ИЗВЕСТИЯ РАН. ТЕОРИЯ И СИСТЕМЫ УПРАВЛЕНИЯ, 2015, № 3, с. 156-167
СИСТЕМЫ УПРАВЛЕНИЯ ДВИЖУЩИМИСЯ ОБЪЕКТАМИ
УДК 62-50
СИСТЕМА УПРАВЛЕНИЯ НЕГОЛОНОМНЫМ ОДНООСНЫМ КОЛЕСНЫМ МОДУЛЕМ ДЛЯ МОНИТОРИНГА ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ АЭРОДРОМНЫХ ПОКРЫТИЙ* © 2015 г. В. Н. Максимов, А. И. Черноморский
Москва, МАИ (национальный исследовательский ун-т) Поступила в редакцию 10.07.14.г., после доработки 01.12.14 г.
Решается задача разработки системы управления неголономным измерительным одноосным колесным модулем, предназначенным для мониторинга геометрических параметров аэродромных покрытий. В рамках нелинейного подхода синтезируется подсистема траекторного управления на основе использования кинематической модели неголономного моноцикла и подсистема локомоционного управления с использованием метода частичной линеаризации модели объекта обратной связью по выходу. Приводятся результаты численного моделирования синтезированной системы с учетом возмущающих воздействий.
Б01: 10.7868/80002338815030130
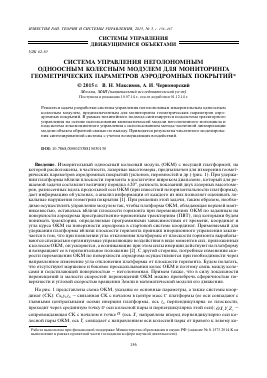
Введение. Измерительный одноосный колесный модуль (ОКМ) с несущей платформой, на которой расположены, в частности, лазерные высотомеры, предназначен для измерения геометрических параметров аэродромных покрытий (уклонов, неровностей и др.) (рис. 1). При удержании платформы вблизи плоскости горизонта в достаточно широком диапазоне, который для решаемой задачи составляет величину порядка ±20°, разность показаний двух лазерных высотомеров, разнесенных вдоль продольной оси ОКМ (при известной негоризонтальности платформы), дает информацию об уклонах, а анализ информации от каждого из них позволяет оценивать локальные нарушения геометрии покрытия [1]. При решении этой задачи, таким образом, необходимо осуществлять управление модулем так, чтобы платформа ОКМ, обладающая верхней маят-никовостью, оставалась вблизи плоскости горизонта при перемещениях ОКМ по заданным на поверхности аэродрома пространственно-временным траекториям (ПВТ), под которыми будем понимать траектории, определяемые программными зависимостями от времени, координат и угла курса ОКМ на поверхности аэродрома в стартовой системе координат. Применяемый для удержания платформы вблизи плоскости горизонта принцип инерционного управления заключается в том, что при появлении угла отклонения платформы от плоскости горизонта вырабатываются специально организуемые управляющие воздействия в виде моментов сил, приложенных к колесам ОКМ, он ускоряется, а возникающие при этом силы инерции действуют на платформу и возвращают ее в горизонтальное положение [2]. С другой стороны, потребные изменения скорости перемещения ОКМ по поверхности аэродрома осуществляются при необходимости через направленное изменение угла отклонения платформы от плоскости горизонта. Будем полагать, что отсутствуют маршевое и боковое проскальзывания колес ОКМ и поэтому связь между колесами и подстилающей поверхностью — неголономная. Примем также, что в силу локальности перемещений и малости скоростей перемещений ОКМ можно пренебречь сферичностью поверхности и угловой скоростью вращения Земли в математической модели его движения.
