УДК 681.518.52
СИСТЕМА ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ АНТЕННЫ, РАСПОЛОЖЕННОЙ НА МАЧТЕ
Е.Т. Евстигнеев, М.В. Карпов
Рассмотрена система определения положения радиолокационной антенны, закрепленной на гибкой мачте и совершающей колебания относительно неподвижной системы координат, жестко связанной с точкой закрепления мачты. Получены соотношения для расчета перемещений антенны относительно неподвижной системы координат и предложены способы уменьшения вносимых колебаниями антенны погрешностей системы.
При сканировании местности часто возникает ситуация, при которой радиолокационная станция в целях маскировки укрывается в лесном массиве. Антенна на время сканирования поднимается над подстилающей поверхностью на раздвижной мачте длинной до 30 м.
Антенна под действием ветровых нагрузок совершает случайные колебания, которые искажают показания радиолокатора. Для компенсации этих искажений можно использовать данные о перемещении антенны относительно точки закрепления мачты. Эти данные вводятся в ЭВМ с целью приведения электронного отображения местности к неподвижной системе координат, связанной с точкой закрепления мачты. Для исключения движения самой антенны, вызванного сканированием местности, удобнее определять перемещения платформы, на которой закреплена антенна.
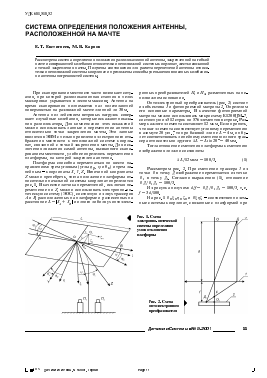
Платформа способна перемещаться по шести направлениям: трем угловым (углы фр, ц/ и 9К) и трем линейным — координаты X, У, Ж. Величиной координаты Z можно пренебречь, тогда положение платформы относительно начальной системы координат определится рис. 1. В качестве датчика перемещений, исключая перемещение по Д можно использовать электронно-оптическую систему (ЭОС), состоящую из двух трассеров А и В, расположенных на платформе и разнесенных на расстояние Ь = \ХА + и одного либо двух оптоэлект-
ронных преобразователей П\ и /72. размещенных на неподвижном основании.
Оптоэлектронный преобразователь (рис. 2) состоит из объектива 1 и фотоприемной матрицы 2. Определим его основные параметры. В качестве фотоприемной матрицы можно использовать микросхему К1200ЦМ-7, состоящую из 512 строк по 576 элементов в строке. Размер каждого элемента составляет 12 мкм. Если принять, что шаг элемента соответствует угловому перемещению в азимуте 20 угл.", то при базовой длине Ь = 4 м, он будет соответствовать линейному смещению одного трассера относительно другого А£ = ¿8т20"= 40 мм.
Тогда отношение смещения платформы к смещению изображения должно составлять:
Д£/12 мкм = 100/3. (1)
Рассмотрим рис. 2. При смещении трассера 3 из точки О в точку Д изображение перемещается из точки 0\ в точку Д\. Согласно выражению (1), отношение ОД/ОхДх = 100/3.
Из рисунка получим: (!//= 0Д/0\Д\ = 100/3, т. е. /= ЗйГ/100.
На рис. 1 Он^нПн^н и — соответственно зем-
ные системы координат, связанные с платформой при
Рис. 1. Схема электронно-оптической системы определения углов отклонения платформы
Рис. 2. Схема ^
оптоэлектронного
преобразователя
Датчики и Системы • № 5.2001
11
Рис. 3. Схема определения угловых и линейных перемещений платформы
Рис. 4. Система координат платформы (а) и прекции трассеров на матрицу (б)
Углы Ц1 и 9К при условии их малости можно считать функциями перемещений А и У:
ц> =/(х); 9К =Ду).
Зная параметры мачты и платформы, можно рассчитать нужные зависимости или снять их экспериментально на реальном устройстве.
Для определения ошибок вычисления координат ХА, Хв, УА, Ув рассмотрим систему координат, показанную на рис. 4.
Если трассеры расположены на оси X, то поворот на угол не меняет их пространственного положения. Этот поворот можно не рассматривать.
На рис. 4 показаны проекции траекторий трассеров на горизонтальную плоскость, на которой производится измерение координат.
Начальное положение характеризуется следующими координатами: ХАн = ХА; ХВн = Хв; УАн = УВн = 0.
Координаты трассеров в точках X траектории определяются соотношениями:
Х'А = ХАсотрр\
Хд = ХВСО$($р\
ХА ~ ХА
Хн:
хв ~ хв
хнI
ХА = со8 Ф/) со8 V — Хн'> ХВ = А^СОвф^СОвЧ/ — Хн.
Аналогичные результаты можно получить для координат трассеров в точках У.
Подставляя конечные значения проекций координат трассеров в уравнение (2), получим для углового перемещения платформы в азимуте:
у в- ¥а" = (^д-Л^тфрСскч/ ( ХВ'-ХА' (Хв-Хл)С08<ррС08\\1 р'
Используя уравнения (3, 4) можно получить значения линейных перемещений платформы.
Если трассеры расположены по оси Асимметрично относительно начала координат, то Хв = —ХА, тогда
ХВ + ХА
ее неотклоненном и отклоненном положениях; ОХУ/ — система координат, связанная с платформой мачты.
Если принять высоту мачты равной 30 м, то/= 0,9 м. Определим фокусное расстояние линзы по формуле 1 /с1+ 1//= 1 /Р или Р = с1//(с1 + /) « 0,88 м.
