принимаются постоянными. Координаты векторов х(7) и у(7) измеряются соответствующими датчиками. На скорость вектора управления и(г) наложено условие
• lim ^ • , . ч ^ • lim U1 < U(i )< U2 ,
(1.2)
них или верхних физических упоров соответству-
• lim • lim
ющие элементы в векторах u1 и u2 становятся равными нулю. Уравнения (1.1) получены дискретизацией известными способами системы непрерывных векторно-матричных уравнений объекта управления, представленных в нормальной форме Коши.
В контуре управления имеется бортовая цифровая вычислительная машина (БЦВМ), в памяти которой хранятся числовые матрицы модели двигателя (1.1) с элементами, зависящими от режимов работы и условий полета. Период обновления управления равен т. Полагаем, что в каждый i-й такт управления в БЦВМ вводятся текущие значения координат векторов x(i), y(i) и выводятся управляющие воздействия u(i) на исполнительные механизмы. В системе управления определяются программные значения двигательных параметров, подлежащих регулированию. Их значения рассчитываются по известным соотношениям в зависимости от текущего положения рычага управления двигателем, а также от температуры и давления воздуха на входе в двигатель. Из программных значений двигательных параметров, подлежащих регулированию на следующем такте управления, формируется вектор Zpr(i + 1). Размерность вектора Zpr(i + 1) равна m, т.е. числу управляющих органов. Это означает, что система управления должна одновременно выполнять программы регулирования по m двигательным параметрам.
Вводится в рассмотрение вектор траекторного отклонения e(i + 1)
e(i + 1) = e(u(i)) = ZPr(i + 1) - Z(i + 1), (1.3)
где Z(i + 1) представляет значения двигательных параметров, описанных вектором Zpr(i + 1), на следующем такте управления. Тогда задачей управления является отслеживание с максимально возможной точностью значениями координат вектора Z(i + 1) заданной программы Zpr(i + 1)
J = || e (u (i ))|| = = ||Zpr(i + 1) - Z(i + 1 )|| -
(1.4)
min,
где || || - норма вектора e(i + 1), т.е. для временного интервала [i, i + 1] определяется вектор управления u(i), обеспечивающий ||e(u(i))|| —► min. При этом скорости изменения координат вектора управления должны удовлетворять ограничениям (1.2), которые можно записать в стандартной форме, полагая, что u(i) х т = u(i) - u(i - 1)
• lim • lim
здесь u1 и u2 - заданные векторы, ограничивающие диапазон значений скорости изменения управляющих воздействий u (i). При достижении исполнительными механизмами (ИМ) своих ниж-
h1(u(i)) = -u(i) + u(i -1) + u т< 0,
• lim
(1.5)
И2(и(7)) = и(7) + и(7 -1) + и2 т< 0.
Возьмем в качестве нормы вектора е(и(г)) в (1.4) квадрат евклидовой нормы
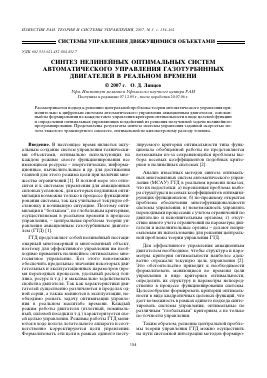
5 u
ИМ
САУ ГТД
Рис. 1. Концептуальная функциональная схема системы управления ГТД, ОруД - перемещение управления двигателем.
m
J(u(i)) = У Jj[Zp/(i +1) -
f^i (1.6)
- Zj (i +1) ]2 —»- min,
где Zj(i + 1) задаются соотношениями (1.3), a j -весовые коэффициенты, обратно пропорциональные квадратам допустимых статических ошибок выполнения программ регулирования. Их назначение - привести слагаемые в целевой функции (1.6) к относительному безразмерному виду. На каждом i-м такте управления будем находить вектор управления, обеспечивающий минимум целевой функции (1.6) при ограничениях (1.5). В этом случае процесс управления сводится к формированию критерия оптимальности в виде квадратичной функции от управляющих воздействий, решению задачи квадратичного программирования в БЦВМ в дискретные моменты времени ti, i = 0.1, ..., и реализации полученных управляющих воздействий.
Таким образом, отсутствует необходимость понижать порядок дифференциальных уравнений, описывающих объект управления, и размер системы этих уравнений, что позволяет учитывать ее малые параметры. Использование для формирования критерия оптимальности системы нелинейных уравнений (1.1) лю
Для дальнейшего прочтения статьи необходимо приобрести полный текст. Статьи высылаются в формате PDF на указанную при оплате почту. Время доставки составляет менее 10 минут. Стоимость одной статьи — 150 рублей.