На рис. 1 представлена схема ОКМ, указаны ее основные параметры, а также системы координат (СК): Схъуъгъ — связанная СК с началом в центре масс С платформы (ее оси совпадают с главными центральными осями инерции платформы, ось перпендикулярна ее плоскости, проходит через срединную точку О оси колесной пары и перпендикулярна этой оси); ОХ^с^с — сопровождающая СК с началом в точке О (ось Хс направлена вперед перпендикулярно оси колесной пары ОКМ, ось Ус совпадает с направлением оси колесной пары от правого к левому ко-
* Работа выполнена при финансовой поддержке Министерства образования и науки РФ (задание № 8.1573.2014.К на выполнение в рамках проектной части госзадания в сфере научной деятельности).
гс А
Лазерный высотомер
Z
J г
V Направление перемещения
Рис. 1. Схема ОКМ
лесу ОКМ, ось 2С вертикальна и дополняет систему до правой тройки); ОХЛ — инерциальная стартовая горизонтальная СК (в точке старта ее оси совпадают с осями СК ОХсУс^с ). На рис. 1 обозначены также а — угол отклонения оси гъ от вертикали (плоскости хъуъ платформы от плоскости горизонта ХСУС); фг и ф 1 — углы поворотов соответственно правого и левого колес; тр — масса платформы; т„ — масса колеса; Я — радиус колеса; й — расстояние от центра О оси колес до центра масс платформы С; Ъ — половина длины оси колесной пары; 0 — угол курса ОКМ; и — скорость поступательного перемещения платформы в плоскости горизонта.
1. Постановка задачи. Задача настоящей работы — синтез моментов сил, приложенных к колесам ОКМ и обеспечивающих перемещение центра О оси колесной пары ОКМ по заданной ПВТ при одновременной стабилизации платформы ОКМ вблизи плоскости горизонта (стабилизации оси гъ вблизи вертикали места 2С).
В силу необходимости в общем случае выхода ОКМ на заданную ПВТ из произвольной точки подстилающей поверхности задача синтеза принципиально является нелинейной с ограничениями, доставляемыми неголономностью. В этой связи целесообразно использовать подход к синтезу системы управления как к двухконтурной, заключающийся в синтезе сначала подсистемы траекторного, а затем локомоционного управлений ОКМ. Под синтезом подсистемы траектор-ного управления будем понимать синтез потребных значений скоростей поступательного и и
вращательного 9 движений неголономного ОКМ, обеспечивающих устойчивое движение по ПВТ и используемых в качестве программных в подсистеме локомоционного управления. Эти потребные значения скоростей могут отличаться от их значений, соответствующих заданной ПВТ, в силу возможного нарушения условий неголономности (наличие проскальзываний колес ОКМ) в реальных условиях эксплуатации. Под синтезом подсистемы локомоционного управления будем понимать синтез собственно управляющих моментов на колесах ОКМ по информации, поступающей от траекторной подсистемы и от измерителей кинематических параметров движения, установленных на его платформе.
2. Математическая модель ОКМ. В [3] получена математическая модель движения неголономного ОКМ в следующем виде:
(2.1)
a(mpd2 + Jyb) - i02 sin 2a(Jxb - Jb + d 1mp) + dmp (Ucosa - gsina) + + c, (á - ф,) + cr (ca - фr) = tr + t,;
и (mp + 2mw + ~Jt) -1 (ci (a - ф,) + cr (a - фr)) + dmp(a cos a + a2 sin a) = 1 ( тr + т,) ;
2Jd + J b + 2b mw + sin a( Jxb - Jzb +d mp)
2Jwb
2\
p" R2
+b (c, (a -Ф i ) + cr (a -фг)) +
R
(2.2)
(2.3)
(2.4)
2b
+ 0ásin2a(Jxb - Jzb + d mp) - — (xr - т,),
R
где Jd, — моменты инерции колеса вокруг его диаметра и оси вращения соответственно; 1хЬ, 1уЬ, Jzb — главные центральные моменты инерции платформы вокруг осей хь, уь, гь соответственно; сг и с1 — коэффициенты вязкого трения в осях правого и левого колес; тг, т1 — моменты силы на правом и левом колесах ОКМ; матрица £ (д) такова:
* (q) =
cos О sin t
0
0 0 10 0
0 0— b R R
1 0 I - b
0
R RJ
Уравнение (2.1) — кинематическая модель неголономного ОКМ с вектором состояния q = [x y 0 a фr ф,]Т,где x, y — координаты точки O в СК OXYZ, а уравнения (2.2)—(2.4) описывают динамику вектора скоростей v = [á u 9]Т.