Таким образом, угловое перемещение платформы в азимуте ф^, можно определить, измеряя относительное перемещение трассеров. Для измерения линейных перемещений А и К необходимо определить совместное перемещение трассеров по осям Хм К соответственно рис. 3.
Из этого рисунка получим
У — У
<рр = аг^ в А , (2)
лв-лА
■V (3)
(4)
'В^ 'А = у 2
Отсюда можно сделать вывод, что перемещения платформы не вносят ошибок в определение угла азимута и координат Хн и Ун.
Определим предельные отклонения платформы, фиксируемые оптоэлектронным преобразователем. Один элемент матрицы соответствует 20 угл.". Учитывая, что в строке 576 элементов, полный угол составит 576/180 = 3,2°. По линейным перемещениям цена одного элемента матрицы — 0,4 мм. Полное отклонение по оси X— 230, по оси У— 205 мм.
Есть возможность электронными средствами втрое увеличить чувствительность элементов матрицы и соответственно диапазоны измерения. Если и в этом случае при совместном действии угловых и линейных перемещений имеющегося диапазона не хватает, матрицу можно установить на подслеживающий привод, переме-
12 _ Бепзогэ & БувЁвшэ • № 5.2001
щающий ее вслед за изображением трассера. Приведенные выше диапазоны измерений показывают, что спроектировать изображение двух трассеров на матрицу невозможно, следовательно, необходимы две матрицы, т. е. два оптоэлектронных преобразователя, разнесенных на то же расстояние /,. что и трассеры.
Сигнал с матрицы считывается в дискретные моменты времени с частотой 25 Гц, т. е. с периодом квантования Тк = 0,04 с. Определим максимальную разность углов соседних отсчетов. При синусоидальном изменении угла максимальная скорость его изменения будет при ю/= 0, п и т. д., ф = щтл2п/Г. Принимая фо = 1,5°, /= 2,5 Гц, Тк = 0,04 с, получим <р = 1,5яп5я0,04« 0,7°, где/^ частота колебаний платформы.
Таким образом констатируем, что при получении точных координат в дискретные моменты времени разность углов соседних отсчетов значительно превышает допустимую ошибку.
Электронно-оптическая система определения координат платформы может быть использована непосредственно лишь в случае совпадения во времени момента отсчета положения с моментом отсчета с ЭОС.
В противном случае на платформе должен быть установлен гироскопический датчик в качестве хранителя информации о положении платформы между отсчетами. Причем, коррекция в азимуте, обычно трудно решаемая другими методами, с помощью ЭОС решается просто.
Если по каким-либо причинам трудно определить зависимость углов ц/ и 9К от перемещений X и У, коррекцию в горизонте можно осуществить при прохождении платформой некоторых характерных точек, например, точек с координатами ц/ = 0 или 9К = 0.
Евгений Тимофеевич Евстигнеев — канд. техн. наук, доц.; Михаил Владимирович Карпов — студент ТулГУ. Ш (087-2) 35-19-59 □
УДК 681.128.625.11
ДАТЧИКИ УРОВНЯ ПУТЕВЫХ МАШИН С ЦИФРОВЫМИ ФИЛЬТРАМИ
Ю.В. Иванов
Проведен анализ возмущений, действующих на датчики уровня путевых машин в различных режимах их работы. Предложены алгоритмы цифровых фильтров для подавления вибрационных и импульсных воздействий и расчетные соотношения для выбора их параметров.
Измерение превышения одного рельса над другим является одной из важных операций при строительстве, капитальном ремонте и контроле качества железнодорожного пути. В настоящее время для этого используются маятниковые датчики прямого измерения на базе физического маятника и датчики косвенного измерения на основе линейного акселерометра1 [1]. В большинстве случаев датчик работает одновременно с вибрационным уплотнением балласта рабочими органами путевой машины. В датчиках прямого измерения подавление вибрационной составляющей сигнала обеспечивается фильтрующими свойствами маятника. Полоса пропускания линейных акселерометров включает в себя частоту вибрации рабочих органов. Поэтому датчик косвенного измерения должен иметь в своем составе фильтр нижних частот.
Основными параметрами фильтров нижних частот являются ширина полосы пропускания, степень подавления сигнала в полосе задерживания и реакция фильтра на единичное импульсное воздействие.
1 Распопов В.Я., Иванов Ю.В., Зотов С.А. Датчики уровня систем управления выправочных железнодорожных машин // Датчики и системы. 1999. № 4.
Значения этих параметров и структура фильтра определяются такими характеристиками путевых машин, как скорость движения в рабочем режиме, а также частота и амплитуда основной гармоники вибрации под-бивочного блока.
Ширина полосы пропускания фильтра зависит от скорости движения машины в рабочем режиме и частоты собственных колебаний автоматической системы выправки пути. Искажение сигнала датчика по фазе приводит к тому, что система управления будет иметь недопустимо большие ошибки или может потерять устойчивость. Если датчик используется в информационно-измерительной системе разомкнутого типа, то запаздывание сигнала приводит к неправильной "привязке" значения превышения одного рельса над другим по продольной координате, измеренной с помощью датчика пути. Для машин, скорость движения которых в рабочем режиме не превышает 1 м/с (например, ВПО-З-ЗООО, ДСП) ширина полосы пропускания прибора должна составлять не менее 0^1 Гц. Однако некоторые машины наряду с рабочим режимом имеют и режим "измерительной поездки" со скоростью порядка 4 м/с, во время которого происходит запись неровности пути в бортовой ко
Для дальнейшего прочтения статьи необходимо приобрести полный текст. Статьи высылаются в формате PDF на указанную при оплате почту. Время доставки составляет менее 10 минут. Стоимость одной статьи — 150 рублей.