3. Подсистема траекторного управления ОКМ. Для синтеза траекторного управления упростим модель (2.1). С этой целью будем интерпретировать кинематику движения центра O оси колесной пары ОКМ по заданной ПВТ, определяемой программными зависимостями x(t), y (t), 0(t), как кинематику движения вертикального уницикла — катящегося по плоской поверхности колеса, обладающего скоростью перемещения центра колеса и и угловой скоростью разворота по
курсу 9. Эта интерпретация адекватна, поскольку при отсутствии проскальзывания движение центра колеса и точки O ОКМ по заданной ПВТ идентичны. Тогда условие неголономности (отсутствия проскальзывания уницикла в поперечном направлении) принимает вид [4]
—x sin 9 + y cos 9 = 0, (3.1)
а кинематическая модель движения такова:
q = * (q) v,
где
(3.2)
q = [x y 0]т,
* (q) =
cos 0 sin 0 0 0 0 1
у = [и 9]Т.
Кинематическую модель (3.2) будем трактовать как уравнение движения объекта с вектором состояния д и вектором управления V. Применительно к вектору опорного управления V, соответствующему заданной пространственно-временной траектории, на основании (3.2) можно получить опорный вектор д . Однако в реальных условиях эксплуатации текущее значение
дт = [хт ут 0т]т этого вектора в инерциальной СК отличается от опорного д и может быть опре-
т
делено с помощью измерителей на борту ОКМ. По величине ошибки е = д - дт можно скорректировать вектор управления V, обеспечивая стабилизацию движения ОКМ на заданной ПВТ
Рассмотрим процедуру коррекции вектора управления V. Элементы вектора опорного управления V определяются соотношениями
= ±yfx
, .2 .2
и = ±V x + y ;
yx - xy
.2 .2 ' x + y
(3.3)
где х, у — текущие координаты заданной ПВТ. Выбор знака в соотношении (3.3) зависит от направления движения.
Вектор ошибки е в проекциях на оси сопровождающей СК ОХсУс^с таков:
e =
e2 =
_e3 _
cos 0т sin Qm 0 - sin 0m cos 0m 0 0 0 1
X Xm
У - Ут
(3.4)
Дифференцируя (3.4) и учитывая условие неголономности (3.1), записанное для элементов опорного вектора состояния д, получим (см. Приложение)
e1
e2 =
_e3 _
me2 Um +UCOs e3
-0 mei +u sin ез
(3.5)
V m _
'Um ' _
_
(3.6)
Примем вектор управления vm в следующем виде: и cose3 + K1e1 1 + uK2e2 + K3 sine3 _
где K1, K2, K3 — положительные коэффициенты.
Элемент и cos e3 в (3.6) использован для компенсации нелинейности в уравнениях (3.5), а элементы K1e1 и uK2e2 служат для организации отрицательных обратных связей по ошибкам e1 и e2. Элемент K3 sin e3 введен для организации обратной связи по ошибке e3, причем в отличие от аналогичного элемента в управлении, предложенном в [5] для неголономного уницикла, он не зависит от скорости и и, как следствие, обеспечивает управление, эффективное и при низкоскоростных маневрах ОКМ.
Подставляя управления (3.6) в уравнения (3.5), получим уравнения динамики ошибок замкнутой системы:
(8 + иK2e2 + K3 sin e3)e2 - K1e1 - (8 + иK2e2 + K3 sin e3) e1 + и sin e3 -uK2e2 + K3 sin e3
_e1"
=
Для дальнейшего прочтения статьи необходимо приобрести полный текст. Статьи высылаются в формате PDF на указанную при оплате почту. Время доставки составляет менее 10 минут. Стоимость одной статьи — 150 рублей.